

6.6. Автоматическое регулирование
скорости и момента в системе источник тока — двигатель
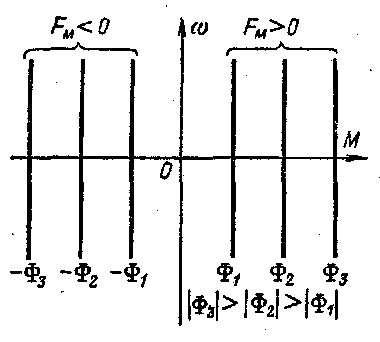
Рассмотренные ранее способы автоматического регулирования скорости и момента двигателя постоянного тока независимого возбуждения предполагают питание его от источника ЭДС, не зависящей от тока нагрузки. Рассмотрим схемы автоматического регулирования момента с питанием якорной цепи от источника тока, в котором задан ток, не зависящий от ЭДС и сопротивления нагрузки (допустим I = Iном). Обмотка возбуждения двигателя получает питание от источника регулируемого напряжения, полярность которого можно изменять. Механические характеристики такого привода представляют собой вертикальные прямые линии (рис. 6.7), т. е. являются абсолютно мягкими (момент не зависит от угловой скорости), а их положение (значение момента) определяется магнитным потоком, так как М = kФI = kIномФ = k1Ф.
Применение обратных связей в схеме источник тока — двигатель позволяет сформировать из вертикальных характеристик любые характеристики. Таким примером явля-
ется схема, приведенная на рис. 6.8. Здесь якорь двига- теля М подключен к источнику тока ИТ, а обмотка возбуждения ОВМ присоединена к усилителю У с линейной характеристикой, на входе которого две обмотки управления. Одна из них ОУ1 получает питание от потенциометра П1 и предназначена для создания сигнала, пропорционального потоку Fя = Iмωм (задание момента), другая ОУ2 — обмотка отрицательной обратной связи по скорости с сигналом Fо.с = Iо.сωо.с направленным встречно сигналу Fм.
Обмотка обратной связи ОУ2 присоединена к тахогенера-тору GT через потенциометр П2 и выпрямитель V так, что сигнал, пропорциональный скорости, появляется на ней тогда, когда ׀Етг׀>Uз. Меняя с помощью потенцио-
Рис. 6.7. Механические характеристики привода по системе источник тока — двигатель.
метра П2 задающее напряжение U3, можно регулировать уставку отсечки обратной связи по скорости, так как вентили V пропускают ток Ioc только в том случае, когда напряжение GT превосходит U3.
Результирующий сигнал на входе усилителя У:
![]() (6.15)
(6.15)
Полагая, что магнитный поток линейно зависит от тока возбуждения (Ф = kиIи), получаем (при I = Iном):
![]() (6.16)
(6.16)
где ky — коэффициент усиления усилителя У.
Пока не действует обратная связь по скорости (система разомкнута), двигатель развивает постоянный момент, пропорциональный сигналу, зависящему только от Fм (рис. 6.7). С помощью потенциометра П1 (рис. 6.8) можно изменять направление тока в обмотке управления ОУ1, следовательно, изменять знак момента.
Если вступает в действие обратная связь по скорости Fо.с > 0, результирующий сигнал FΣ становится меньше, а вместе с ним уменьшается и момент. Уравнение меха-
нической характеристики приобретает вид :
![]()
(6.17)
где ω0 = Fм /ko.c ;Δω = М/ko.cA.
На рис. 6.9 даны характеристики, соответствующие различным уставкам задающего напряжения U3 (ω1 и ω2) и Fм (М1 и М2).
Механические характеристики могут быть расположены в четырех квадрантах, если источник тока ИТ позволяет рекуперировать энергию в сеть.
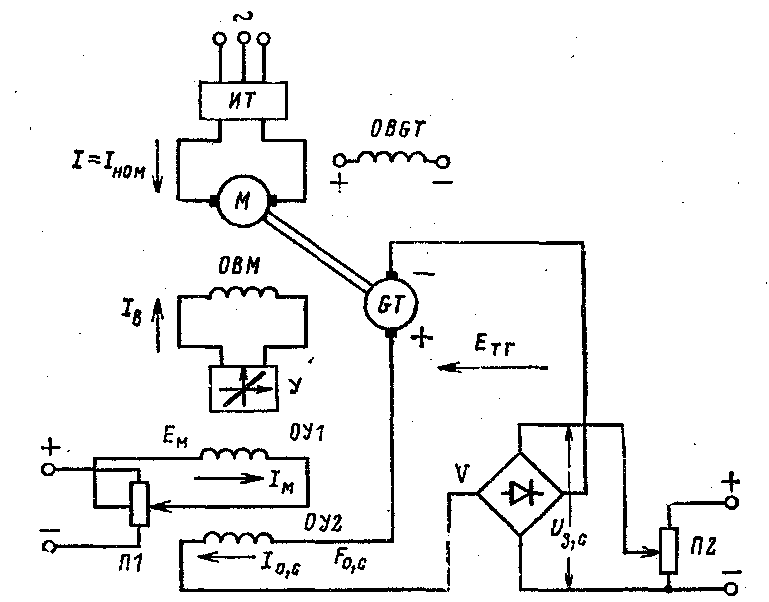
Рис. 6.8. Принципиальная схема системы источник тока — двигатель с обратными связями.
Наиболее простое устройство, работающее в режиме источника тока, — индуктивно-емкостный преобразователь (ИЕП). Схема привода с таким преобразователем показана на рис. 6.10. Индуктивно-емкостный преобразователь состоит из трех одинаковых реакторов с индуктивностью xl и трех конденсаторов с емкостным сопротивлением xc. Точки А, В и С присоединены к питающей сети переменного тока, a a, b и с к входу неуправляемого выпрямителя, нагрузкой которого является двигатель постоянного тока независимого возбуждения.
Принцип действия ИЕП основан на резонансе напряжений в цепи LC, в которой ток нагрузки не зависит от сопротивления нагрузки, а зависит от линейного напряжения питающей сети и реактивного сопротивления xl = Хс = = Xр.э ( где Xр.э — реактивное эквивалентное сопротивление),т. е. обладает свойством источника тока.
Рассмотренный неуправляемый преобразователь (ИЕП) в силовой цепи относительно прост и надежен, так как

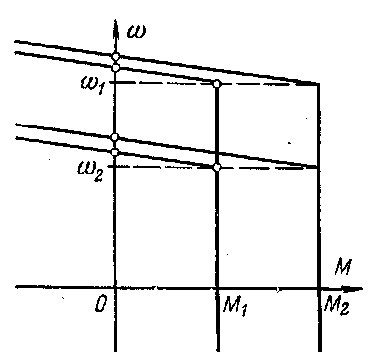
Рис. 6.9. Механические характеристики двигателя в системе источник тока — двигатель с обратной отрицательной связью по угловой скорости с отсечкой.
Рис. 6.10. Принципиальная схема электропривода с ИЕП.
не имеет вращающихся частей; он обладает хорошими технико-экономическими показателями (высокие КПД и cos φ). Диапазон регулирования (50—100):1 и зависит от коэффициента усиления усилителя. Система обеспечивает высокую» стабильность и плавность регулирования угло-. вой скорости.
К недостаткам схемы следует отнести невозможность получения рекуперативного торможения; торможение осуществляется противовключением, для чего служит ограничивающий резистор Rт. Регулирование момента ограничено
значением (1 1,2) Мном в результате насыщения магнитной системы. Система обладает невысоким быстродействием вследствие незначительной перегрузочной способности двигателя и в связи с тем, что управление переходными процессами переносится в цепь возбуждения.