


Часть III. Теоретические материалы Глава 2. Методы решения СЛАУ 2.5. Метод отражений
Меню |
Вверх Назад Вперёд Пред. След. Указатель Помощь Экран |
2.5. Метод отражений
2.5.1.Система из двух уравнений
2.5.2.Общая схема метода отражений
2.5.3.-разложение
Недостатком метода Гаусса и его модификаций является то, что элементарные преобразования в общем случае ухудшают обусловленность исходной системы (æ∞( ) > 1). Поэтому разработаны альтернативные методы приведения матрицы к треугольному виду, основанные на ортогональных преобразованиях.
Часть III. Теоретические материалы Глава 2. Методы решения СЛАУ 2.5. Метод отражений
Меню 2.5.1. Система из двух уравнений Вверх Назад Вперёд Пред. След. Указатель Помощь Экран
2.5.1. Система из двух уравнений
Рассмотрим СЛАУ |
[ 21 |
|
][ 2 |
] |
|
[ 2 |
]. |
|
= |
22 |
= |
(2.33) |
|||||
|
11 |
12 |
1 |
|
|
1 |
|
|
Для её решения применим к обеим частям ортогональное линейное преобразование , которое «обнуляет» элемент 21:
= ′ = [ |
0 |
22′ |
][ 2 |
] |
= |
[ 2′ |
] |
= . |
(5.1′) |
|
11′ |
12′ |
1 |
|
|
1′ |
|
|
|
Пусть — -й столбец матрицы , тогда ′ = . Так как ортогональные преобразования сохраняют евклидову норму векторов, имеем ‖ ‖ = ‖ ′‖ (в дальнейшем ‖ · ‖ = ‖ · ‖2), поэтому 11′ = ±‖ 1‖.
|
|
|
− ′ |
|
′ |
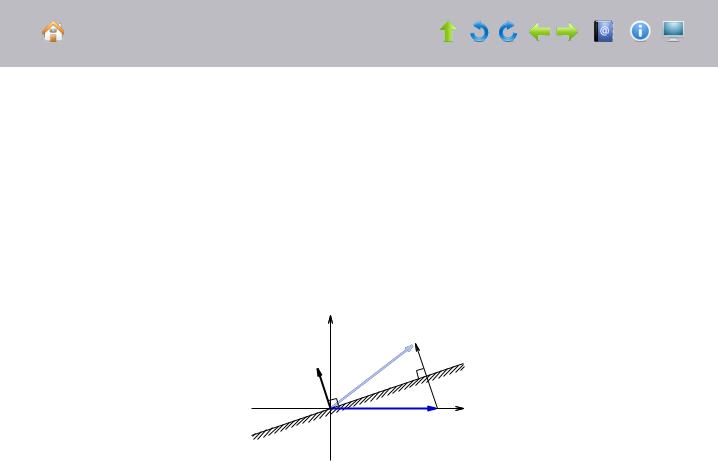
Рисунок 2.2 Преобразование отражения на плоскости. |
|
Рассмотрим вектор = 1, под действием переходящий в ′ = 1′ . Наша задача — определить как преобразование отражения относительно какой-то гиперплоскости, что равносильно нахождению вектора нормали к этой гиперплоскости, ‖ ‖ = 1. Нетрудно заметить, что векторы − ′ и коллинеарны, следовательно

Часть III. Теоретические материалы Глава 2. Методы решения СЛАУ 2.5. Метод отражений
Меню 2.5.1. Система из двух уравнений |
|
|
|
|
|
|
|
Вверх |
Назад |
Вперёд Пред. След. |
Указатель Помощь Экран |
= ± |
|
|
|
− |
′ |
. |
|
|
(2.34) |
||
|
|
|
|
′‖ |
|
|
|||||
‖ |
− |
|
|
||||||||
|
|
|
|
|
|
найти ′. Из |
|
||||
Теперь рассмотрим обратную задачу: по данным |
векторам и |
|
(2.34) имеем |
||||||||
±‖ − ′‖ = − ′ ′ = − , R.Так как ( + ′) , ( + ′, ) = (2 − , ) = 0 |
= 2( , ), |
||||||||||
откуда в итоге получаем |
|
|
2( , ) . |
|
|
|
|||||
′ = |
− |
|
|
(2.35) |
|||||||
|
|
|
|
|
|
|
|
|
|||
Таким образом, в случае системы (2.33) прямой ход метода отражений состоит в следующем:
1)По формуле (2.34) найти вектор нормали , определяющий гиперплоскость, при отражении относительно которой вектор 1 переходит в 1′ = (±‖ 1‖, 0) .
2)По формуле (2.35) применить найденное преобразование отражения к векторам 2 и .

Часть III. Теоретические материалы Глава 2. Методы решения СЛАУ 2.5. Метод отражений
Меню 2.5.2. Общая схема метода отражений Вверх Назад Вперёд Пред. След. Указатель Помощь Экран
2.5.2. Общая схема метода отражений
В случае СЛАУ произвольной размерности, метод отражений, как и в двумерном случае, определяется формулами (2.34), (2.35). Алгоритм метода имеет следующий вид (напомним, что обозначает -й векторстолбец матрицы ).
1) Вычислить по формуле (2.34), где = 1, ′ = 1′ = (±‖ 1‖, 0, . . . , 0) .
2) |
1 ← |
1 |
← |
|
̸ |
← |
′ по формуле (2.35). |
|
′ ; вычислить |
′ |
|
= 1, |
|
3)Повторить шаги 1-2 для нижней правой подматрицы и соответствующего подвектора размерности− 1, и так далее до тех пор, пока матрица не станет верхнетреугольной.
Замечание 2.6. При реализации метода отражений существует свобода выбора знака для вектора 1′ . Чтобы избежать вычитания близких чисел при вычислении по формуле (2.34), этот знак выбирают таким образом, чтобы он был противоположен знаку 11 ( в общем случае). Тогда при вычислении 1 − 1′ фактически будут складываться два одинаковых по модулю числа.
Часть III. Теоретические материалы Глава 2. Методы решения СЛАУ 2.5. Метод отражений
Меню 2.5.3. -разложение Вверх Назад Вперёд Пред. След. Указатель Помощь Экран
2.5.3. -разложение
Найдём в явном виде матрицу преобразования отражения, задаваемого формулой (2.35).
′ = − 2( , ) = − 2 ( ) = − 2( ) = ( − 2 ) .
Определение. Пусть R (C ), ‖ ‖2 = 1. Матрица
= ( ) = − 2
называется матрицей отражения. Она задаёт преобразование отражения относительно гиперплоскости с нормалью .
Свойства матрицы отражения
1.( ) = ( )−1.
2.Матрица отражения является симметричной (самосопряжённой).
3.Матрица отражения является ортогональной (унитарной).
4.Все собственные значения матрицы отражения равны ±1.
Доказательство. Так как матрица унитарна, имеем ‖ ‖ = 1. Пусть — произвольное собственное значение , — соответствующий собственный вектор: = . Тогда ‖ ‖ = ‖ ‖ = ‖ ‖, откуда | | = 1.
Докажем теперь, что собственные числа самосопряжённой матрицы вещественны:
= * ( , ) = ( , * ) = ( , ) = ( , ) ( , ) R C .
Далее пусть — собственный вектор. Тогда
( , ) = ( , ) = ‖ ‖2 = ( , ) R.
Таким образом, | | = 1 и R, то есть = ±1.

Часть III. Теоретические материалы Глава 2. Методы решения СЛАУ 2.5. Метод отражений
Меню 2.5.3. -разложение Вверх Назад Вперёд Пред. След. Указатель Помощь Экран
Замечание 2.7. Заметим, что вычисление преобразования отражения по формуле (2.35) требует ( ) операций умножения и сложения, в то время как умножение на матрицу ( ) требует ( 2) операций. Поэтому в явном виде ( ) практически никогда не используют, а хранят только .
Процесс преобразования к верхнетреугольному виду по методу отражений можно представить в виде
|
( +1) = ( ), |
|
|
|
|
|||
где — блочная матрица вида |
= [ |
|
( )] |
|
|
|
|
|
|
0 |
, |
|
|
(2.36) |
|||
|
|
−1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 — единичная матрица размерности − 1, |
— вектор нормали размерности − + 1. |
|
||||||
Таким образом мы имеем |
|
|
|
|
|
|
|
|
|
|
|
˜ |
|
( ) |
, |
|
|
−1 . . . 2 1 = = |
|
|
||||||
откуда |
|
|
|
|
|
|
|
|
= , |
где = ˜−1, |
= ( ). |
(2.37) |
|||||
Определение. -разложением матрицы называется её представление в виде
= ,
где — ортогональная ( −1 = ), а — верхнетреугольная матрица.
Теорема 2.7 (о -разложении). Для любой вещественной квадратной матрицы существует - разложение: = , где — ортогональная, — верхнетреугольная матрица с неотрицательными диагональными элементами. Если det ̸= 0, то все диагональные элементы положительны. [Доказательство]
Рассмотрим подробно алгоритм построения -разложения методом отражений. Из (2.37) имеем
= ˜−1 = ( |
−1 |
. . . )−1 |
= |
1 |
. . . |
, |
|
1 |
|
−1 |
|
где определяются формулой (2.36) (здесь мы использовали тот факт, что −1 = ).

Часть III. Теоретические материалы Глава 2. Методы решения СЛАУ 2.5. Метод отражений
Меню 2.5.3. -разложение Вверх Назад Вперёд Пред. След. Указатель Помощь Экран
Cогласно замечанию 2.7 вместо того, чтобы хранить отдельно матрицу , мы можем хранить лишь векторы , которые однозначно определяют . Кроме того, так как R − +1, можно их хранить на месте нижнего треугольника матрицы (для этого необходимо завести отдельный вектор для хранения диагональных элементов ).
Предположим, что нам известно -разложение матрицы . Тогда решение СЛАУ = осуществляется за ( 2) операций:
= |
|
{ |
= . |
|
|
|
= , |
Таким образом, сначала вычисляется = −1 = , а затем обратной подстановкой находится . Если матрица хранится в виде набора нормалей , то вычисление вектора
= −1 = −1 . . . 1
эквивалентно последовательному применению к вектору всех преобразований отражения, использованных при построении -разложения.