

3.8. Механические характеристики
асинхронного двигателя в тормозных режимах
В § 3.7 были рассмотрены механические характеристики асинхронной машины, работающей в двигательном режиме. Однако асинхронный двигатель может работать и в тормозных режимах: при торможении с отдачей энергии в сеть, при торможении противовключением и при динамическом торможении.
1 .
Торможение
с отдачей энергии в сеть (генераторный
режим
работы параллельно с сетью) возможно
при скорости
выше синхронной. Механические
характеристики асинхронного двигателя
в координатах
М
и
ω
представлены
на рис. 3.30. В квад ранте
I
расположены участки характеристик
двигательного
.
Торможение
с отдачей энергии в сеть (генераторный
режим
работы параллельно с сетью) возможно
при скорости
выше синхронной. Механические
характеристики асинхронного двигателя
в координатах
М
и
ω
представлены
на рис. 3.30. В квад ранте
I
расположены участки характеристик
двигательного
Р ис.
3.30. Механические характеристики
асинхронного двигателя для
различных режимов работы.
ис.
3.30. Механические характеристики
асинхронного двигателя для
различных режимов работы.
режима для трех различных сопротивлений роторной цепи. По мере приближения скорости двигателя к скорости идеального холостого хода, или синхронной скорости, момент двигателя приближается к нулю.
При дальнейшем увеличении угловой скорости под влиянием внешнего момента, когда ω > ω 0, двигатель работает в режиме генератора параллельно с сетью, которой он может отдавать электрическую энергию, потребляя при этом реактивную мощность для возбуждения. Торможению с от-
дачей энергии в сеть отвечают участки характеристик, расположенные в верхней части квадранта II. В этом режиме, как видно из (3.38), максимальный момент имеет большее значение, чем в двигательном. Режим торможения с отдачей энергии в сеть применяется практически для двигателей с переключением полюсов, а также для приводов грузоподъемных машин (подъемники, экскаваторы и т. п.) и в некоторых других случаях.
2. Торможение противовключением имеет значительно большее применение на практике. Режим торможения про тивовключением может быть получен, так же как и для дви гателя постоянного тока, при движущем моменте нагрузки MС > МП (рис. 3.30). Для ограничения тока и получения соответствующего момента необходимо при использовании двигателя с фазным ротором в его роторную цепь включить дополнительный резистор. Установившемуся режиму при торможении противовключением соответствует, например, точка — ω уст, Мс на характеристике Rp2 (рис. 3.30).
Механическая характеристика для Rp1 в режиме торможения противовключением и MС = const не обеспечивает устойчивой работы. Торможение противовключением может быть получено также путем переключения на ходу двух фаз обмотки статора, что ведет к перемене направления вращения магнитного поля (переход из точки А в точку В на рис. 3.31). Ротор при этом вращается против направления движения поля и постепенно замедляется. Когда угловая скорость спадет до нуля (точка С на рис. 3.31), двигатель нужно отключить от сети, иначе он может вновь перейти в двигательный режим, причем ротор его будет вращаться в направлении, обратном предыдущему (точка D).
3. Динамическое торможение асинхронного двигателя осуществляется обычно включением обмотки статора на сеть постоянного тока; обмотка ротора при этом замыка ется на внешние резисторы. Для перехода из двигательного режима в режим динамического торможения контактор К1 (рис. 3.32) отключает статор от сети переменного тока, а контактор К2 присоединяет обмотку статора к сети посто янного тока. Для ограничения тока и получения различных тормозных характеристик в цепи ротора предусмотрены внешние резисторы.
Проходя по обмотке статора, постоянный ток образует неподвижное поле, основная волна которого дает синусоидальное распределение индукции. Во вращающемся роторе возникает переменный ток, создающий свое поле, которое
также неподвижно относительно статора. В результате взаимодействия суммарного магнитного потока с током ротора возникает тормозной момент, который зависит от МДС статора, сопротивления ротора и угловой скорости двигателя. Механические характеристики для этого режима приведены в нижней части квадранта II (см. рис. 3.30). Они проходят через начало координат, так как при угловой скорости, равной нулю, тормозной момент в этом режиме также равен нулю. Максимальный момент пропорционален квадрату приложенного к статору напряжения1 и возрастает с ростом напряжения. Критическое скольжение зависит от

Рис. 3.31. Механические характеристики асинхронного двигателя при переключении двух фаз статора.
Рис. 3.32. Схема включения асинхронного двигателя для перехода на режим динамического торможения.
сопротивления роторной цепи. Оно увеличивается пропорционально росту сопротивления. Максимальный момент при этом не изменяется. На рис. 3.30 характеристики динамического торможения даны для трех различных сопротивлений цепи ротора и одном и том же токе статора.
На рис. 3.33, а—е представлены различные схемы включения обмоток статора при питании их от источника постоянного тока. В схемах на рис. 3.33, д, е нагрузка всех фаз обмотки статора равномерна, однако схема переключе ния статора сложна. Более простыми, часто применяемыми на практике являются схемы на рис. 3.33, а, б.
Питание обмоток статора асинхронных двигателей для осуществления динамического торможения может произво-
1 Последнее справедливо при условии
пренебрежения насыщением.
Последнее справедливо при условии
пренебрежения насыщением.
диться от сети переменного тока через полупроводниковый выпрямитель В, как это показано на рис. 3.34.
Анализ работы асинхронного двигателя в режиме динамического торможения целесообразно произвести, считая, что статор питается не постоянным, а эквивалентным трехфазным переменным током Iэкв. Эта замена предполагает равенство МДС, созданных постоянным током и эквива-

Рис. 3.33. Схемы включения обмоток статора асинхронного двигателя при динамическом торможении.
л![]() ентным
переменным током. Амплитуда МДС,
создаваемойпеременным
током,
ентным
переменным током. Амплитуда МДС,
создаваемойпеременным
током,
где w1 — число последовательно соединенных витков фазы статора.
М![]() агнитодвижущая
сила, создаваемая постоянным током,пропорциональна
постоянному току, числу витков фазы
статора
и зависит от схемы соединения. Например,
при соединении
статора в звезду и прохождении постоянного
тока только
по двум фазам (рис. 3.33) МДС постоянного
тока, определяемая
геометрической суммой МДС двух фаз,
равна:
агнитодвижущая
сила, создаваемая постоянным током,пропорциональна
постоянному току, числу витков фазы
статора
и зависит от схемы соединения. Например,
при соединении
статора в звезду и прохождении постоянного
тока только
по двум фазам (рис. 3.33) МДС постоянного
тока, определяемая
геометрической суммой МДС двух фаз,
равна:
Исходя из равенства Fn = F, определяют значение эквивалентного переменного тока для рассматриваемого
случая: ![]()
Определив эквивалентный ток, можно построить упрощенную векторную диаграмму токов для асинхронного двигателя при динамическом торможении (рис. 3.35). На диаграмме İμ — ток намагничивания; İμ0 — наибольшее значение намагничивающего тока; 1'2 — вторичный ток, приведенный к статору; İэкв — первичный эквивалентный ток; Ė1, Ė'2 — соответственно первичная и вторичная приведенная ЭДС.
Намагничивающий ток İ определяется геометрической суммой эквивалентного тока İэкв и вторичного приведенного
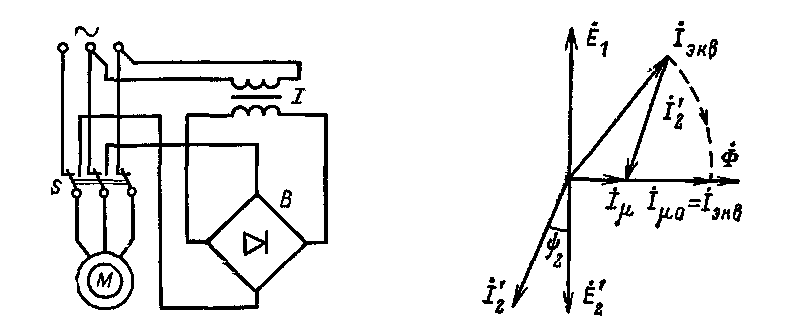
Рис. 3.34. Схема включения асин- Рис. 3.35. Векторная диаграмма
хронного двигателя при динами- для асинхронного двигателя в
ческом торможении с питанием режиме динамического тормо
статора через полу проводки ко- жения. вый выпрямитель,
к статору тока ротора; с изменением скорости ротора изменяется вторичный ток. Конец вектора тока İэкв при уменьшении скорости ротора будет перемещаться по окружности вправо и при неподвижном роторе вектор İэкв совпадет с İμ, так как вторичная ЭДС и соответственно вторичный ток окажутся равными нулю. Поэтому при малых скоростях ротора и сравнительно большом эквивалентном токе двигатель в режиме динамического торможения оказывается с сильно насыщенной магнитной системой. Наоборот, при больших угловых скоростях и том же эквивалентном токе магнитная система будет ненасыщенной. Примерная зависимость Iμ = f[s (ω)] приведена на рис. 3.36.
В связи с явлением насыщения магнитной системы не остается постоянной и реактивность намагничивания Хμ (рис. 3.36).
Из диаграммы (см. рис. 3.35)
![]()
(3.43)
 (3.44)
(3.44)
где Е'20 — приведенная вторичная ЭДС при синхронной угловой скорости ω0 двигателя и намагничивающем токе Iμ (вторичная ЭДС может быть найдена по кривой намагничивания двигателя); Хμ= Е'20/ Iμ — реактивность намагничи-

вания; s = ω/ω0 — скольжение при динамическом торможении.
Решая совместно (3.43) и (3.44), находим:
![]() (3.45)
(3.45)
Электромагнитный момент, развиваемый двигателем,
 (3.46)
(3.46)
Если предположить в первом приближении машину ненасыщенной, то в (3.46) Хμ = const и М будет функцией s, так как другие параметры принимаются постоянными, поэтому, дифференцируя М по s и приравнивая производную нулю, находим:
sK,T = R'2/(Xμ+X'2), (3.47)
при котором момент имеет максимум:
 (3.48)
(3.48)
После несложных преобразований (3.46) принимает вид:
![]() (3.49)
(3.49)
Уравнение (3.49) по своей структуре аналогично уравнению механической характеристики асинхронного двигателя в двигательном режиме.
Отметим, что критическое скольжение в двигательном режиме существенно больше критического скольжения в ре-

ж име
динамического торможения при том же
сопротивлении
цепи ротора, т. е.
име
динамического торможения при том же
сопротивлении
цепи ротора, т. е.
вследствие
того что Хμ
![]() Х1.
Х1.
Кроме того, в реальных условиях в связи с уменьшением Хμ, и ростом Iэкв критическое скольжение sk,t не остается постоянным для различных Iэкв; следует учесть также, что кривая М = f (s) при динамическом торможении может быть построена графо-аналитическим методом с учетом насыщения, для чего должны быть заданы ток Iэкв и зависимость Е1 = f (Iμ).
Иногда применяют торможение с самовозбуждением, подключая к статору конденсаторную батарею, например, по схеме, приведенной на рис. 3.37. В этом случае машина работает асинхронным генератором, получая намагничивающий ток от конденсаторов C1, C2, СЗ. Возбуждаясь со стороны статора, машина при определенной угловой скорости генерирует энергию, выделяемую в виде теплоты в роторной цепи. Подобные схемы торможения не нашли еще
широкого применения вследствие высокой стоимости конденсаторов.
На практике применяют чаще всего торможение противовключением, особенно когда требуется осуществить перемену направления вращения (реверс), или динамическое торможение по схемам, изображенным на рис. 3.32 и 3.34, когда реверс не требуется.