

7.4. Динамическое торможение двигателя постоянного тока независимого возбуждения
Если обмотку якоря работающего двигателя посредством переключателя К отключить от сети и замкнуть на дополнительный резистор R1 (рис. 7.13), то двигатель переходит в генераторный режим динамического торможения и снижает свою угловую скорость (рис. 7.14).
Обмотка возбуждения в процессе торможения остается присоединенной к сети постоянного тока.
Основные уравнения, характеризующие процесс динамического торможения:
сω + iR = 0; (7.42)
ci
= J
![]() +Mc
,
+Mc
,
где R = R1 +Rя .
С![]() овместное
решение этих уравнений относительноω
дает:
овместное
решение этих уравнений относительноω
дает:
ω = — Δωc + C , (7.43)
Постоянная интегрирования С определяется из начальных условий. При t = 0
ω = ωнач = ωс ;
С = ωнач + Δωс ,
где ω нач = ωс — угловая скорость двигателя в момент переключения с двигательного режима на динамическое тор-
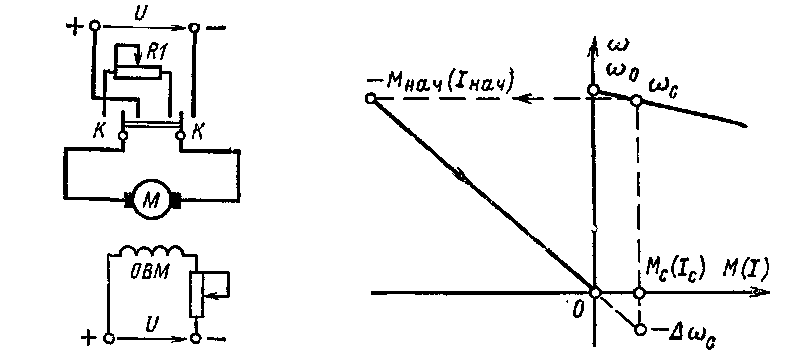
Рис. 7.13. Принципиальная схема динамического торможения двигателя постоянного тока независимого возбуждения.
Рис. 7.14. Механические характеристики двигателя постоянного тока независимого возбуждения при переходе из двигательного режима в режим динамического торможения.
можение; Δωс = McR/c2 — абсолютное значение перепада угловой скорости, определяемое по характеристике динамического торможения при моменте нагрузки Мс (рис. 7.14). После подстановки значения С в (7.43) получим:
ω![]() = — Δωс
+ (ω
нач
+ Δωс)
. (7.44)
= — Δωс
+ (ω
нач
+ Δωс)
. (7.44)
При динамическом торможении без нагрузки (Мс = 0) Δωс = 0 и ω нач = ω0, тогда
ω![]() = ω0
. (7.45)
= ω0
. (7.45)
На рис. 7.15, а показаны характеристики ω = f (t) при динамическом торможении в случае, когда торможение производится под нагрузкой (кривая 1) и когда Мс = 0 (кривая 2).
При торможении под нагрузкой кривая ω = f (t) асимптотически стремится к угловой скорости —Δωс, если момент нагрузки активный, например, в случае опускающегося груза в приводе крановой установки. Если момент нагрузки реактивный, то торможение электропривода закончится при угловой скорости ω = 0 (точка b).
При торможении без нагрузки кривая ω = f (t) асимптотически приближается к 0, начальная угловая скорость в атом случае ω нач = ω 0.

Рис. 7.15. Кривые ω = f (t) (а) и i = f1 (t) (б) при динамическом торможении двигателя постоянного тока независимого возбуждения.
Для определения i = f1 (t) можно воспользоваться формулой (7.8), если подставить в нее постоянную интегрирования С, соответствующую данным начальным условиям
С = сTм(Iнач + Iс) /J.
Т![]() огда
огда
i = – (Iнач + Iс) +Iс . (7.46)
На рис. 7.15, б кривая 1 иллюстрирует изменение тока в цепи якоря при динамическом торможении и наличии активной нагрузки на валу двигателя, которой соответствует ток Iс. При реактивном моменте процесс закончится в точке b при ω = 0.
Кривая 2 иллюстрирует процесс динамического торможения при Мс — 0. Ток в цепи якоря для этого случая определяется по формуле
i![]() = –Iнач
= –Iнач
![]() , (7.47)
, (7.47)
Абсолютное значение тока в момент переключения из двигательного режима в режим динамического торможения
Iнач = сωнач/R. (7.48)
В![]() ремя
торможения от начальной угловой скоростиωнач
до текущей ω1
может быть получено из (7.44), если решить
его относительно
t1
т. е.
ремя
торможения от начальной угловой скоростиωнач
до текущей ω1
может быть получено из (7.44), если решить
его относительно
t1
т. е.
t1 = Тм ln (7.49)
П![]() ри
торможении до полной остановки (ω1
= 0)
ри
торможении до полной остановки (ω1
= 0)
tт = Тм1n (7.50)
Когда Iс = 0; Δωс = 0 и теоретически время tт = ∞, практически процесс торможения можно считать законченным за время tт = 3TМ. Постоянная времени определяется аналогично тому, как это производилось в § 7.2. В данном случае учитывается суммарное сопротивление цепи якоря двигателя при динамическом торможении.
Время торможения может быть также определено на основании (7.46). Например, при торможении до полной остановки, когда i = 0, время торможения
t![]() т
= Тм1n (7.51)
т
= Тм1n (7.51)