q1 1 arctg x z ,
z ,
q2 h2 y,
q3 h3 
 x2 z2 h S ;
x2 z2 h S ;
КИНЕМАТИЧЕСКИЕ |
ПОКОЛЕНИЯ |
•Формулы , связывающие декартовы координаты исполнительной точки с обобщенными (управляемыми) координатами для манипулятора этого типа , имеют следующий вид
•Рисунок 3.6 – Манипулятор с цилиндрической системой координат.
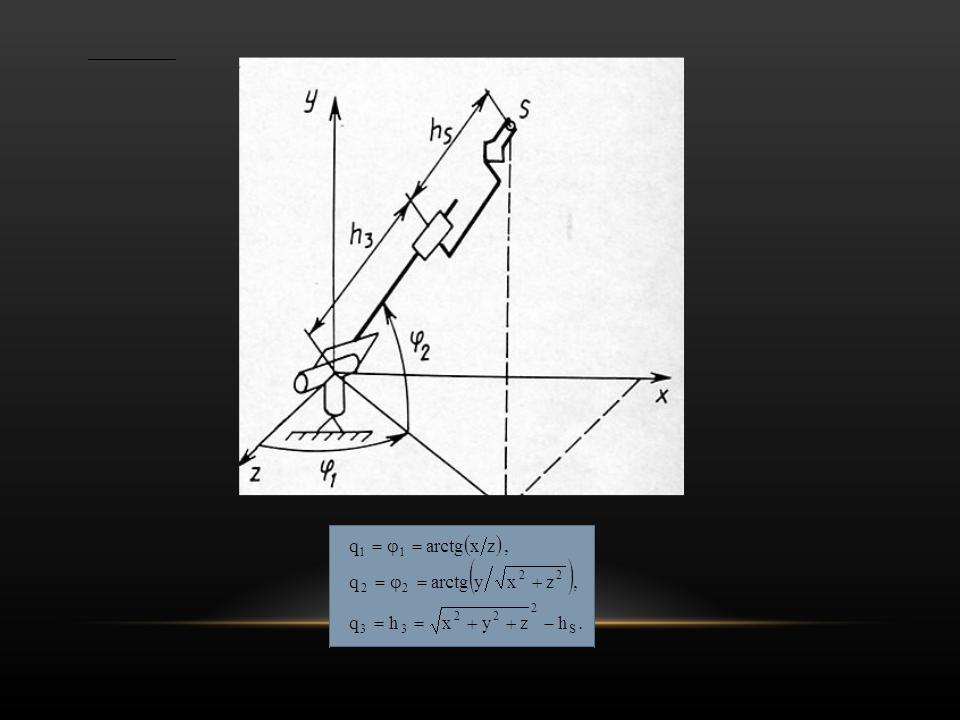
q1 1 arctg x z ,
z ,
q2 h2 y,
q3 h3 
 x2 z2 h S ;
x2 z2 h S ;
КИНЕМАТИЧЕСКИЕ |
ПОКОЛЕНИЯ |
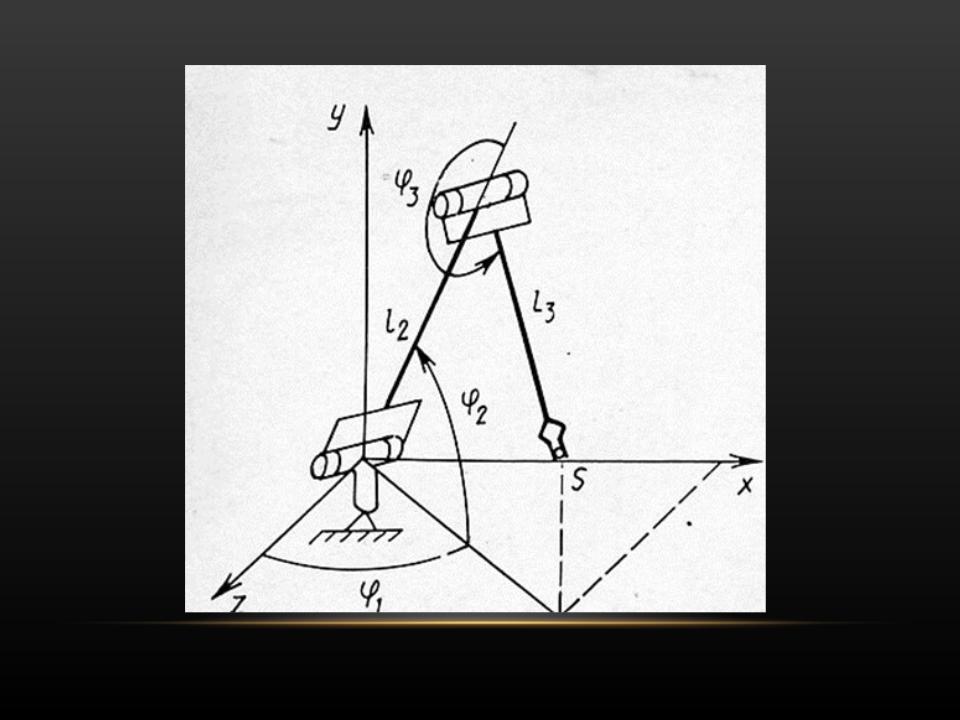
•Формулы связи декартовых координат и обобщенных координат имеют следующий вид
•Рисунок 3.7 – Манипулятор со сферической системой координат
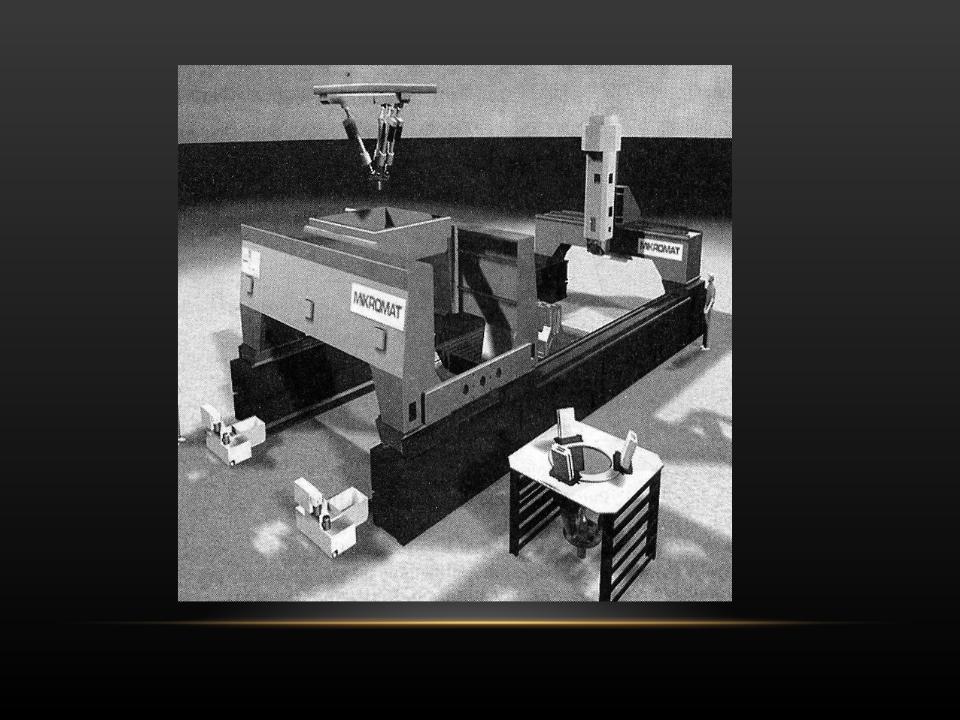
КИНЕМАТИЧЕСКИЕ СТРУКТУРЫ НОВОГО ПОКОЛЕНИЯ
•Рисунок 3.8 – Манипулятор с антропоморфной системой координат.
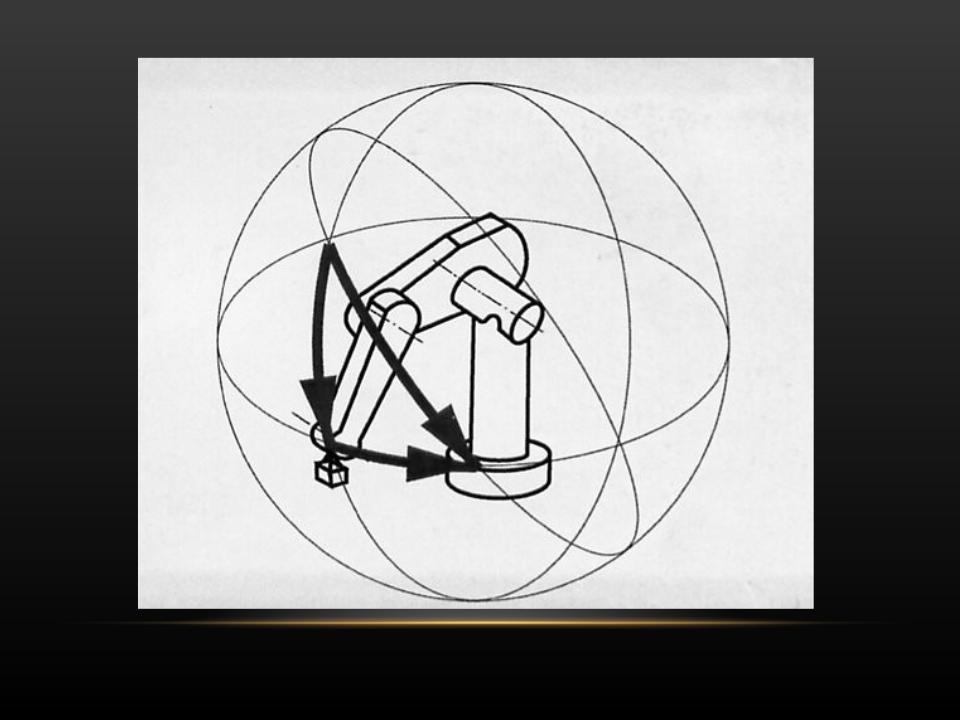
•Рисунок 3.9 – Предлагаемый графический символ робототехники.
КИНЕМАТИЧЕСКИЕ
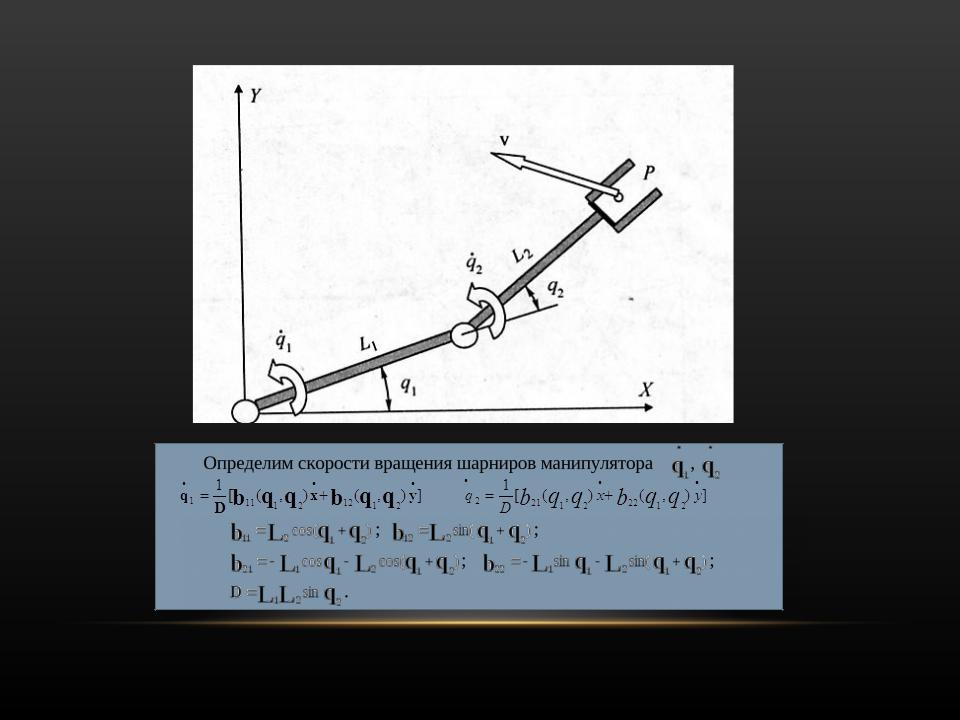
•Рисунок 3.10 – Постановка обратной задачи о скорости для манипулятора типа «SKARA».

КИНЕМАТИЧЕСКИЕ СТРУКТУРЫ НОВОГО ПОКОЛЕНИЯ
•Рисунок 3.11 – Законы движения звеньев манипулятора:
•1,4 – углы поворотов соответственно первого и второго звена,
•2,3 – скорость движения соответственно первого и второго звена.
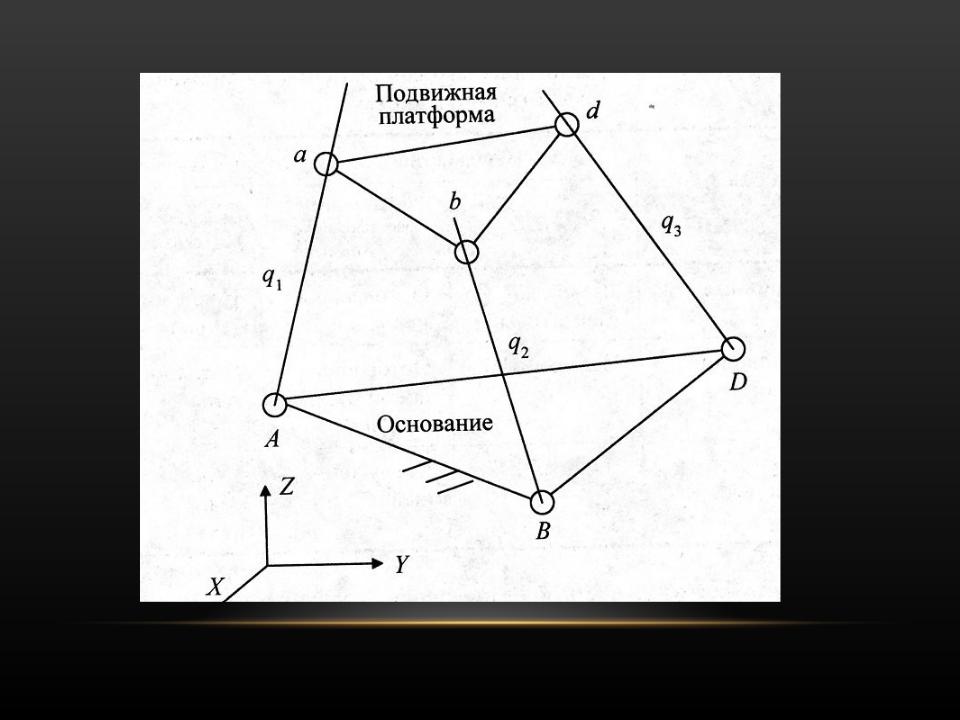
•Рисунок 3.12 – Платформа Стюарта.
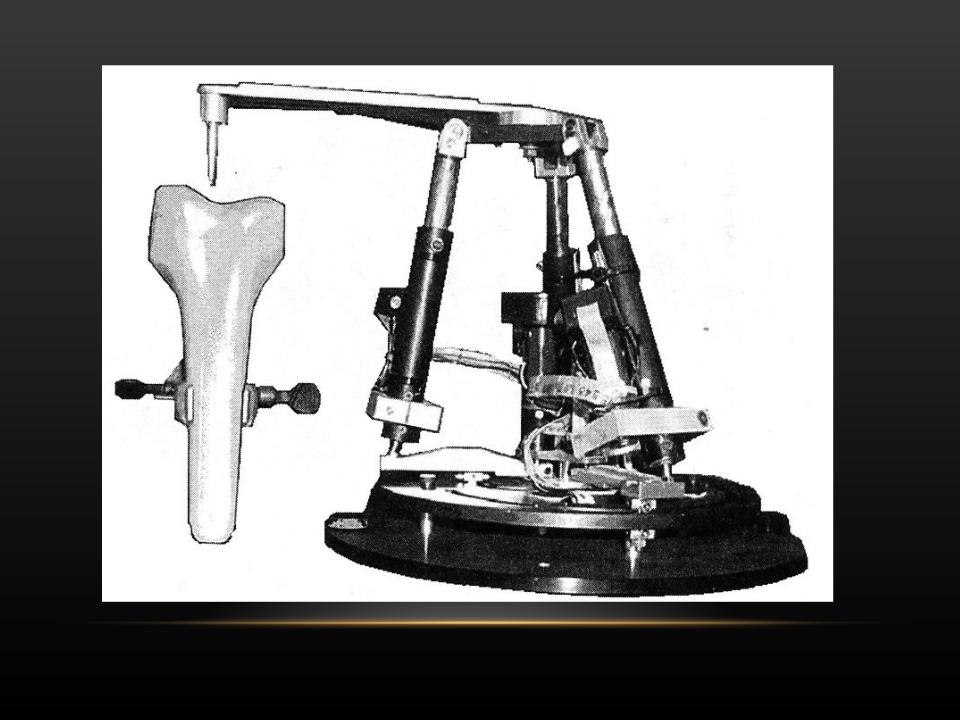
•Рисунок 3.13 – Трипод, сканирующий поверхность кости.
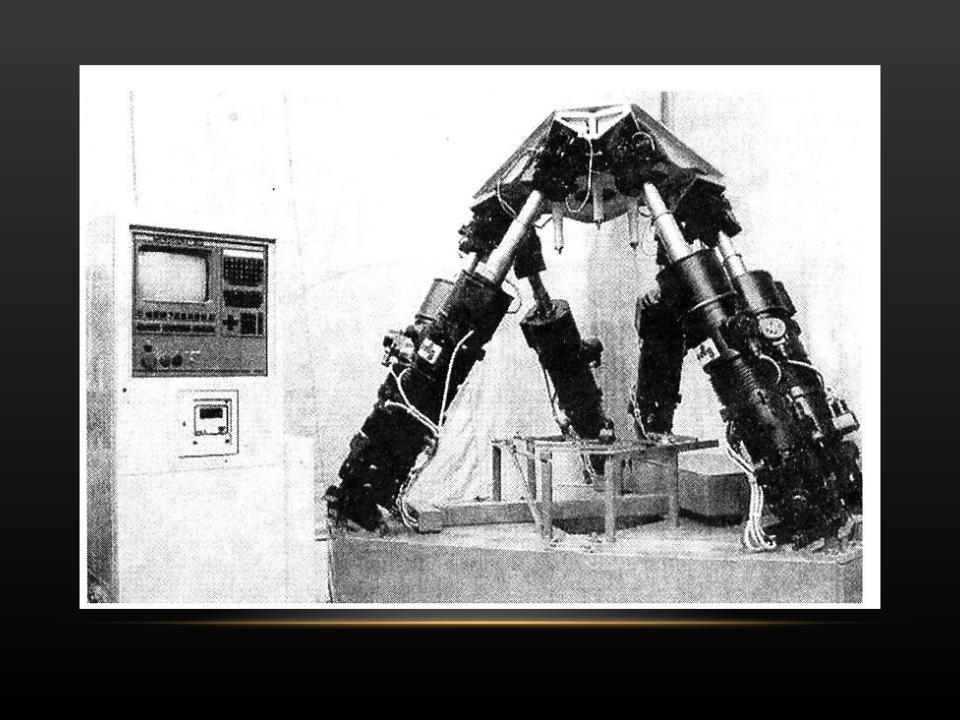
•Рисунок 3.14 – Гексапод.