

4. 13. Асинхронным регулируемый
электропривод в каскадных системах
Каскадные электроприводы с асинхронными двига- телями с фазным ротором в отличие от асинхронных электроприводов с параметрическими и импульсными способами управления целесо- образно применять в установках средней и большой мощности, рабо- тающих в продолжительном режиме при относительно небольших диапазонах регулирования. К таким установкам относятся, например, воздуходувки, центробежные насосы, шахтные вентиляторы, приводы бумажных машин, шаровые мельницы и др.
Каскадные электроприводы позволяют полезно использовать энер- гию скольжения, повышая при этом эффективность электропривода. Они легко поддаются автоматизации и позволяют обеспечить оптималь- ный режим работы производственного механизма.
Каскадные электроприводы в зависимости от того, как реализу- ется энергия скольжения, разделяются на электрические и электро- механические. В электрических каскадах энергия скольжения за вы- четом потерь возвращается в питающую сеть. В электромеханических энергия скольжения, преобразованная в механическую энергию, воз- вращается на вал основного асинхронного двигателя.
По типу устройства, преобразующего энергию скольжения, раз- личают электромашинные, вентильно-машинные и вентильные каскады.
Электромашинные каскады с асинхронными двигателями не полу- чили широкого применения, так как предусматривали включение в роторную цепь одноякорного преобразователя, отличающегося повышенной инерционностью, неудовлетворительными условиями ком- мутации и неустойчивой работой при малых скольжениях.
Бурное развитие силовой полупроводниковой техники и особенно тиристоров, а также интегральных систем управления значительно расширило область использования вентильных каскадных приводов, повысив их надежность и КПД.
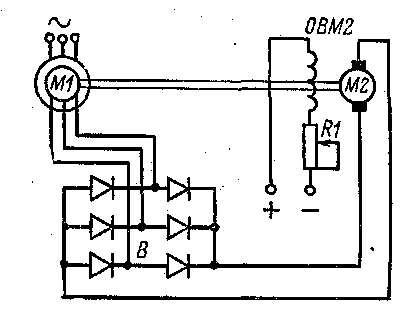
Наиболее простыми схемами вентильных и вентильно-машинных каскадов являются схемы с промежуточным звеном постоянного тока. Принципиальная схема вентильно-машинного электрического каскада с промежуточным звеном постоянного тока приведена на рис. 4. 60. Здесь обмотка статора основного асинхронного двигателя M1 при- соединена к сети переменного тока промышленной частоты, а роторная обмотка соединена с выпрямительным мостом В. Энергия скольже- ния, преобразуемая выпрямительным мостом, реализуется двигателем постоянного тока М2. С помощью синхронного генератора О, нахо- дящегося на одном валу с двигателем постоянного тока, энергия сколь- жения за вычетом потерь возвращается в питающую сеть.
Регулирование угловой скорости двигателя M1 осуществляется изменением добавочной ЭДС, создаваемой машиной М2 в цепи выпрям-
лепного тока посредством воздействия на ток возбуждения этой ма- шины при помощи R1.
При работе каскада в двигательном режиме выпрямленное напря- жение ротора должно уравновешивать противо-ЭДС машины постоян- ного тока, падение напряжения в активных сопротивлениях роторной цепи, а также падение напряжения, обусловленное процессом комму- тации вентилей.
Ток, протекающий в цепи выпрямленного напряжения, опреде- ляется по формуле
![]() (4.79)
(4.79)
где Еd0 — среднее значение ЭДС на выходе выпрямительного моста при скольжении s = 1,
![]() (4.80)
(4.80)
Rэ — эквивалентное сопротивление роторной цепи; Е2К — линейное напряжение на кольцах ротора M1 при s = 1; Едоб — добавочная ЭДС, определяемая противо-ЭДС машины постоянного тока М2; 2ΔU — падение напряжения на вентилях.

Если принять Id = 0, то можно, отвлекаясь от области прерыви- стых токов, найти скольжение, отвечающее угловой скорости идеаль- ного холостого хода:
![]() (4.81)
(4.81)
или, для упрощения полагая ΔU = 0, получить:
![]() (4.82)
(4.82)
где ω0 — синхронная угловая скорость асинхронного двигателя M1.
Таким образом, угловая скорость идеального холостого хода каскада снижается по мере увеличения Едоб.
Мощность скольжения, лроходящая через роторную цепь, вос- принимается, за исключением потерь, двигателем постоянного тока М2 и равна:
![]() (4.83)
(4.83)
здесь т — число фаз выпрямителя (для мостовой схемы т = 6); хД— приведенное к цепи ротора индуктивное сопротивление фазы асин- хронного двигателя.
Из (4. 83) момент двигателя
![]() (4.84)
(4.84)
После соответствующих преобразований получим:
 (4.85)
(4.85)
где
![]() ;Rд—
приведенное к цепи ротора
активное
сопротивление фаз асинхронного
двигателя; Rя
—
сопро-
тивление
якорной цепи двигателя постоянного
тока М2.
;Rд—
приведенное к цепи ротора
активное
сопротивление фаз асинхронного
двигателя; Rя
—
сопро-
тивление
якорной цепи двигателя постоянного
тока М2.
Пренебрегая в (4. 85) слагаемым тхд (s — s0) /2π по сравнению с Rэ (при значениях s, близких к s0), получаем:
![]() (4.86)
(4.86)
На рис. 4. 61 приведены механические характеристики электриче- ского каскада.
Полное использование асинхронного двигателя в электрическом каскаде достигается в случае постоянства момента нагрузки (при

независимой вентиляции) на его валу, поэтому вентильно-машин- ный электрический каскад иног- да называют каскадом постоян- ного момента.
В рассматриваемом случае установленная мощность выпря- мительного моста и машины
Рис. 4. 61. Механические харак- теристики электрического кас- када.
постоянного тока определяется наибольшим напряжением на кольцах ротора, пропорциональным скольжению, и наибольшим током, зави- сящим от момента нагрузки.
При постоянном моменте нагрузки наибольшему напряжению в роторной цепи, обусловленному диапазоном регулирования, соот- ветствует наименьшая угловая скорость асинхронного двигателя и наибольший, равный номинальному, ток нагрузки (при независимой вентиляции).
В случае вентиляторной нагрузки наибольшему току нагрузки соответствует минимальное напряжение. Однако как при регулирова- нии с постоянным моментом, так и при регулировании с вентилятор- ным моментом установленные мощности преобразовательных агрега- тов будут одинаковы.
Активная мощность синхронного генератора определяется мак- симальной мощностью скольжения. Отсюда следует, что чем больше диапазон регулирования угловой скорости, тем больше установлен- ная мощность устройств в роторной цепи асинхронного двигателя, преобразующих мощность скольжения. Поэтому практический диа- пазон регулирования угловой скорости не превышает D = 2: 1; при этом суммарная установленная мощность вентильно-машинного элек-
трического каскада составляет 250% и разделяется так: 100% — основной асинхронный двигатель, 50 % — выпрямительный мост, 50 % — машина постоянного тока и 50 % — синхронный генератор. С увеличением диапазона регулирования угловой скорости возрастает установленная мощность каскада, достигая 400 %,
Регулирование угловой скорости может осуществляться только вниз от основной, поэтому этот тип каскада относится к приводам, обладающим однозонным регулированием. Плавность регулирования угловой скорости неограниченна, так как она определяется плав- ностью изменения тока возбуждения машины постоянного тока. Регу- лирование экономичное. Коэффициент полезного действия электро- привода при номинальной нагрузке и максимальной угловой скорости каскада составляет примерно 0,82—0,85 (уменьшаясь. с уменьшением нагрузки и угловой скорости). Коэффициент мощности собственно каскада при указанных условиях составляет 0,7—0,75, однако может
быть увеличен за счет перевозбуж- дения синхронной машины агрегата постоянной скорости.
Стабильность угловой скоро* сти определяется жесткостью ме- ханических характеристик и су- щественно выше, чем при реостат- ном и других видах параметриче-
Рис. 4.62. Принципиальная схема вентильно-машинного электромеха- нического каскада.
ского и импульсного регулирования, но хуже, чем при частотном управлении.
Принципиальная схема вентильно-машинного электромеханиче- ского каскада приведена на рис. 4.62. Как и в предыдущем случае, к сети переменного тока присоединяется статор асинхронного двига! теля M1, ротор которого механически связан с двигателем постоян- ного тока М2. Электрически якорь двигателя соединен через выпря- мительный мост с обмоткой ротора; реализуемая двигателем постоян- ного тока энергия скольжения за вычетом потерь возвращается на вал привода.
Регулирование угловой скорости привода осуществляется, как и в случае вентильно-машиниого электрического каскада, изменением добавочной ЭДС, создаваемой двигателем постоянного тока, в цепи выпрямленного напряжения.
Управляющим воздействием при регулировании угловой ско- рости является изменение тока возбуждения двигателя постоянного тока. С увеличением тока возбуждения снижается угловая скорость двигателей. Очевидно, что в электромеханическом каскаде ЭДС ма- шины постоянного тока зависит не только от тока возбуждения, но и от угловой скорости асинхронного двигателя, поскольку обе машины находятся на одном валу.
Электромагнитный момент, развиваемый каскадом, равен сумме моментов асинхронного двигателя и машины постоянного тока:
![]() (4.87)
(4.87)
Уравнение равновесия ЭДС роторной цепи
![]() (4.88)
(4.88)
Подставляя в (4.88) вместо Ем2=kФм2ω0(1 — s), находим сколь- жение асинхронного двигателя, соответствующее угловой скорости идеального холостого хода каскада (полагая Id = 0):
![]() (4.89)
(4.89)![]() (4.90)
(4.90)
Подставляя из (4. 90) значение тока в (4. 87), после преобразова- ний получаем:
 (4.91)
(4.91)
По аналогии с (4. 86) можно записать:
![]() (4.91а)
(4.91а)
Приведенное выражение для момента каскада справедливо при токах, соответствующих так называемому первому режиму работы схемы выпрямления.

Рис. 4. 63. Примерные механиче- ские характеристики вентильно- маши иного электромеханичес- кого каскада.
Из (4. 89) и (4. 91) следует, что с увеличением магнитного потока машины постоянного тока момент каскада возрастает, при этом угло- вая скорость его снижается. Примерные характеристики вентильно- машинного электромеханического каскада приведены на рис. 4. 63.
Без учета потерь в машинах мощность, отдаваемая асинхронным двигателем на вал, равна:
![]()
![]() (4.92)
где
p1
—
мощность, потребляемая из сети; s
— скольжение асинхрон-
ного
двигателя.
(4.92)
где
p1
—
мощность, потребляемая из сети; s
— скольжение асинхрон-
ного
двигателя.
Мощность скольжения, реализуемая двигателем постоянного тока и возвращаемая на вал каскада, равна:
Ps=P1s
Таким образом, суммарная мощность, развиваемая каскадом независимо от скольжения (и от угловой скорости), будет поддержи- ваться постоянной. Поэтому иногда вентильно-машинный электро- механический каскад называют каскадом постоянной мощности. При
этом следует иметь в виду, что поддержание постоянства мощности, а следовательно, возрастание момента каскада со снижением его угло- вой скорости может быть обеспечено соответствующим выбором ма- шин каскада и независимой их вентиляцией.
![]() (4.94)
(4.94)
Установленная мощность машины постоянного тока может быть найдена из равенства
откуда PM2=MM2ω0=P1s/(1-s)≈PM1s/(1-s) (4.95)
Уже при s = 0, 5 PM2 = PM1- с ростом скольжения, т. е, с уве- личением диапазона регулирования, мощность машины постоянного тока существенно возрастает по сравнению с мощностью РM1, что вытекает из (4. 95), поэтому диапазон регулирования ограничен прак- тически значением 2: 1. Вентильно-машинный каскад позволяет полу- чить плавное однозонное (вниз от основной) экономичное регулировав ние.
Коэффициент полезного действия каскада при регулировании угловой скорости и полной нагрузке составляет примерно 0,82—0,85, а коэффициент мощности асинхронного двигателя при номинальной угловой скорости и полной нагрузке составляет примерно 0,75—0,8. Стабильность угловой скорости примерно такая же, как и в случае электрического каскада.
В настоящее время электромеханический агрегат посто- янной скорости в электрическом каскаде заменяется инвер- тором. Принципиальная схема такого каскада, называе- мого асинхронно-вентильным (АВК), приведена на рис. 4. 64. Здесь асинхронный двигатель М подключен со стороны статора к сети переменного тока, роторная цепь его через выпрямитель В, инвертор И и согласующий трансформа- тор Т присоединяется к той же питающей сети. Для сгла- живания выпрямленного тока и нормальной работы инвер- тора включен реактор L. Принцип действия этого каскада аналогичен действию вентильно-машинного каскада и со- стоит в том, что в цепь выпрямленного тока ротора вво- дится добавочная ЭДС, получаемая регулированием угла β опережения включения тиристоров инвертора.
Ток в роторной цепи
![]() (4.96)
(4.96)
где Еdо = 1, 35E2к; Еd0и — ЭДС холостого хода инвертора при β= 0, Еd0и = 2,34 E2Ф,Т; E2Ф,Т — ЭДС фазы трансфор- матора; ΣΔU — суммарное падение напряжения в венти- лях роторной и инверторной групп преобразователя; Rэ — эквивалентное сопротивление, приведенное к роторной цепи:
![]()
xТ, RT — соответственно индуктивное и активное сопротив- ления фазы трансформатора, приведенные к цепи ротора; rl — активное сопротивление реактора.
Уравнение для момента асинхронного двигателя оказы- вается аналогичным полученному для электрического вен- тильно-машинного каскада (4. 83). Ток ротора равен:
![]() (4.97)
(4.97)
здесь е == Edoи/Ed0; λ=ΣΔU/Ed0
Из (4. 97) при Id = 0, пренебрегая ΔU, находим:
![]() (4.98)
(4.98)
где
![]()
 (4.99)
(4.99)

Рис. 4. 64. Принципиальная схе- Рис. 4. 65. Примерные механи-
ма асинхронно-вентильного кас- ческие характеристики асиы-
када. , хронно-вентильнога каскада.
токов, а также различных режимов работы выпрямителя, в которых внешняя характеристика выпрямителя резко падает.
Примерные механические характеристики АВК пока- заны на рис. 4. 65 (момент выражен в долях максимального момента двигателя в естественной схеме включения). Из
них видно, что при некотором угле β перегрузочная способ- ность АВК падает. Регулировочные свойства АВК при уменьшении угловой скорости ограничены некоторым допу- стимым по условиям устойчивой работы инвертора мини- мальным углом β и током инвертирования.
Максимальная угловая скорость АВК при номинальном моменте составляет примерно 0,9ω0; минимальная угловая скорость практически принимается равной 0,5ω0. Даль- нейшее снижение угловой скорости приводит к увеличе- нию установленной мощности всех силовых элементов,

включенных в роторную цепь, точно так же, как и в электрическом вентиль- но-машинном каскаде.
Регулирование угловой скорости в АВК однозон- ное (вниз от основной), плавное бесступенчатое, экономичное. КПД асин- хронно-вентильного кас-
Рис. 4. 66. Примерная зависи- мость коэффициента мощности от скольжения для асинхронно- вентильного каскада небольшой мощности.
када достигает 0,82—0,9 при максимальной угловой скоро- сти и тем выше, чем больше его мощность. При снижении угловой скорости КПД падает. Если КПД сравнительно высок, то коэффициент мощности АВК оказывается низ- ким, что обусловливается значительным суммарным потреб- лением реактивной мощности двигателем и инвертором и искажением тока инвертором. Коэффициент мощности зависит не только от нагрузки, но и от угловой скорости асинхронного двигателя. Примерная зависимость cos φк от скольжения и момента М* = М/Мном для АВК небольшой мощности дана на рис. 4.66.
Стабильность угловой скорости АВК хуже, чем у вен- тильно-машинного электрического каскада. Регулирование осуществляется при независимой вентиляции с постоянным (номинальным) моментом нагрузки.
Следует отметить, что в рассмотренных схемах каскадов двигатель может работать в двигательном режиме при ско-
роста ниже синхронной, в режимах противовключения, динамического торможения и генераторном параллельно с сетью при скорости выше синхронной. При этом энергия скольжения рекуперируется в сеть. Двигатель не может работать в генераторном режиме при скорости ниже син- хронной и двигательном режиме при сверхсинхронной ско- рости, когда энергия должна поступать из сети в ротор, что невозможно при нереверсивном неуправляемом выпря- мителе в роторной цепи. Эти режимы могут быть реализо- ваны в машине двойного питания.