

4. 12. Частотное регулирование асинхронных электроприводов
Принципиальная возможность регулирования угловой скорости асинхронного двигателя изменением ча- стоты питающего напряжения вытекает из формулы ω= = 2πf1(1-s)/p. При регулировании частоты также воз- никает необходимость регулирования амплитуды напря- жения источника, что следует из выражения U1≈Е1= =kФf1Если при неизменном напряжении изменять ча- стоту, то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении частоты поток возрастет и это приведет к насыщению стали машины и как следствие к резкому увеличению тока и превышению температуры двигателя; при увеличении частоты поток будет умень- шаться и как следствие будет уменьшаться допустимый момент.
Для наилучшего использования асинхронного двига- теля при регулировании угловой скорости изменением ча- стоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки, что реализуемо только в замкнутых системах электропривода. В разомкнутых системах напряжение регулируется лишь в функции ча- стоты по некоторому закону, зависящему от вида нагрузки.
Частотное регулирование угловой скорости электропри- водов переменного тока с двигателями с короткозамкнутым ротором находит все большее применение в различных от- раслях техники. Например, в установках текстильной промышленности, где с помощью одного преобразователя
частоты, питающего группу асинхронных двигателей, на- ходящихся в одинаковых условиях, плавно и одновременно регулируются их угловые скорости. Примером другой уста- новки с частотно-регулируемыми асинхронными двигате- лями с короткозамкнушм ротором могут служить транс- портные рольганги в металлургической промышленности, некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхрон- ных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (для привода электрошпинделей в ме- таллорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования осо- бенно существенны для приводов, работающих в повторно- кратковременном режиме, где имеет место частое измене- ние направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой скорости находят применение преобразователи, на выходе которых по требуемому соотношению или независимо ме- няется как частота, так и амплитуда напряжения. Преобра- зователи частоты можно разделить на электромашинные и вентильные. В свою очередь электромашинные преобразо- ватели могут быть выполнены с промежуточным звеном постоянного тока и непосредственной связью. В последних используют коллекторную машину переменного тока, на вход которой подают переменное напряжение с постоянной частотой и амплитудой, а на выходе ее получают напряжение с регулируемой частотой и амплитудой. Электромашинные преобразователи с непосредственной связью практического применения не получили.
Принципиальная схема электромашинного преобразо- вателя с промежуточным звеном постоянного тока, в кото- ром используется синхронный генератор, показана на рис. 4.44. Преобразователь состоит из агрегата постоян- ной скорости (Ml, G1), предназначенного для преобразова- ния переменного тока сетевого напряжения и неизменной частоты в регулируемое постоянное напряжение, которое зависит от тока возбуждения генератора постоянного тока G1.. Двигатель постоянного тока М2 агрегата переменной скорости получает питание от генератора G1. При измене- нии напряжения на выводах генератора G1 плавно регули- руется угловая скорость двигателя М2 и одновременно уг- ловая скорость синхронного генератора G2. Изменение угло-
вой скорости генератора G2 при неизменном токе его воз- буждения приводит к пропорциональному изменению скорости, частоты и амплитуды напряжения генерато- ра G2.
От синхронного генератора G2, являющегося источни- ком напряжения с переменной частотой и амплитудой, пи- тается один или группа асинхронных двигателей с корот- козамкнутым ротором МЗ — М5. Меняя направление тока возбуждения генератора постоянного тока G1, можно изме- нять направление вращения асинхронных двигателей. При неизменном токе возбуждения синхронного генератора G2

Рис. 4. 44. Принципиальная схема электромашинного преобразователя частоты с промежуточным звеном постоянного тока с использованием синхронного генератора,
и двигателя постоянного тока М2, меняя его угловую ско- рость, можно автоматически регулировать выходное напря- жение по закону U2/f2 = const. В данном случае, как будет показано далее, со снижением частоты снижается перегру- зочная способность асинхронных двигателей и поэтому диапазон регулирования при постоянном моменте нагрузки заметно уменьшается. Больший диапазон регулирования с обеспечением необходимой перегрузочной способности (по отношению к статическому моменту нагрузки) может быть получен при вентиляторной нагрузке.
Угловая скорость двигателя постоянного тока М2 при номинальной ЭДС генератора G1 может быть увеличена за счет уменьшения тока возбуждения двигателя М2 с по- мощью резистора R2, при этом частота и амплитуда напря-
жения синхронного генератора G2 также возрастают, но допустимый момент двигателя М2 уменьшается.
Независимо от частоты (угловой скорости) синхронного генератора G2 амплитуда напряжения на его выходе может регулироваться только вниз от номинального зна- чения.
Если мощность, потребляемая асинхронными двигате- лями от источника регулируемой частоты, равна Рном, то при пренебрежении потерями в машинах общая установлен- ная мощность преобразователя частоты составит:
![]()
С учетом потерь энергии в машинах преобразователя частоты его установленная мощность будет превышать че- тырехкратное значение установленной мощности нагрузки, что является недостатком электромашинного преобразова- теля частоты. Другим его недостатком является низкий КПД, определяемый произведением КПД отдельных ма- шин. Если, например, КПД каждой машины при полной нагрузке принять равным 0,9, то номинальный КПД преоб- разователя составит 0,94 = 0,66. С уменьшением нагрузки и при регулировании угловой скорости двигателей МЗ — М5 вниз от основной КПД становится еще меньше.
Регулирование частоты связано с преодолением значи- тельной механической и электромагнитной инерционности, которой обладает электромашинный преобразователь.
В схемах электромашинного преобразователя частоты могут быть использованы в качестве основного преобразо- вателя обычные асинхронные машины с фазным ротором в режиме асинхронного преобразователя частоты. Одна - из таких схем с асинхронным преобразователем частоты АПЧ приведена на рис. 4.45. Здесь статор АПЧ присоединен к сети переменного тока через автотрансформатор AT, позволяющий независимо регулировать на входе (и выходе) АПЧ амплитуду напряжения. Ротор АПЧ механически свя- зан с якорем двигателя М2, угловая скорость которого регулируется по системе Г—Д так же, как и в предыду- щей схеме с синхронным генератором. Вторичная (ротор- ная) цепь АПЧ служит источником напряжений регулируе- мой частоты и амплитуды.
Частота на выходе АПЧ равна:
![]() (4.66)
(4.66)
где fв.p = ωр/2π; ω — скорость двигателя М2; f1 — частота напряжения питания статора, принятая равной частоте питающей сети.
В (4.66) знак плюс относится к случаю, когда ротор вращается против поля статора, а знак минус — согласно с полем статора. Следовательно, при вращении ротора против поля частота f2 > f1, согласно с полем f2 < ft. При неподвижном состоянии ротора АПЧ частота f2=f1
Энергия, передаваемая АПЧ нагрузке, при вращении против поля складывается из механической энергии, посту-
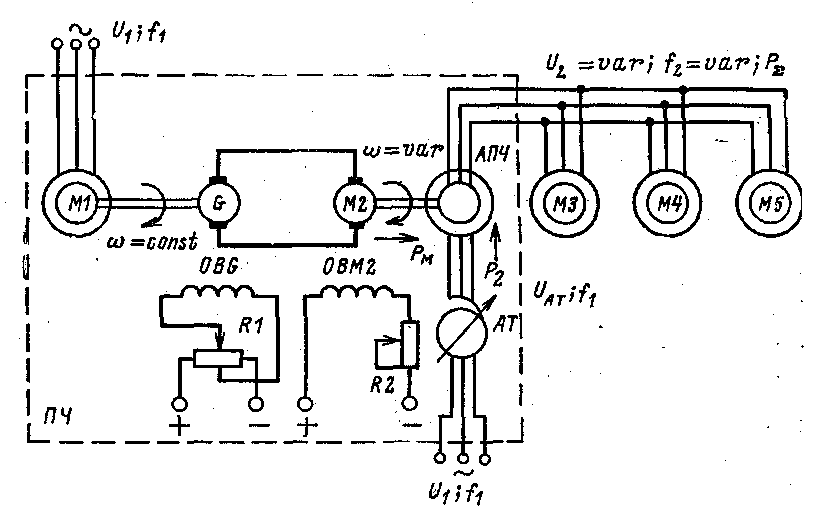
Рис. 4. 45. Схема с асинхронным преобразователем частоты.
пающей с вала двигателя М2, и электрической энергии, потребляемой АПЧ со стороны автотрансформатора AT. При вращении по полю электрическая энергия, поступаю- щая в статор АПЧ, частично передается нагрузке, а часть — двигателю М2, в этом случае работающему в генераторном режиме. Эта часть энергии после преобразований возвра- щается в сеть с помощью машины Ml.
Распределение активных мощностей, поступающих с вала двигателя постоянного тока Рм и со стороны питающей сети Р2, происходит (без учета потерь в АПЧ) пропорцио- нально частотам статора и ротора, т. е.
![]() (4.67)
(4.67)
![]() (4.68)
(4.68)
или
![]()
где P∑ — суммарная мощность, потребляемая на выходе АПЧ.
Если, например, принять частоту на выходе АПЧ f2 = 100 Гц, а частоту питания f1 = 50 Гц, то активная мощ- ность Р2 составит только 50 % установленной мощности нагрузки, а через двигатель М2 будет подводиться также 50 % P∑. Таким образом, при указанном соотношении ча- стот установленная мощность машин системы Г—Д окажется вдвое меньше, чем в случае электромашинного преобразо- вателя с синхронным генератором. Раздельное регулирова- ние напряжения с помощью автотрансформатора AT дает возможность (ограничиваемую насыщением стали АПЧ) устанавливать требуемое соотношение между U2 и f2.
Если установленную мощность асинхронных двигателей (нагрузки АПЧ) принять равной Рном, то, пренебрегая по- терями в машинах преобразовательного агрегата, можно найти установленную мощность преобразователя частоты (при f2 = 100 Гц и f1 = 50 Гц):
![]()
С возрастанием выходной частоты АПЧ установленная мощность преобразовательного устройства увеличивается.
Электромашинные преобразователи частоты с АПЧ при- меняются обычно для получения частот, превышающих частоту питающей сети, когда необходимо регулировать угловую скорость большого числа согласованно работаю- щих асинхронных двигателей е короткозамкнутым ротором.
Схема вентильно-элект-ромашинного преобразователя ча- стоты с синхронным генератором (вместо него может быть использован и АПЧ) приведена на рис. 4.46. Здесь вращаю- щийся преобразовательный агрегат постоянной скорости заменен статическим управляемым преобразователем (вы- прямителем) УП, собранным, например, на тиристорах. От управляемого выпрямителя питается двигатель M1 агрегата переменной скорости. В данном случае несколько- повышается КПД преобразователя частоты ПЧ, сокраща- ются его габариты. Однако остаютсяч такие недостатки» как невысокая надежность, необходимость в использова- нии, кроме УП двух машин (двигателя M1 и генератора G), значительная инерционность привода, связанная с изме-
нением угловой скорости агрегата переменной скорости при изменении выходной частоты.
Указанные недостатки ограничивают применение элек- тромашинных преобразователей и приводят к необходи- мости создания статических преобразователей на основе использования тиристоров или транзисторов.
По структуре схемы статических преобразователей ча- стоты сходны с аналогичными схемами электромашинных преобразователей и могут быть представлены двумя основ- ными классами: 1) с непосредственной связью и 2) с проме- жуточным звеном постоянного тока.

Рис. 4. 46. Схема вентильно-электромашинного преобразователя ча- стоты с синхронным генератором.
Преобразователь с непосредственной связью предназна- чен для преобразования высокой частоты в низкую и состоит из 18 тиристоров, объединенных во встречно-параллельные группы с раздельным управлением (рис. 4.47). В основе преобразователя лежит трехфазная нулевая схема выпрям- ления; каждая фаза преобразователя состоит, из двух та- ких, встречно включенных выпрямителей. Группу из трех вентилей, имеющих общий катод, называют положительной или выпрямительной, а группу с общим анодом — отрица- тельной или инверторной. Вентильные группы могут управ- ляться раздельно либо совместно.
Во избежание короткого замыкания управляющие им- пульсы при раздельном управлении должны подаваться на тиристоры одной из вентильных групп в соответствии с на- правлением тока в нагрузке. Для обеспечения раздельной работы применяется специальное логическое устройство, исключающее возможность прохождения тока в одной группе в то время, когда ток проходит в другой группе.
В преобразователях с совместной работой вентильных групп необходимо. включение дополнительных реакторов, ограничивающих уравнительный' ток между вентилями каждой группы, а углы управления положительной и отри- цательной групп изменяются по определенному закону, исключающему появление постоянной составляющей урав- нительного тока. Преобразователи с совместным управле- нием работой вентильных групп обладают большой установ- ленной мощностью силовых элементов.
В течение одного полупериода выходного напряжения преобразователя пропускают ток выпрямительные группы,

Рис. 4. 47. Преобразователь частоты с непосредственной связью.
а в течение другого — инверторные. Выходное напряжение состоит из отрезков волн напряжения питающей сети. На рис. 4.48 показана кривая выходного напряжения при не- изменном угле включения вентилей α = 0. Фазовая комму- тация вентилей в одной группе, т. е. включение одного вен- тиля и выключение другого, происходит подобно переклю- чению в трехфазной нулевой схеме выпрямления без комму- тирующих конденсаторов. Для получения выходного на- пряжения, близкого по форме к синусоидальному, необ- ходимо изменять угол включения вентилей таким образом, чтобы среднее за полупериод питающей сети значение на- пряжения изменялось в течение полупериода выходного напряжения по синусоидальному закону. Регулирование
напряжения на выходе преобразователя достигается изме- нением угла включения вентилей.
К достоинствам этого типа преобразователей можно отнести: 1) однократное преобразование энергии и, следо- вательно, высокий КПД (около 0,97—0,98); 2) возможность независимого регулирования амплитуды напряжения на вы- ходе от частоты; 3) свободный обмен реактивной и активной энергией из сети к двигателю и обратно; 4) отсутствие ком- мутирующих конденсаторов, так. как коммутация тиристо- ров производится естественным путем (напряжением сети. )
К недостаткам рассмотренного преобразователя частоты относятся: 1) ограниченное регулирование выходной ча- стоты (от 0 до 40 % частоты сети); 2) сравнительно большое число силовых вентилей и сложная схема управления ими;

Рис. 4. 48. Форма выходного напряжения трехфазного преобразова- теля частоты с непосредственной связью.
3) невысокий коэффициент мощности — максимальное зна- чение на входе преобразователя около 0, 8).
Преобразователь частоты с непосредственной связью можно использовать в случаях, когда, частота питающей сети много выше частоты нагрузки (например, если питаю- щая сеть имеет частоту 400 Гц, а двигатель серийного использования рассчитан на 50 Гц). Этот же преобразова- тель может быть применен в случае использования тихоход- ного безредукторного привода, когда возникает необходи- мость в плавном регулировании угловой скорости (напри- мер, в приводе шаровых мельниц, где номинальная угловая скорость двигателя соответствует 12—15 Гц и регулируется вниз; при этом частота питающей сети составляет 50 Гц). Кроме того, данный тип преобразователя целесообразно применить для регулирования угловой скорости асинхрон- ного двигателя с фазным ротором, работающего в режиме двойного питания, когда статор его присоединен к сети, а ротор питается от той же сети через преобразователь частоты.
Наибольшее применение для промышленных приводов может иметь статический преобразователь частоты с проме- жуточным звеном постоянного тока, структурная схема ко- торого приведена на рис. 4.49. Преобразователь состоит из двух силовых элементов — управляемого выпрямителя УВ и инвертора И. На вход УВ подается нерегулируемое на- пряжение переменного тока промышленной частоты; с вы- хода УВ постоянное регулируемое напряжение подается на инвертор И, который преобразует постоянное напряжение в переменное регулируемой амплитуды и частоты. Кроме
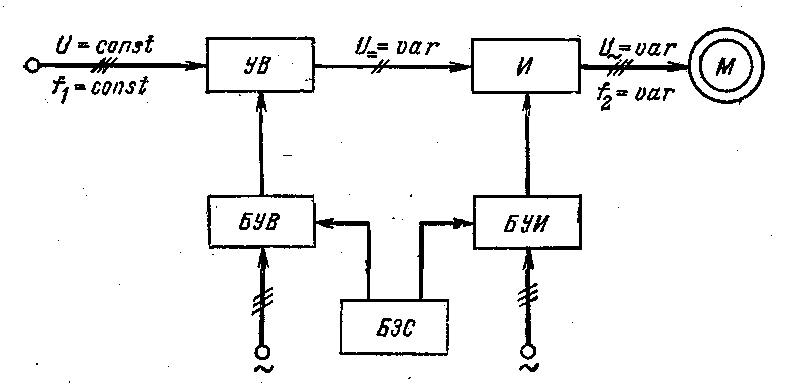
Рис. 4.49. Структурная схема статического преобразователя частоты с промежуточным звеном постоянного тока.
УВ — управляемый выпрямитель; И — инвертор: БУВ, БУИ — соответ- ственно блок управления выпрямителем и инвертором; БЗС— влок задания скорости.
двух силовых элементов, преобразователь содержит еще систему управления, состоящую из блока управления вы- прямителем БУВ и блока управления инвертором БУИ. Выходная частота регулируется в широких пределах и опре- деляется частотой коммутации тиристоров инвертора, кото- рая задается блоком управления инвертором БУИ. В такой схеме производится раздельное регулирование амплитуды и частоты выходного напряжения, что позволяет осущест- вить при помощи блока задания скорости БЗС требуемое соотношение между действующим значением напряжения и частотой на зажимах асинхронного двигателя.
Преобразователь с промежуточным звеном постоянного тока позволяет регулировать частоту как вверх, так и вниз от частоты питающей сети; он отличается высоким КПД (около 0, 96), значительным быстродействием, малыми габа-
ритами, сравнительно высокой надежностью и бесшумен в работе.
Примером принципиальной силовой схемы статического преобразователя частоты с промежуточным звеном постоян- ного тока, выполненного на тиристорах для привода неболь- шой мощности (до 5 кВт), может служить схема, приведен- ная на рис. 4.50 *.
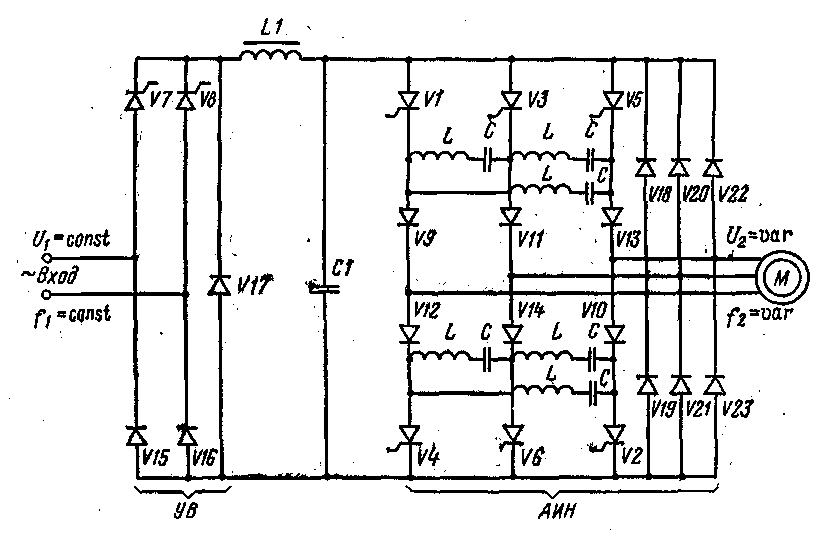
Рис. 4. 50. Схема статического преобразователя частоты с промежуточ- ным звеном постоянного тока. -
В качестве управляемого выпрямителя используются два тиристора (V7 и V8) и два диода (V15 и V16), включен- ные в так называемую полууправляемую мостовую схему для получения двухполупериодного выпрямленного напря- жения, среднее значение которого можно регулировать обычным способом, воздействуя на угол включения тиристо- ров V7 и V8.
Автономный инвертор напряжения (АИН) (рис. 4.50) состоит из шести тиристоров (VI — V6), шести последова- тельно включенных с ними диодов (V9 — V14) и шести дио- дов, включенных по трехфазной мостовой схеме (VI8 — V23) и, наконец, шести колебательных контуров LC.
* Схема разработана в проблемной лаборатории электромеханики МЭИ.
Преобразование постоянного напряжения в трехфазное переменное осуществляется коммутацией тиристоров V1 — V6, работающих в определенной последовательности. Время открытого состояния каждого тиристора составляет 2/3 полупериода выходного напряжения (длительность откры- того состояния тиристоров равна 120°); последователь- ность включения тиристоров отвечает их нумерации по схеме, т. е. сначала включается V1, через 60° включается V2 и т. д. до V6. После V6 вновь V1 и т. д. через каждую 1/6 периода выходного напряжения. В каждый момент времени вне коммутации открыты одновременно два тиристора. Включение тиристоров осуществляется подачей положи- тельного импульса на управляющий электрод от БУИ. Для выключения тиристоров необходимо ток, протекающий через него, довести до нуля. Это достигается с помощью коммутирующих контуров LC; например, при включении V3 через ранее открытый V1 происходит разряд конденса- тора С и V1 закрывается.
Выходное напряжение при чисто активной нагрузке имеет ступенчатую форму (рис. 4.51), и длительность каж- дой ступени соответствует 1/6 периода выходного напряже- ния.
При питании от преобразователя асинхронного двига- теля форма выходного напряжения искажается и зависит от коэффициента мощности, который в свою очередь опреде- ляется нагрузкой на валу двигателя.
Диоды V8 — V14 служат для отделения коммутирующих конденсаторов от нагрузки, что дает возможность сущест- венно снизить их емкость по сравнению с обычным парал- лельным инверторрм. Через мост V18 — V23 реактивная энергия двигателя возвращается конденсатору C1. Напряже- ние на выходе инвертора регулируется изменением напря- жения на его входе — управляемым выпрямителем, а часто- та — изменением частоты подачи импульсов на тиристоры.
Достоинствами однофазной схемы выпрямления явля- ется меньшее количество тиристоров по сравнению с трех- фазной схемой выпрямления, а также более простое управ- ление, что снижает стоимость преобразователя. Поэтому при небольшой мощности привода и малом диапазоне регу- лирования напряжения целесообразно использовать одно- фазный выпрямитель, хотя пульсации выпрямленного на- пряжения получаются довольно большими, что требует применения сглаживающего реактора значительной индук- тивности.
Для преобразователей большей мощности (от 20 кВт и выше) с относительно большим диапазоном регулирования выпрямленного напряжения (до 20: 1) используются трех- фазный полностью управляемый выпрямитель, обычно вы- полняемый по мостовой схеме.
При больших диапазонах регулирования напряжения целесообразно для средней мощности преобразователя (до 20 кВт) применять мостовую схему с трехфазным полу- управляемым выпрямителем, который содержит три тири- стора и три диода. В данном случае схема оказывается более простой по сравнению с полностью управляемым вы- прямителем.
В тех случаях, когда инвертор питается от сети постоян- ного тока или от неуправляемого выпрямителя, приме-

Рис. 4. 51. Форма выходного на- Рис. 4. 52. Схема ШИР напря-
пряжения при чисто активной жения.
нагрузке.
няется широтно-импульсный регулятор (ШИР) напряже- ния. Одна из возможных схем такого регулятора дана на рис. 4.52. На схеме приняты обозначения: V2 — вспомога- тельный тиристор; L1 — ограничивающий реактор; L2, С — реактор и конденсатор коммутирующего контура. При подаче импульса на V1 напряжение источника питания прикладывается к нагрузке. Для отключения нагрузки от источника питания подается импульс на включение V2. Среднее значение напряжения на выходе регулятора пропор- ционально относительному времени (скважности) включе- ния силового тиристора V1, частота коммутации которого должна быть высокой (около 800 Гц) для уменьшения габа-наьливать на выходе регулятора, вреднее напряжение на нагрузке:
![]() (4.70)
(4.70)
где tвкл — время включенного состояния V1; f — частота
лереключения тиристоров; в — скважность выходного на- пряжения.
Системы с ШИР могут обеспечить большой диапазон ре- гулирования выходного напряжения и позволяют умень- шить габариты фильтрующих устройств. Питание инвер- тора от неуправляемого выпрямителя через ШИР позволяет получить высокий коэффициент мощности на входе преобра- зователя частоты во всем диапазоне регулирования. Недо- статками преобразователя частоты с ШИР на входе ин- вертора являются необходимость установки силового тири- стора, рассчитанного на всю мощность, потребляемую ин- вертором, снижение КПД преобразователя из-за дополни- тельного преобразования энергии (потери мощности в ШИР), усложнение схемы преобразователя и снижение его надеж- ности, поэтому ШИР на входе инвертора используется в ос- новном только при наличии сети постоянного тока.
В случае применения в преобразователях частоты авто- номных инверторов напряжения с фазной или индивидуаль- ной коммутацией тиристоров или транзисторных инверто- ров можно совместить в самом инверторе функции инверти- рования и регулирования напряжения методом широтно-им- пульсной модуляции (ШИМ). Такиетиристорные инверторы и их системы управления существенно сложнее рассмотрен- ных инверторов с межфазной коммутацией, а КПД их ниже из-за повышенных потерь, связанных с высокой часто- той коммутации тиристоров.
Несмотря на этот недостаток инверторы с индивиду- альной и фазовой коммутацией тиристоров (и транзистор- ные) используются в весьма перспективных преобразовате- лях частоты с инверторами с ШИМ, применяемых в приво- дах с глубоким регулированием скорости. Отличитель- ной особенностью этих инверторов является не только возможность регулирования в них как напряжения, так и частоты от нуля до номинального значения, но и полу- чение формы выходного тока, близкой к синусоидальной. Зто позволяет в таких системах обеспечить весьма широкий диапазон регулирования угловой скорости асинхронного двигателя и уменьшить потери в нем от высших гармоник напряжения. При использовании инверторов с ШИМ отпа- дает необходимость в источнике регулируемого выпрям- ленного напряжения, что упрощает силовую схему и позво- ляет получить коэффициент мощности преобразователя, близкий к единице. Рассмотрим принцип действия такого инвертора (рис. 4.53, а). Нагрузка zн присоединяется к ис-
точнику питания с напряжением Е/2 с помощью ключа К, переключаемого с высокой частотой из положения 1 в поло- жение 2 и наоборот. Если время Δt1 нахождения ключа в по- ложении 1 равно времени Δt2 нахождения ключа в положе- нии 2, то среднее значение напряжения на нагрузке за пе- риод несущей частоты равно нулю. Когда Δt1 ≠Δt2, то (рис. 4.53, б) среднее значение напряжения на нагрузке за период несущей частоты равно:
![]() (4.71)
(4.71)
где τ = Δt1 + Δt2 — период несущей частоты; Δt1, Δt2— соответственно время нахождения ключа К. в положениях 1 и 2.

Рис, 4. 53. К пояснению принципа действия инвертора с ШИМ.
а — эквивалентная схема однофазного инвертора с синусоидальной ШИМ; б — график напряжения и тока регулируемой частоты в нагрузке при по- стоянной несущей частоте и неизменном выпрямленном напряжении на входа инвертора.
Если при постоянной несущей частоте изменить соотно- шения между Δt1и Δt2по синусоидальному закону (Δt1 — —Δt2)/τ = µ sin Ωt, то среднее значение напряжения на на- грузке за период несущей частоты также будет меняться по синусоидальному закону (uнf на рис. 4.53, б) с частотой мо- дуляции:
![]() (4.72)
(4.72)
здесь Ω — круговая частота модуляции (выходная частота); µ, — коэффициент глубины модуляции, показывающий, в ка- ких пределах изменяется длительность интервалов Δt1 и Δt2 в течение периода частоты модуляции.
При µ = 1 Δt1 и Δt2изменяются от 0 до τ и амплитуда среднего значения напряжения на нагрузке равна E/2. Таким образом, изменяя µ и Ω, можно осуществлять неза- висимое регулирование амплитуды и частоты напряжения
на нагрузке при постоянной несущей частоте и неизмен- ном выпрямленном напряжении (рис. 4.53, б).
Принципиальная схема однофазного инвертора, работа- ющего в режиме синусоидальной ШИМ, приведена на рис. 4.54. Здесь тиристоры VI и V2 коммутируются с по- мощью конденсаторов С1 и С2 и реактора L так, что при открывании тиристора V2 закрывается тиристор V1 и на- оборот. Так как тиристоры обладают односторонней прово- димостью, то для пропускания обратного тока служат ди- оды V3 и V4. При формировании положительной полуволны тока проводит тиристор VI и ток нагрузки потребляется от верхней половины источника питания. Когда открывается тиристор V2 (закрывается тиристор VI) и ток нагрузки про- текает в непроводящем направлении по отношению к тири- стору V2, открывается тиристор V4 и ток возвращается

в нижнюю половину источника питания. После изменения полярности тока в нагрузке проводит тиристор V2, а во время его закрытого состояния — диод V3. Когда открыт тиристор V2, ток нагрузки потребляется из нижней поло- вины источника питания, при открытом диоде V3 ток воз- вращается в верхнюю половину.
Простейшая схема трехфазного преобразователя частоты с инвертором, работающим по принципу ШИМ, приведена на рис. 4.55. Преобразователь состоит из мостового неуправ- ляемого выпрямителя (1/7 — V12) и автономного инвертора из шести тиристоров (VI — V6) и шести обратных диодов (VI' — V6'), предназначенных для передачи реактивной мощности от двигателя М к конденсатору С. Конденсаторы С1 — С6 и реакторы L1 — L3 осуществляют коммутацию тиристоров. Частота на выходе преобразователя может регулироваться от 0 до 50 Гц и выше при практически сину- соидальной форме тока в нагрузке. Выходное напряжение также регулируется от нуля до максимального значения, определяемого постоянным напряжением на входе инвер- тора.
По сравнению с простейшей схемой на рис. 4.55, в кото- рой из-за высокой частоты переключения тиристоров между тиристорным мостом и мостом обратного тока устанавли- вается постоянно циркулирующий уравнительный ток,

Рис. 4. 55. Простейшая схема трехфазного преобразователя частоты с инвертором, работающим по принципу ШИМ.
приводящий к снижению КПД и бесполезной загрузке вен- тилей, лучшими показателями обладает инвертор с двухсту- пенчатой коммутацией, схема которого приведена на рис. 4. 56.

Рис. 4. 56. Схема инвертора с двухступенчатой коммутацией.
При регулировании напряжения на выходе инвертора с поочередной коммутацией тиристоров (см. рис. 4.50) коммутирующая способность инвертора снижается пропор- ционально уменьшению напряжения на входе инвертора (коммутирующая способность характеризуется максималь- ным током нагрузки, который он способен коммутировать).
Коммутирующая особенность инверторов с ШИМ остается постоянной, так как напряжение на его входе, а следова- тельно, и напряжение на коммутирующих конденсаторах остается неизменным.
Однако потери в инверторах с ШИМ вследствие высокой частоты коммутации (несущая частота обычно в 8—10 раз превышает максимальную выходную частоту) выше, чем в инверторах с поочередной коммутацией. С другой стороны, при питании двигателей напряжением ступенчатой формы, которое имеет место в инверторах с поочередной коммута- цией, КПД двигателя снижается из-за несинусоидальной формы напряжения примерно на 1,5—2 %. В случае инвер- тора с ШИМ потери в двигателе от высших гармоник меньше. Суммарные потери в частотно-управляемом приводе с ин- вертором с ШИМ оказываются несколько выше, чем в пре- образователе с поочередной коммутацией.
Система управления инвертором с ШИМ сравнительно сложнее системы управления АИН с поочередной коммута- цией.
Инверторы с ШИМ могут найти широкое применение в си- стемах электроснабжения, имеющих питающую сеть посто- янного тока, где к тому же может быть использовано реку- перативное торможение (например, троллейбус, трамвай и др. ).
Следует отметить, что при использовании преобразова- телей частоты по схемам на рис. 4.46, 4.50, 4.55, 4.57 допу- стимы только двигательный режим работы привода и дина- мическое торможение. Торможение противовключением в схемах с преобразователями частоты обычно не использу- ется из-за больших токов. Для реализации рекуперативного торможения необходимо усложнять схему выпрямителя, выполняя его реверсивным.
В результате рассмотрения тиристорных преобразовате- лей частоты Можно наметить рекомендации по их примене- нию. Выбор типа преобразователя зависит от типа привода и режима его работы, а также от частоты и напряжения на входе и выходе преобразователя. При частоте питающей сети 50 Гц и выходной частоте до 25—12,5 Гц целесообразно применять преобразователи с непосредственной связью с устройствами на его входе, повышающими коэффициент- мощности.
При выходной частоте 50 Гц. и ниже или выше могут быть использованы преобразователи с автономным инвер- тором, причем: 1) для индивидуальных и взаимосвязанных
нереверсивных приводов средней и малой мощности (от 200 кВт до долей киловатт) при диапазоне регулирования частоты до 20 : 1 (для высокоскоростных приводов с номи- нальной частотой от 100 до 2500 Гц) — преобразователь с АЙН; 2) для индивидуальных реверсивных и нереверсив- ных приводов и особенно приводов, работающих в повтор- но-кратковременном режиме, с диапазоном изменения ча- стоты до 20 : 1 независимо от мощности преобразователя — преобразователь с автономным инвертором тока (АИТ) *;

Рис. 4. 57. Принципиальная силовая схема преобразователя частоты на транзисторах с промежуточным звеном постоянного тока.
3) для индивидуальных и взаимосвязанных приводов, реверсивных и нереверсивных, с диапазоном регулирования частоты свыше 20 : 1 независимо от мощности — преобра- зователь с АИН с ШИМ (АИН—ШИМ), отличающийся, как упоминалось, от преобразователей с АИН и АИТ высо- ким коэффициентом мощности.
В последнее время в связи с разработкой более мощных транзисторов, рассчитанных на напряжение до 1000 В и на ток в несколько десятков и даже сотен ампер, стало воз- можным производство транзисторных преобразователей ча- стоты. На рис. 4.57 показана принципиальная силовая схема преобразователя частоты на транзисторах с промежуточным звеном постоянного тока и с ШИР. Напряжение от неуправ- ляемого мостового выпрямителя регулируется ШИР, вы-
* Более подробно преобразователь с АИТ рассматривается в гл. 6.
полненным с помощью транзистора VI, затем через фильтр LC подается на инвертор. Транзисторный преобразователь частоты более экономичен и надежен, чем тиристорный, из-за меньшего числа переключающих элементов. Эти пре- образователи могут выполняться и с инверторами с ШИМ. В этом случае количество элементов сокращается еще более резко по сравнению с тиристорным АЙН—ШИМ. При той же схеме инвертора, что и на рис. 4.57, можно реализовать ШИМ и убрать из схемы преобразователя ШИР и реактор L.
Транзисторные преобразователи частоты для регулируе- мых электроприводов малой и средней мощности являются более перспективными, чем тиристорные.
Для выявления свойств асинхронного двигателя при ча- стотном управлении предполагаем, что преобразователь

Рис. 4. 58. Схема замещения асинхронного двигателя при частотном регулировании.
обладает неограниченной мощностью, выходное напряже- ние которого симметрично и синусоидально. Такое представ- ление преобразователя позволяет выявить предельные воз- можности асинхронного двигателя и получить достаточно простые закономерности.
Анализ характеристик асинхронного двигателя при ча- стотном управлении можно произвести, использовав схему замещения, приведенную на рис. 4.58. На схеме приняты следующие обозначения:
2)
параметр абсолютного скольжения или
относитель-
ная частота ротора:
![]()
![]()
где ω1ном — синхронная угловая скорость при номинальной частоте f1ном,
параметр β используется вместо скольжения s и связан с ним отношением
![]()
здесь ω1 — синхронная угловая скорость при частоте f1; 3) относительное напряжение на статоре
![]()
Момент, развиваемый двигателем,
![]() (4.73)
(4.73)
При подстановке в (4.73) выражения для тока I΄2a, наи- денного из расчета токов в схеме замещения двигателя (рис. 4. 58):
![]() (4.74)
(4.74)
![]()
![]()
![]()
после преобразований получим формулу для момента двигателя:
 (4.75)
(4.75)
здесь b = R1(1 + τ 2); с= x0τ ; d = R1/x0; e = 1 + τ 1 где τ1 и τ 2 — коэффициенты рассеяния соответственно для статора и ротора, τ1 =x1/x0 и τ2= x΄2/x0; τ - обший коэф- фициент рассеяния,
![]()
а максимальный момент
 (4.77)
(4.77)
![]() (4.76)
(4.76)
Анализ выражения (4.77) показывает, что при сравни- тельно больших частотах, когда значением R1 по сравнению с хк =x1 + х'2 можно пренебречь, максимальный момент двигателя при изменении частоты постоянен Мка = = const, если напряжение изменяется пропорционально частоте, т. е. γ = α или U/f — const.
При дальнейшем снижении частоты активное сопротив- ление статора R1 становится соизмеримым со значением хк и максимум момента двигателя снижается (рис. 4.59). Это

происходит как вследствие уменьшения потока двига- теля из-за увеличивающей- ся доли падения напряже- лия на R1 от общего при- ложенного напряжения, так и уменьшения абсолют- ного критического сколь- жения, определяемого фор- мулой (4.76), что приводит
Рис. 4. 59. Механические харак- теристики асинхронного двига- теля при частотном управлении по закону U/f = const.
даже при неизменном потоке к уменьшению момента вслед- ствие уменьшения тока ротора в соответствии с выраже- нием М = kФI΄2cos ψ2.
Для поддержания достаточной перегрузочной способно- сти во всем диапазоне регулирования необходимо при ма- лых частотах уменьшать напряжение в меньшей степени, чем снижается частота.
 (4.78)
(4.78)
Однако управление по этому закону связано с увеличением
потока двигателя в точке максимума момента примерно обратно пропорционально √βка,,что приводит к насыщению стали двигателя в случае большего диапазона регулирования. Поэтому применение закона (4.78) ограничи-
вается диапазоном регулирования частоты вниз от номи- нальной до (3 -:- 7): 1.
Диапазон регулирования угловой скорости определя- ется статизмом, который может быть допущен при малой угловой скорости.
Если момент нагрузки принять равным Мном = const; βс = βном и управлять двигателем по закону (4.78), то ста- тизм при малой угловой скорости по аналогии с приводом постоянного тока можно определить:
![]()
где βном — номинальное скольжение; Dα = f1ном/f1— диа- пазон регулирования частоты.
Например, задаваясь допустимым статизмом δ = 0, 1 и полагая для двигателей средней мощности рном =v = 0, 03 -:- 0, 05, получаем максимальный диапазон регулиро- вания двигателя (с принудительной [вентиляцией) равным
Dαmax≈(3-:-2):1.
Регулирование ниже основной скорости может произво- диться с постоянным моментом нагрузки, если двигатель имеет независимую вентиляцию. В тех случаях, когда используется самовентилируемые двигатели, у которых со снижением скорости уменьшается теплоотдача, допусти- мая нагрузка должна быть снижена при длительной работе на низких скоростях. При частотном регулировании ско- рости и номинальном моменте потери уменьшаются за счет снижения потерь в стали, что позволяет в меньшей мере сни-ч жать его нагрузку, чем при других способах регулирова- ния. О коэффициенте завышения мощности в связи с ухуд- шением теплоотдачи при снижении скорости см. § 4. 9.
При вентиляторной нагрузке в разомкнутой системе, уиравляемой по закону U/f = const, диапазон регулирова- ния может быть значительно расширен до Damax≈(20 -:- 10): 1 при δ = 0,1. В этом случае может быть использо- ван самовентилируемый двигатель без завышения его уста- новленной мощности.
Обычно для вентиляторной нагрузки рекомендуется за» кон управления γ = α2 или U1/f12 = const, получаемый из квадратичной зависимости момента нагрузки от угловой скорости н квадратичной зависимости максимального мо- мента идеализированного двигателя (R1 = 0) от напряже- ния и частоты. Применимость этого более экономичного, но более сложного для реализации закона ограничивается
из-за принятых идеализации двигателя и нагрузки (в ко- торой не учтена постоянная составляющая момента) диапа- зоном регулирования до 2: 1. При больших диапазонах целесообразно использовать закон γ= α.
Частотное регулирование при изменении частоты и соот- ветственно подводимого к. статору напряжения может про- изводиться не только ниже основной угловой скорости, но и частично (в соответствии с допустимым превышением угло- вой скорости над синхронной по условиям механической прочности) выше основной.
Регулирование угловой скорости выше основной обычно производится при постоянной мощности нагрузки. При ре- гулировании угловой скорости вниз от основной потребу- ется завышение установленной мощности двигателя с неза- висимой вентиляцией пропорционально диапазону регули- рования, что экономически нецелесообразно. Для нагрузки с постоянной мощностью рекомендуется закон экономич- ного регулирования γ=√α, или U1/√f1=const, полу- ченный аналогично случаю вентиляторной нагрузки. При- менение этого закона при регулировании угловой скорости вверх от основной требует завышения установленной мощ- ности преобразователя частоты пропорционально √Dα. где Dα=f1max/f1ном Поэтому обычно при диапазоне регулиро- вания до 2: 1 вверх от основной угловой скорости регули- рование производят при неизменном номинальном напря- жении, т. е. U1=U1ном=const. В этом случае в первом приближении поток двигателя и допустимый момент убы- вают обратно пропорционально увеличению частоты, что соответствует нагрузке, но перегрузочная способность дви- гателя уменьшается обратно пропорционально √Dα.
В замкнутых системах частотного управления могут быть получены характеристики требуемого качества в диапазоне регулирования 10 000: 1 и более.
Частотное регулирование угловой скорости является эко- номичным, так как управление двигателем производится при малых скольжениях. Кроме того, в замкнутых системах можно управлять двигателем, достигая минимума потерь в нем или минимума потребляемого двигателем тока или экстремума других энергетических показателей, так как имеется возможность регулировать напряжение в функции нагрузки. Частотное регулирование угловой скорости обычно плавное, бесступенчатое. Но оно требует примене- ния относительно сложного преобразователя.
Большим достоинством частотного регулирования яв- ляется возможность реализации высоких регулировочных свойств, не уступающих приводу постоянного тока, в элек- троприводе с бесконтактным асинхронным двигателем с ко- роткозамкнутым ротором — наиболее простым, надежным и дешевым электрическим двигателем.