

6.5. Автоматическое регулирование момента электропривода в системе преобразователь — двигатель
Для автоматического регулирования момента привода постоянного тока независимого возбуждения может быть использована так называемая нелинейная жесткая отрицательная обратная связь по току, или связь с отсечкой. Упрощенная принципиальная схема, в которой наряду с жесткой отрицательной обратной связью по угловой скорости имеется еще жесткая отрицательная обратная связь по току с отсечкой, показана на рис. 6.5. Отрицатель-
ная обратная связь по скорости действует на первом участке характеристики двигателя (рис. 6.6), когда ток нагрузки не достигает тока отсечки (I Iотс), и на втором — при I > Iотс. Принцип действия обратной связи по скорости был описан в § 6.4.
Отрицательная обратная связь по току с отсечкой начинает действовать тогда, когда ток якоря двигателя превышает ток отсечки. Вступая в действие, эта обратная связь позволяет системе обеспечивать с определенной
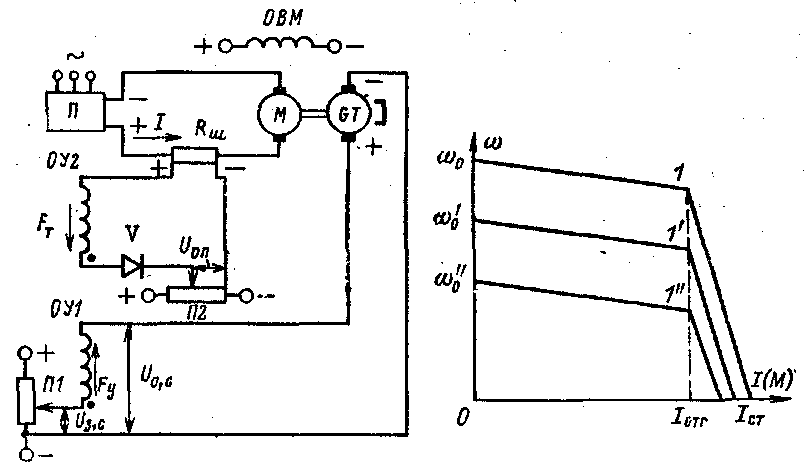
Рис. 6.5. Принципиальная .схема Рис. 6.6. Механические харак- системы автоматического регулиро- теристики двигателя, работаю- вания угловой скорости с жесткой щего в системе с отрицатель- отрицательной обратной связью по ными обратными связями по скорости и жесткой отрицательной угловой скорости и по току обратной связью по току с отсечкой. с отсечкой.
точностью поддержание постоянства тока или момента (при Ф = const).
На схеме рис. 6.5 преобразователь П (например, магнитный или электромашинный усилитель или тиристор-ный выпрямитель с промежуточным магнитным усилителем) имеет две обмотки управления: одна ОУ1, сигнал управления которой пропорционален разности задающего сигнала U3, снимаемого с потенциометра П1, и сигнала отрицательной обратной связи по скорости Uо.с, снимаемого с тахогенератора GT, и другая обмотка ОУ2, включенная через диод V на разность опорного напряжения Uon, снимаемого с потенциометра П2, и падения напряжения
на шунте Rш, пропорционального току якоря двигателя М. Разность этих напряжений при протекании тока I > Iотс создает МДС Fт, направленную встречно МДС Fy. При токах, меньших тока отсечки, в обмотке ОУ2 ток не протекает (из-за диода V и соответствующим образом подобранного значения опорного напряжения) и система работает только с обратной связью по скорости соответственно характеристикам на участках 01, '01' или "01" (рис. 6.6), отвечающим различным задающим напряжениям, снимаемым с потенциометра П1. По мере увеличения тока нагрузки угловая скорость двигателя падает, уменьшается напряжение обратной связи Uo.c , возрастает напряжение на обмотке ОУ1, равное Uо.у1 = Uз — Uoc , и возрастает ЭДС преобразователя, частично компенсируя падение угловой скорости. При токах, больших тока отсечки, появляется напряжение на обмотке ОУ2. Это напряжение вызывает размагничивающий сигнал, и результирующая МДС падает (FΣ = Fу — FT), приводя к резкому падению ЭДС преобразователя и угловой скорости двигателя. При неподвижном состоянии двигателя в его якорной цепи протекает ток стопорения Iст, а результирующая ЭДС преобразователя равна произведению стопорного тока на сопротивление якорной цепи преобразователь — двигатель.
Н а
втором участке характеристики (приI
> Iотс)
вместе с отрицательной обратной связью
по скорости действует отрицательная
обратная связь по току. В этом случае
результирующий сигнал, выраженный через
параметры схемы управления, можно
записать так:
а
втором участке характеристики (приI
> Iотс)
вместе с отрицательной обратной связью
по скорости действует отрицательная
обратная связь по току. В этом случае
результирующий сигнал, выраженный через
параметры схемы управления, можно
записать так:
(6.11)
где R0,y1— полное сопротивление цепи обмотки управления ОУ1; RT — полное сопротивление цепи обмотки токовой отсечки ОУ2 ; kт = Rшт / Rт; Iотс = Uoп / Rш ; ko.c = =kтго.у1/Rо.у1; F3 = Uз.со.у1 / Rо.у1; 0,у1, т — соответственно число витков обмоток управления ОУ1 и ОУ2; kтг — коэффициент передачи обратной связи по скорости (тахогенератора).
Если в (6.8) вместо первого уравнения подставить (6.11), а вместо второго выражения Еп = kn (FΣ) FΣ , то получим уравнение электромеханической характеристики дви-
гателя на втором участке :

(6.12)
где kп (FΣ) — коэффициент передачи (усиления) преобразователя; kд = 1/с.
Если заданы значения Iотс и Iст, а также известны параметры цепи управления обмоток, то можно найти kт.
Для режима стопорения (ω = 0, I = Iст):
![]()
(6.13)
Зная характеристику преобразователя Еп =f(FΣ) и
Еп.ст , находим :
![]() (6.14)
(6.14)
Изменяя Uoa, можно менять ток, при котором вступает в действие отрицательная обратная связь по току, следовательно, изменять предельный момент.