

7.5. Торможение противовключением и реверсирование двигателя постоянного тока независимого возбуждения
Торможение противовключением осуществляется при изменении полярности напряжения на выводах обмотки якоря, работающего двигателя и неизменном направлении тока в обмотке возбуждения. По схеме, приведенной на рис. 7.16, указанное переключение выполняется с помощью переключателя К, причем для ограничения тока, потребляемого из сети при торможении, в цепь якоря вводится дополнительный резистор R1.
Рисунок 7.17 иллюстрирует переход из двигательного режима в режим противовключения. В этом случае происходит торможение соответственно характеристике —МначО1. Если якорь двигателя при угловой скорости, равной или близкой к 0, не отключить, то двигатель, развивая момент, по абсолютному значению больший реактивного момента
сопротивления, разгонится в противоположном направлении до установившейся угловой скорости —ωуст [характеристика O1(—ωуст)], или под действием суммы моментов двигателя и нагрузки он разгоняется до скорости —ω'уст при активном моменте сопротивления. Процесс электрического торможения противовключением с последующим разгоном в обратном направлении и называется реверсированием.
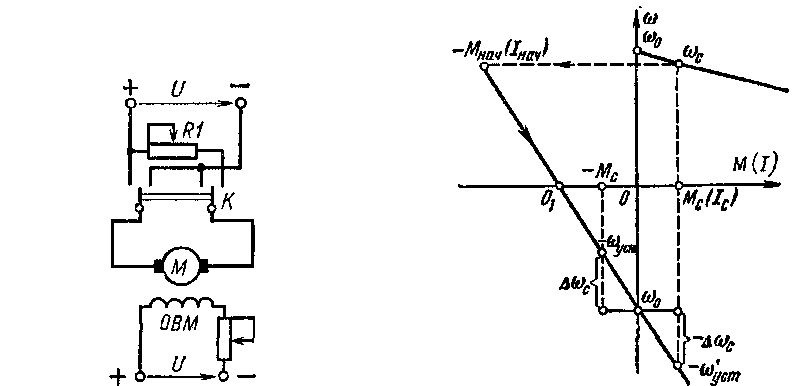
Рис. 7.16. Принципиальная схема торможения противовключе-нием и реверсирования двигателя постоянного тока независимого возбуждения.
Рис. 7.17. Механическая характеристика двигателя постоянного тока независимого возбуждения при переходе из двигательного режима в режим про-тивовключения.
Уравнение электрического равновесия для цепи якоря двигателя в период торможения противовключением
–U = cω + iR. (7.52)
Э![]() то
уравнение отличается от аналогичного
при пуске (7.1) тем, что передU
стоит знак минус. Поэтому можно
воспользоваться общим уравнением для
угловой скорости (7.4), заменив в нем +ω0
на —ω0,
тогда при реверсировании
то
уравнение отличается от аналогичного
при пуске (7.1) тем, что передU
стоит знак минус. Поэтому можно
воспользоваться общим уравнением для
угловой скорости (7.4), заменив в нем +ω0
на —ω0,
тогда при реверсировании
ω = —ωо–Δωс + С . (7.53)
Для t = 0 угловая скорость двигателя в момент переключения якоря ω = ωнач = ωс (рис. 7.17) и постоянная интегрирования С = ωс + ω0 + Δωс .
З![]() ависимостьω
= f
(t) при реверсировании определяется
выражением
ависимостьω
= f
(t) при реверсировании определяется
выражением
ω = — (ωо + Δωс) + (ω0 + Δωс + ωс) . (7.54)
Формула (7.54) получена в предположении постоянства знака Δωс с изменением направления вращения двигателя, т. е. момент нагрузки принят активным. В этом случае после реверсирования установившаяся угловая скорость двигателя превысит ω0 на значение Δωc. Зависимость ω = f (t) при активном моменте нагрузки представлена кривой 1 (рис. 7.18).
Для реверсирования без нагрузки (ωс = ω0 и Δωс = 0)
ω![]() = — ω0
+ 2ω0
.
(7.55)
= — ω0
+ 2ω0
.
(7.55)
Данному случаю соответствует кривая 2 на рис. 7.18. Если же реверсирование происходит с реактивным момен-

Рис. 7.18. Зависимость ω = f (t) при реверсировании двигателя постоянного тока независимого возбуждения.
Рис. 7.19. Зависимость i =f(t) при реверсировании двигателя постоянного тока независимого возбуждения.
том нагрузки, то кривая ω = f(t) в точке пересечения с осью абсцисс имеет излом и к установившейся угловой скорости —ωуст приближается асимптотически, как показано на рис. 7.18 (кривая 3). Расчет этой кривой производится на основании тех же исходных формул, но с учетом того обстоятельства, что при изменении знака угловой скорости момент нагрузки также изменит свой знак. Реактивный момент всегда препятствует движению, поэтому на участке торможения угловая скорость снижается под действием суммы моментов двигателя и нагрузки, а на участке разгона увеличение угловой скорости происходит под действием разности этих моментов.
Ток в цепи якоря двигателя при реверсировании определяется, как и в § 7.4. В окончательном виде ток равен:
i![]() = Ic–(Iнач+Iс) ,
(7.56)
= Ic–(Iнач+Iс) ,
(7.56)
где Iнач = (U + cωс)/R — абсолютное значение тока в начальный момент переключения из двигательного режима в режим торможения противовключением; R = Rя + R1— общее сопротивление якорной цепи.
Формула (7.56), так же как и (7.54), справедлива для случая активного момента нагрузки (кривая 1 на рис. 7.19). Эта формула также применима и для реактивного момента с начала торможения до остановки двигателя. В точке O1 кривая i = f (t) при реактивном моменте нагрузки будет иметь излом. К установившемуся значению тока —Iс кривая i = f (t) приближается асимптотически, как показано на рис. 7.19 (кривая 3).
При реверсировании без нагрузки
i![]() = — Iнач
, (7.57)
= — Iнач
, (7.57)
Так как в этом случае ωc = ωo, то
Iнач = 2U/R = 2Iк,з
и![]()
i = –2Iк,з . (7.58)
Зависимость i — f (t) при Мс = 0 иллюстрируется кривой 2 на рис. 7.19.