

Приклади розв'язання задач
Задача 14.1.
Структурна
схема нелінійної автоматичної системи
зображена на рис.14.2,а. Коефіцієнт передачі
лінійної частини системи й нелінійної
ланки
![]() умовно віднесений до нелінійної ланки.
Визначити, при яких значеннях
умовно віднесений до нелінійної ланки.
Визначити, при яких значеннях![]() система буде абсолютно стійка, якщо
характеристика нелінійної ланки
розташована в сектори (0,
система буде абсолютно стійка, якщо
характеристика нелінійної ланки
розташована в сектори (0,![]() )
(рис. 14.2,б). Вихідні дані: постійна
часу лінійної частини системи
)
(рис. 14.2,б). Вихідні дані: постійна
часу лінійної частини системи![]() ,
,![]() ,
,![]() .
.

Рисунок 14.2. Структурна схема системи й статична характеристика нелінійної ланки.
Рішення.
Частотна передаточна функція лінійної частини системи має вигляд
![]() . (14.1)
. (14.1)
Її дійсна й мнима частини відповідно рівні
 ,
(14.2)
,
(14.2)
 . (14.3)
. (14.3)
Введемо
деякі функції
![]() й
й![]() у такий спосіб:
у такий спосіб:
 , (14.4)
, (14.4)
 (14.5)
(14.5)
По
вираженнях (14.5) і (14.5) побудуємо
характеристику
![]() й через точку (
й через точку (![]() ) проведемо пряму Попова так, щоб
побудована характеристика цілком лежала
праворуч від цієї прямої (рис.14.3.)
) проведемо пряму Попова так, щоб
побудована характеристика цілком лежала
праворуч від цієї прямої (рис.14.3.)
jQ*()
P*()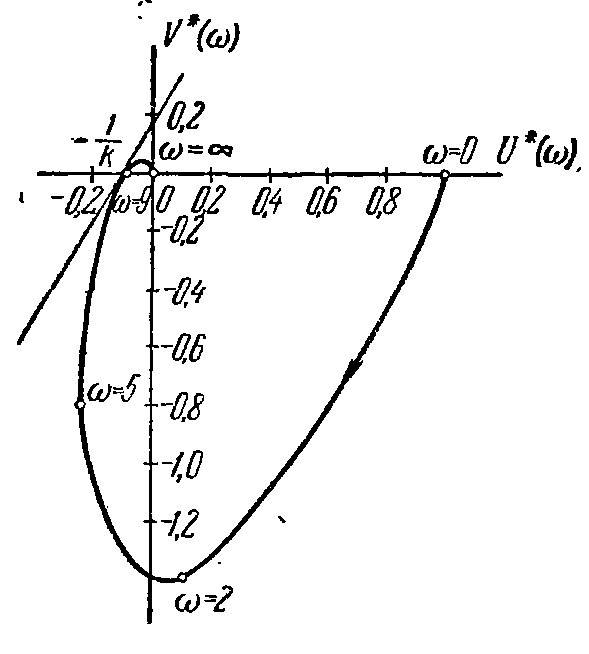
Рисунок 14.3. Модифікована АФЧХ до задачі 14.1.
Згідно
рис.14.3.
![]() .
Тому система абсолютно стійка для всіх
нелінійних характеристик розташованих
у секторі
.
Тому система абсолютно стійка для всіх
нелінійних характеристик розташованих
у секторі
![]() (14.6)
(14.6)
і, зокрема, для характеристики релейного типу, зображеної на рис.14.2,б.
Таким
чином, достатня умова абсолютної
стійкості замкнутої нелінійної системи
зводиться в цьому випадку до виконання
необхідної й достатньої умови стійкості
замкнутої лінійної системи, що має в
розімкнутому стані коефіцієнт передачі,
рівний
![]() .
.
Задача 14.2.
Структурна
схема нелінійної автоматичної системи
зображена на рис.14.4,а. Перевірити
виконання достатньої умови абсолютної
стійкості системи при наступних значеннях
параметрів системи:
![]() ,
,![]() ,
,![]() ,
,![]() ,
коефіцієнт передачі лінійної частини
системи
,
коефіцієнт передачі лінійної частини
системи![]() ,
коефіцієнт підсилення нелінійної ланки
,
коефіцієнт підсилення нелінійної ланки![]() (рис.14.4,б).
(рис.14.4,б).
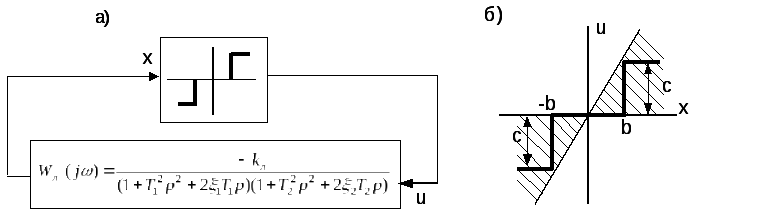
Рисунок 14.4. Структурна схема системи й характеристика нелінійної ланки.
Рішення.
Коефіцієнт передачі розімкнутої системи
![]()
віднесемо до нелінійної ланки. Тоді частотна передаточна функція розімкнутої системи буде дорівнює
![]() (14.7)
(14.7)
Визначаємо функції
 , (14.8)
, (14.8)
 . (14.9)
. (14.9)
По
вираження (14.8) і (14.9) будуємо характеристику
![]() (рис.14.5) на речовинній осі відкладемо
точку з координатами
(рис.14.5) на речовинній осі відкладемо
точку з координатами![]() .
Через цю точку можна провести пряму
Попова так, що вся побудована характеристика
буде розташовуватися праворуч від неї.
Отже, дана система буде стійкою при
заданому
.
Через цю точку можна провести пряму
Попова так, що вся побудована характеристика
буде розташовуватися праворуч від неї.
Отже, дана система буде стійкою при
заданому![]() ,
якщо статична характеристика нелінійної
ланки цілком розташовується в секторі
,
якщо статична характеристика нелінійної
ланки цілком розташовується в секторі![]() .
Цей сектор заштрихований на рис.14.4,б.
.
Цей сектор заштрихований на рис.14.4,б.
jQ*()
P*()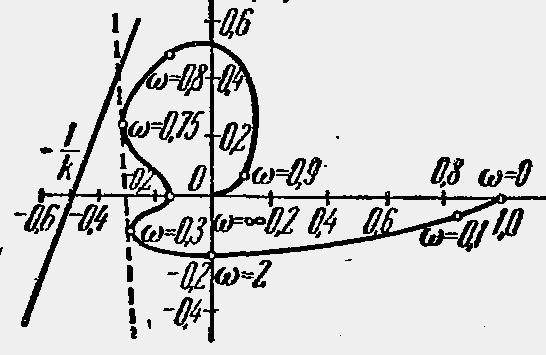
Рисунок 14.5. Модифікована АФЧХ до задачі 14.2.
СПИСОК ЛИТЕРАТУРЫ
1. Воронов А.А. Основы теории автоматического управления. Автоматическое регулирование непрерывных линейных систем.– М.:Энергия, 1980.- 310с.
2. Теория автоматического управления. Ч. 1/ под общей редакцией Нетушила А.В. – М.: Высшая школа, 1968.- 424с.
3. Лукас В. А. Теория автоматического управления. – М.: Недра, 1990. – 416 с.
4. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. М.: Наука, 1989. 304 с.
5. Расчет автоматических систем / под редакцией Фатеева А.В.– М.: Высшая школа, 1973.- 336с.
6.Сборник задач по теории автоматического регулирования и управления/под редакцией Бесекерского В.А. – М.:Наука,1978.-510с.
Навчальне видання
Методичні вказівки до проведення практичних занять з курсу
"Теорія автоматичного управління"
Частина 2
Для студентів, що навчаються за напрямами