

6.7. Автоматическое регулирование угловой скорости асинхронных электроприводов при помощи тиристорных регуляторов напряжения
Несмотря на то что в разомкнутой системе асинхронный двигатель не может работать на неустойчивой части механической характеристики, в замкнутой системе автоматического регулирования асинхронный привод может быть устойчивым, обеспечивая главное регулирование угловой скорости в сравнительно широком диапазоне.
Структурная схема асинхронного электропривода с регулированием угловой скорости при помощи тиристорного регулятора напряжения приведена на рис. 6.11, а. Здесь регулирование напряжения на статоре асинхронного двигателя производится тиристорным регулятором напряжения ТРН, угол а включения тиристоров которого изменяется системой управления СУ. На вход СУ подается сигнал от усилителя У; этот сигнал зависит от разности задающего напряжения U3 и напряжения отрицательной обратной связи по скорости, снимаемой с выводов тахогенератора, U0,с = ω, где — коэффициент передачи тахогенератора.
М еханические
характеристики в замкнутой системе
регулирования
располагаются в зоне между двумя
характеристиками в разомкнутой
системе (рис. 6.11, б).
Одна из этих характеристик соответствует
минимальному
углу включения тиристоров amin
= φ
(s),
равному
фазовому
углу нагрузки φ, который определяется
по схеме замещения двигателя
как:
еханические
характеристики в замкнутой системе
регулирования
располагаются в зоне между двумя
характеристиками в разомкнутой
системе (рис. 6.11, б).
Одна из этих характеристик соответствует
минимальному
углу включения тиристоров amin
= φ
(s),
равному
фазовому
углу нагрузки φ, который определяется
по схеме замещения двигателя
как:
(6.18)
![]()
где — индуктивное сопротивление цепи намагничивания.
Другая характеристика соответствует наибольшему углу включения атаx, примерно равному 135°. При таком угле момент, развиваемый двигателем, обычно меньше статического момента холостого хода двигателя Mx,x. Следовательно, при работе двигателя в замкнутой системе по мере увеличения его нагрузки угол включения а должен уменьшаться от некоторого максимального до минимального. Поэтому система управления тиристорами должна вырабатывать при отсутствии сигнала управления импульсы с углом включения a0 > amax, а с возрастанием сигнала управления по мере увеличения нагрузки двигателя и уменьшения его угловой скорости угол а должен уменьшаться. Такое действие системы управления отражает на рис, 6,11, а узел
сравнения на выходе СУ. В соответствии со структурной схемой можно
з![]() аписать
:
(6.19)
аписать
:
(6.19)
Используя это уравнение, можно рассчитать требуемые значения коэффициента усиления усилителя У и задающего напряжения U3, обеспечивающие необходимые значения угловой скорости и жесткости
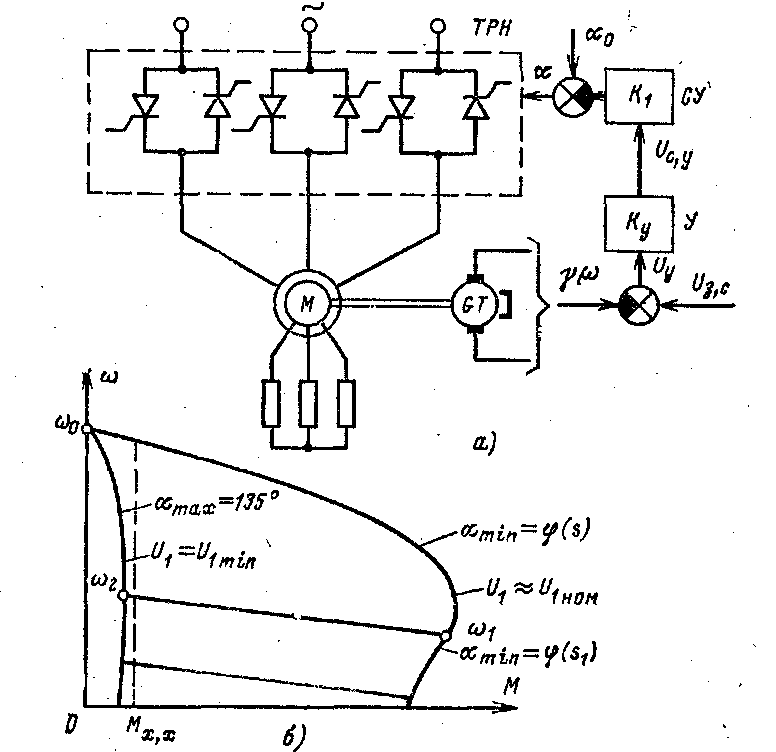
Рис. 6.11. Структурная схема асинхронного электропривода с регулированием скорости при помощи тиристорного регулятора напряжения (а) и механические характеристики (б).
механической характеристики двигателя при работе его в замкнутой системе регулирования. Задавшись крайними точками ω1 и ω2 механической характеристики (рис. 6.11, б), можно составить систему
![]() (6.20)
(6.20)
(6.21)
г![]() деs1
—
скольжение, соответствующее угловой
скорoсти
ω1,а
φ
(s1)
деs1
—
скольжение, соответствующее угловой
скорoсти
ω1,а
φ
(s1)
определяется по (6.18) .
(6.22)
Из (6.20) и (6.21) спедует
![]() (6.23)
(6.23)
Механические характеристики двигателя в этой системе регулирования строятся обычно графо-аналитическим способом с использованием универсальных кривых U1 = f (a, φ), графической зависимости φ =f1(s), определяемой (6.18), уравнения (6.19) и формулы момента двигателя М = f2 (U1,s).
Диапазон регулирования составляет для рассматриваемой системы (15 ÷20) : 1.
Напомним, что данный способ регулирования угловой скорости является неэкономичным и может быть использован в основном при кратковременном режиме работы.