

6.8. Автоматическое регулирование электроприводов переменного тока с частотным управлением
Диапазон и точность регулирования в замкнутых системах частотного управления, в которых напряжение, приложенное к двигателю, регулируется в функции нагрузки, значительно выше, чем в разомкнутых системах, где диапазон регулирования достигает не более 3:1 (см. гл. 4).
Распространенной системой частотно-регулируемого асинхронного привода является система со статическим преобразователем частоты с автономным инвертором.
Многообразие автономных инверторов можно разделить на два класса: инверторы напряжения и инверторы тока.
В случае автономных инверторов напряжения (АИН) в качестве управляющих воздействий приняты частота и напряжение на статоре двигателя, а в случае автономных инверторов тока (АИТ) может быть использован принцип частотно-токового управления, при котором основными управляющими воздействиями являются потребляемый статором ток и частота этого тока.
Существенным достоинством АИН является независимость выходного напряжения от частоты и от момента нагрузки. Выходное напряжение определяется лишь напряжением питания инвертора. Это упрощает формирование необходимого закона частотного регулирования, особенно когда напряжение регулируется только в функции частоты.
Однако если рассматривать систему в целом, т. е. АИН — Д, то при глубоком диапазоне регулирования
угловой скорости привода и произвольно меняющемся моменте нагрузки напряжение на двигателе должно регулироваться в функции двух параметров — частоты и момента. Такое регулирование может быть осуществлено в замкнутой системе управления. Практически реализация системы регулирования напряжения в функции момента нагрузки усложняется неоднозначностью закона регулирования при изменении частоты и трудностью получения информации о моменте на валу двигателя.
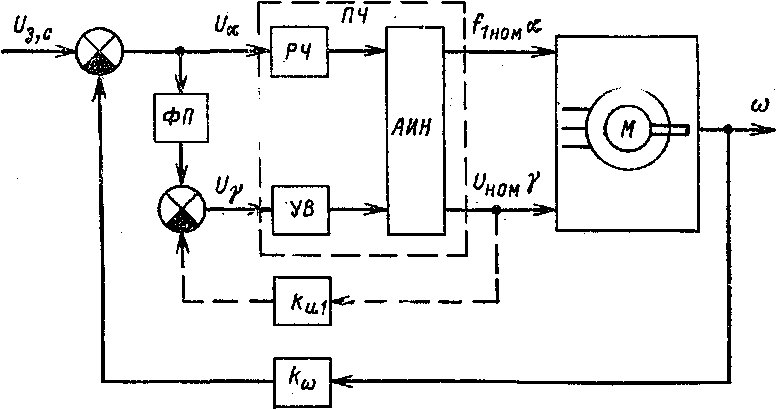
Рис. 6.12, Структурная схема замкнутой системы автоматического частотного регулирования с АИН с жесткой отрицательной обратной связью по угловой скорости в контуре стабилизации скорости.
Проанализируем основные особенности замкнутых систем частотного регулирования асинхронных двигателей с короткозамкнутым ротором, управляемых АИН.
В системах с жесткой отрицательной обратной связью по угловой скорости (рис. 6.12) одновременно создается воздействие на напряжение и частоту. Связь между регуляторами частоты РЧ и напряжения УВ происходит с помощью функционального преобразователя ФП, обеспечивающего требуемое соотношение между напряжением и частотой на статоре двигателя. На структурной схеме пунктиром показан внутренний контур стабилизации напряжения. Такая система обладает ограниченным диапазоном регулирования до 7:1 при Мс = const из-за уменьшения перегрузочной способности двигателя при низких частотах.
Стабилизация магнитного потока посредством жесткой отрицательной обратной связи по потоку двигателя Ф (рис. 6.13) путем регулирования напряжения на двигателе в функции частоты (с помощью ФП) и нагрузки обеспечивает механические характеристики двигателя с высокой перегрузочной способностью и жесткостью, соответствующей естественной характеристике.

Рис. 6.13. Структурная схема замкнутой системы автоматического частотного регулирования с АИН с жесткой отрицательной обратной связью по потоку в контуре стабилизации потока,
В![]() соответствии с рис. 6.13 магнитный
поток опре-
соответствии с рис. 6.13 магнитный
поток опре-
г де
(6.24)
де
(6.24)
П![]() реобразуя
(6.24) с учетом принятых ранее [см. (4.75)]обозначений,
находим:
реобразуя
(6.24) с учетом принятых ранее [см. (4.75)]обозначений,
находим:
(6.25)
г![]() де
де
Подставляя (6.25) в формулу момента Ма =
![]()
получаем выражение механической ха-
р![]() актеристики
двигателя в замкнутой системе с обратной
связью по потоку:
актеристики
двигателя в замкнутой системе с обратной
связью по потоку:
(6.26)
![]()
![]() Из выражения
магнитного потока
получаемого из схемы замещения,
и из (6.25) найдем, что напряжение на
двигателе в этой системе регулируется
согласно выражению
Из выражения
магнитного потока
получаемого из схемы замещения,
и из (6.25) найдем, что напряжение на
двигателе в этой системе регулируется
согласно выражению
(6.27)
Напряжение, подводимое к двигателю, нужно менять так, чтобы поток для всех частот и нагрузок оставался неизменным и равным потоку при номинальном напряжении и частоте и идеальном холостом ходе (Ф = Ф0).
Начиная с некоторого большого коэффициента усиления (k ≥ 100) максимальный момент двигателя в рассматриваемой системе при любой частоте остается практически постоянным и стремится к значению
 (6.28)
(6.28)
а критическое абсолютное скольжение
βка→R2’/x2’ . (6.29)
Из (6.28) и (6.29) видно, что предельные значения Мкa и βка не зависят от частоты и возрастают примерно в 2 раза по сравнению с максимальным моментом и критическим абсолютным скольжением на естественной характеристике.
Анализ замкнутой системы с обратной связью по потоку показывает незначительное уменьшение токов по сравне нию с разомкнутой системой (при одинаковых моментах нагрузки), но при, этом уменьшается коэффициент мощности ( примерно на 3-5 % по сравнению с номинальным при а = 1 и μ = 1 ).
![]() Максимальный
диапазон регулирования при М = Мном
= = const можно определить (при регулировании
вниз от номинальной угловой скорости)
по формуле
Максимальный
диапазон регулирования при М = Мном
= = const можно определить (при регулировании
вниз от номинальной угловой скорости)
по формуле
(6.30)
где βк,ном — критическое абсолютное скольжение в естественной схеме включения двигателя.
Принимая в среднем βк, ном = 0,10 ÷ 0,2 , получаем Damax = (20 ÷ 10) : 1, поэтому если есть необходимость в дальнейшем расширении диапазона регулирования, то
необходимо рассмотренную систему дополнить отрицательной обратной связью по скорости с воздействием на частоту и задающее напряжение контура стабилизации потока, как это показано пунктиром на рис. 6.13. Возможно также использование обратной связи по скорости и в контуре стабилизации потока.
В приводах, работающих с частыми переходными процессами, и в случаях, когда требуется генераторное торможение асинхронного двигателя с рекуперацией энергии в сеть, целесообразно использование преобразователя частоты с АИТ. В этих случаях сказываются преимущества АИТ, заключающиеся в возможности рекуперации энергии в сеть при более простой силовой схеме. При использовании АИН рекуперативное торможение асинхронного двигателя возможно при дополнительном параллельном подключении к управляемому выпрямителю инвертора, ведомого сетью, так как при переводе двигателя в генераторный режим в звене постоянного тока меняется направление тока при неизменной полярности напряжения.
В системе с АИТ и работе двигателя в генераторном режиме направление постоянного тока не меняется, а изменяется полярность напряжения в звене постоянного тока. Следовательно, для рекуперации энергии в сеть управляемый выпрямитель переводится в инверторный режим.
По сравнению с АИН схема с АИТ отличается отсутствием моста обратного (реактивного) тока, инвертора, ведомого сетью, и конденсатора фильтра в звене постоянного тока.
И![]() спользуя
схему замещения, приведенную на рис.
4.58,находим
связь между током I2’
и I1:
спользуя
схему замещения, приведенную на рис.
4.58,находим
связь между током I2’
и I1:
(6.31)
При этом электромагнитный момент двигателя :

(6.32)
 его магнитный
поток :
его магнитный
поток :
(6.33)
Анализ (6.32) и (6.33) показывает, что при неизменном
токе статора механические характеристики двигателя об-
ладают постоянной перегрузочной способностью при всех частотах как в двигательном, так и в генераторном режимах, а момент его и магнитный поток однозначно связаны с абсолютным скольжением и не зависят от частоты.
Однако при управлении с неизменным током статора машина приобретает неблагоприятные свойства, заключающиеся в том, что с увеличением нагрузки (скольжения) резко падает магнитный поток. Поэтому система должна быть замкнута таким образом, чтобы с увеличением нагрузки по определенному закону увеличивался и ток статора так, чтобы поток машины поддерживался постоянным.
Упрощенная схема системы частотно-токового управления асинхронным двигателем с АИТ представлена на рис. 6.14. В ней задающий сигнал Uз.с определяет частоту переключения тиристоров АИТ, а следовательно, частоту тока статора, если не вошло в зону ограничения устройство ограничения УО. После вычитания из напряжения Uз.с напряжения, пропорционального угловой скорости двигателя Uω, образуется сигнал абсолютного скольжения Uβ, который является управляющим (после прохождения через ФП) для контура регулирования тока. В этот контур входят управляемый выпрямитель УВ с системой управления СУВ, усилитель разностного сигнала У, сильная обратная отрицательная связь по току Ui, стабилизирующая ток на уровне, определяемом сигналом задания, и сигнал задания тока UIз, получаемый на выходе функционального преобразователя ФП. В данной схеме UIз = = k | β |. Следовательно, при всех частотах ток двигателя пропорционален скольжению.
Подставляя в (6.32) и (6.33) зависимость тока статора от скольжения (принимая ее линейной) I1 = kββ, получаем выражения для момента:

(6.34)
и магнитного потока:
магнитного потока:
(6.35)
где kβ — коэффициент пропорциональности между током и абсолютным скольжением.
При малых β поток почти пропорционален абсолютному скольжению. В области рабочих скольжений момент пропорционален β, а нарастание потока уменьшается.
При резких изменениях заданного сигнала в системе по рис. 6.14 или при перегрузках двигателя срабатывает ОУ (ограничивая на заданном уровне и задание тока). Система переходит в режим ограничения момента. Сигнал задания частоты в этом режиме определяется текущим

Рис. 6.14. Упрощенная схема системы частотно-токового управления асинхронным двигателем с АИТ.
значением угловой скорости и заданным ограничителем ОУ абсолютным скольжением. Двигатель работает при любой угловой скорости в этом режиме с постоянными значениями тока и абсолютного скольжения, что и определяет, как это следует из (6.32), постоянство момента, т. е. характеристика двигателя становится абсолютно мягкой.
На рис. 6.15 приведены примерные механические характеристики асинхронного двигателя с короткозамкнутым ротором мощностью 45 кВт, управляемого АИТ в системе по рис. 6.14. Характеристики в двигательном и гене-

раторном (рекуперативное торможение) режимах обладают жесткостью не ниже, чем естественная характеристика двигателя.
Система с АИТ позволяет регулировать угловую скорость в диапазоне примерно до (20—30) : 1.