

Теоретическая механика2
.pdf21
При t = τ , когда камень находится в точке B , покидая участок AB , имеем
vB = g (sin α − f cosα) τ + vA ;
l = |
g (sin α − f cosα) |
τ2 |
+ vA τ . |
|
|||
2 |
|
|
|
После подстановки известных численных данных получим, что vB = 9,8 (sin 30 − 0,1 cos30) τ + vA ;
0,7 = |
9,8 (sin 30 − 0,1 cos30) |
τ2 |
+ vA τ . |
В итоге |
2 |
|
|
vB = 4,051 τ + vA ; |
|
|
|
|
|
|
|
|
0,7 = 2,026 τ2 + vA τ . |
(4) |
|
Рассмотрим теперь движение камня на участке BC . Дифференциальные уравнения движения камня на данном участке:
m x = ∑ Fix ;
|
m y = ∑ Fiy . |
(5) |
|
На участке BC на камень действует лишь сила тяжести G , поэтому |
|||
уравнения (5) примут следующий вид: |
|
||
|
|
m x = 0 ; |
|
|
m y = m g . |
|
|
В итоге |
|
||
|
|
x = 0 ; |
|
|
|
y = g . |
|
После двойного интегрирования получим |
|
||
|
|
x = C3 ; |
|
|
y = g t + C4 ; |
|
|
x = C3 t + C5 ; |
|
||
y = |
g |
t 2 + C4 t + C6 . |
(6) |
|
|||
2 |
|
|
|
Постоянные интегрирования находим, используя начальные условия: |
|||
при t = 0 (новое начало отсчета времени) x = 0 , |
y = 0 , x = vB cosα , |
||
22
y = vB sin α . Откуда
C3 = vB cosα ; C4 = vB sin α ;
C5 = C6 = 0 .
С учетом значений постоянных интегрирования уравнения (6) перепишем следующим образом:
x = vB cosα ;
y = g t + vB sin α ; x = vB t cosα ;
y = |
g |
t 2 |
+ vB t sin α . |
(7) |
|
||||
2 |
|
|
|
|
Координаты точки C : x = d , y = h , при этом угол между векторами vGC и vCy равен углу наклона участка DE к горизонту, т. е. β (по условию задачи вектор vGC перпендикулярен наклонному участку DE ), поэтому
vCx |
= tgβ , |
(8) |
|
vCy |
|||
|
|
где vCx = xT , а vCy = yT – проекции скорости камня соответственно на координатные оси Bx и By в момент времени T , т. е. когда он достигает
точки C . |
|
|
|||||
Уравнения (7) для момента времени t = T |
перепишем с учетом (8) |
||||||
следующим образом: |
|
|
|||||
tgβ = |
|
vB cosα |
|
|
|||
|
|
; |
|
|
|||
g T + vB sin α |
|
|
|||||
d = vB T cosα ; |
|
|
|||||
h = |
g |
T 2 + vB T sin α . |
(9) |
||||
|
|
||||||
2 |
|
|
|
|
|||
Подставим в (9) известные по условию задачи данные: |
|
||||||
tg20 = |
|
|
vB cos30 |
; |
|
||
9,8 T + vB sin 30 |
|
||||||
1 = vB T cos30 ;
|
|
|
23 |
|
|
h = |
9,8 |
T 2 |
+ vB T sin 30 . |
(10) |
|
2 |
|||||
|
|
|
|
Решая уравнения (10) совместно получим, что vB = 2,454 м/с;
T = 0,470 с; h = 1,659 м.
Подставим скорость vB в уравнения (4): 2,454 = 4,051 τ + vA ; 0,7 = 2,026 τ2 + vA τ ,
после решения которых, отбрасывая отрицательные корни, получим, что
τ= 0,459 с;
vA = 0,595 м/с.
Ответ: vA = 0,595 м/с, h = 1,659 м.
Пример выполнения задания Д2
|
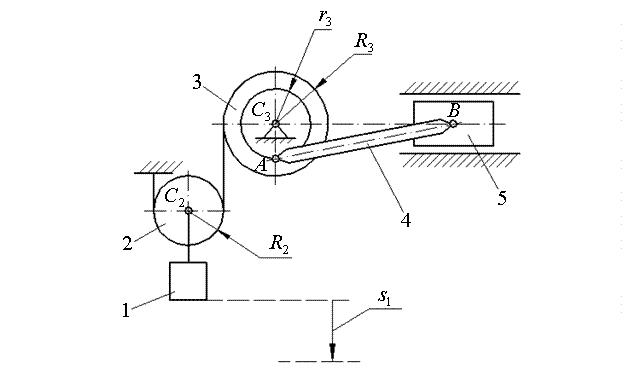
Дано: m1 – масса груза 1; m2 = 2 m1 – масса блока 2; m3 = 3 m1 – |
||||||||
масса барабана 3; m4 |
= 2 m1 – масса шатуна 4; R2 = 20 см – радиус блока |
||||||||
2; r |
= R |
2 |
и R = |
3 |
R |
2 |
– радиусы барабана 3; i |
3 |
= 30 см – радиус инерции |
|
|||||||||
3 |
|
3 |
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
барабана 3; AB = l = 2 R2 – длина шатуна 4 (рисунок 5).
Массой ползуна 5 пренебречь. Шатун 4 считать однородным тонким стержнем, а блок 2 – однородным сплошным цилиндром.
Груз 1 из состояния покоя переместился вниз на расстояние s1 = 15 π см.
Найти: скорость v1 груза 1 в конечном положении.
Решение
Применим теорему об изменении кинетической энергии, считая, что система состоит из твердых тел и нерастяжимой нити:
T − T0 = ∑ AiE , |
(11) |
где T – кинетическая энергия системы в конечном положении; T0 – кинетическая энергия системы в начальном положении;
24
∑ AiE – сумма работ внешних сил, действующих на систему во
время ее движения. Так как система начала движение из состояния покоя, то T0 = 0, и уравнение (11) принимает вид:
T = ∑ AiE .
Рисунок 5– Исходная схема
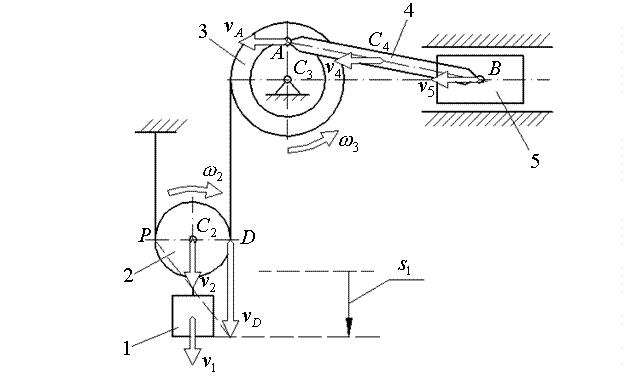
Определим сначала левую, а затем правую часть уравнения (11). Для этого изобразим систему в конечном положении (рисунок 6).
Кинетическая энергия системы в конечном положении
|
T = T1 + T2 + T3 + T4 , |
(12) |
где T1 – кинетическая энергия груза 1; |
|
|
T2 |
– кинетическая энергия блока 2; |
|
T3 |
– кинетическая энергия барабана 3; |
|
T4 |
– кинетическая энергия шатуна 4. |
|
Так как груз 1 движется поступательно, то его кинетическую энергию найдем по формуле
25
T = |
m v2 |
|
|
1 1 |
. |
(13) |
|
|
|||
1 |
2 |
|
|
|
|
|
|
Кинетическая энергия блока 2, совершающего плоское движение, |
|
||
|
|
m |
2 |
v2 |
JC |
2 |
ω22 |
|
|
|
T |
= |
|
2 |
+ |
|
|
, |
(14) |
||
|
|
|
|
|
|
|||||
2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
где v2 – скорость центра масс (точки C2 ) блока 2;
JC2 – момент инерции блока 2 относительно оси, проходящей через точку C2 перпендикулярно плоскости схемы;
ω2 – угловая скорость плоского движения блока 2.
Рисунок 6 – Схема системы в конечном положении
Кинетическая энергия барабана 3, совершающего вращательное движение вокруг неподвижной оси,
|
T3 |
= |
JC |
ω33 |
, |
(15) |
|
3 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
где JC |
– момент инерции блока 2 относительно оси его вращения |
|||||
|
3 |
|
|
|
|
|
26
(проходящей через точку C3 перпендикулярно плоскости схемы); ω3 – угловая скорость вращения барабана 3.
Шатун 4, как и блок 2, совершает плоское движение. Его кинетическая энергия
|
|
m |
4 |
v2 |
JC |
4 |
ω42 |
|
|
|
|
T = |
|
4 |
+ |
|
|
, |
(16) |
||
|
|
|
|
|
|
|
||||
|
4 |
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
где v4 |
– скорость центра масс (точки C4 ) шатуна 4; |
|
||||||||
JC4 |
– момент инерции шатуна 4 относительно оси, проходящей |
|||||||||
через точку C4 перпендикулярно плоскости схемы; |
|
|||||||||
ω4 |
– угловая скорость плоского движения шатуна 4. |
|
||||||||
Найдем кинематические соотношения между линейными и угловыми |
||||||||||
скоростями и перемещениями точек системы и выразим их соответственно
через искомую скорость v1 и перемещение s1 |
груза 1. |
||
Скорость центра масс блока 2 равна скорости груза 1, т. е. |
|||
v2 = v1 . |
|
(17) |
|
Угловая скорость блока 2 |
|
|
|
ω2 = |
v2 |
, |
|
C2 P |
|
||
|
|
|
|
где C2 P – расстояние от центра масс блока 2 до мгновенного центра скоростей (МЦС), т. е. точки P .
|
|
|
Так как C2 P = R2 , то ω2 |
= |
v2 |
= |
|
|
v1 |
. В итоге |
|
|||||||||||||||
|
|
R2 |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ω2 |
= |
|
v1 |
. |
|
|
|
(18) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
||||
|
|
|
Скорость |
v1 |
точки |
D |
|
в |
2 |
|
|
|
раза больше |
скорости v2 : |
||||||||||||
v |
D |
= ω |
2 |
DP = |
|
2 R |
2 |
= 2 v . В итоге |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
R2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
vD = 2 v1 . |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
Угловая |
скорость |
барабана |
3 |
|
(с |
учетом того, |
что по условию |
||||||||||||||||
R = |
3 |
|
R |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
3 |
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω = vD = |
2 v1 |
|
|
4 v1 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
. |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
R3 |
3 |
|
R2 |
|
3 R2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
27 |
|
|
|
|
|
|
|
|
|||||
|
|
В итоге |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 v1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
ω3 |
= |
|
|
|
|
. |
|
(19) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 R2 |
|
||||||||||
|
|
Обозначив угол поворота барабана как ϕ3 , произведем следующие |
||||||||||||||||||||||||||
замены в формуле (19): |
|
|
|
|
|
|
|
|
|
|
dϕ3 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ω3 |
= |
|
|
|
; |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
= |
ds1 |
, |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
dt |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
после чего получим, что |
|
|
dϕ3 |
|
|
|
4 |
|
|
|
|
ds1 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
; |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
3 R2 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dϕ3 |
|
= |
4 |
|
|
ds1 . |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 R2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
После интегрирования при нулевых начальных условиях получаем, |
||||||||||||||||||||||||||
что |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
ϕ3 |
|
= |
|
|
s1 . |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 R2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Если груз 1 переместиться на расстояние s1 = 15 π , то барабан 3 по- |
||||||||||||||||||||||||||
вернется на угол ϕ3 = |
4 15 π |
= π , что и отражено на рисунке 7. |
|
|||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
3 20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Скорость точки |
A (с учетом того, |
|
что по условию задачи |
r3 = R2 ) |
||||||||||||||||||||||
v |
A |
= ω |
3 |
r = |
4 v1 |
R |
2 |
= |
4 |
v . В итоге |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
3 |
3 R2 |
|
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
v |
A |
|
= |
v . |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Так как скорости точек A и B параллельны, то в этот момент МЦС шатуна 4 находится в бесконечности, а поэтому его угловая скорость
ω4 |
= 0 , |
|
|
(20) |
||||
и скорость центра масс шатуна 4 v |
4 |
= v |
A |
= |
4 |
v . В итоге |
||
|
||||||||
|
|
|
|
3 |
1 |
|||
|
|
|
|
|
|
|
||
v |
4 |
= |
4 |
v . |
(21) |
|||
|
||||||||
|
3 |
|
1 |
|
|
|||
|
|
|
|
|
|
|
||

28
Подставим (17) и (18) в формулу (14), принимая во внимание, что момент инерции блока 2, т. е.
|
|
|
|
|
|
|
|
JC2 |
= |
|
m2 R22 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
и m2 = 2 m1 |
(см. условие задачи): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R22 |
|
v1 |
2 |
|
|
|
|
|
|
|
v2 |
JC |
ω22 |
|
|
m v2 |
|
|
|
|
2 |
m1 |
|
|
|
|
|
|
|
|
|
|||
|
m |
|
2 |
|
2 |
R |
|
3 |
|
|
|||||||||||||||
T = |
|
2 |
2 + |
|
2 |
= |
|
1 |
1 + |
|
|
|
|
|
|
|
2 |
|
= |
|
m |
v2 . |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
2 |
|
|
2 |
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
В итоге |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
T |
= |
m v2 . |
|
|
|
|
|
|
|
|
(22) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляем (19) в формулу (15) и учитываем, что |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
JC |
= m3 i32 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и m3 = 3 m1 (см. условие задачи):
|
|
JC ω33 |
|
|
|
2 |
|
|
4 v |
2 |
8 |
|
|
i2 |
|
||
|
|
|
3 m1 i3 |
|
3 R |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
T |
= |
3 |
= |
|
|
|
|
|
|
2 |
= |
|
m |
|
3 |
v2 . |
|
2 |
|
|
|
|
2 |
|
|
3 |
R2 |
||||||||
3 |
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
В итоге |
|
|
|
|
|
|
|
i32 |
|
|
|
|
|
|
|
|
|
|
|
|
T = |
8 |
|
|
|
m v2 . |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
3 |
3 |
|
|
R22 |
1 |
1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Учитывая, что m4 = 2 m1 (по условию задачи):
|
|
|
|
|
|
|
|
4 v |
2 |
|
|
|
|
|
|
|
|
m v2 |
JC |
4 |
ω42 |
|
2 m1 |
|
1 |
|
|
JC |
0 |
|
16 |
|
|
T = |
4 4 + |
|
|
= |
|
|
3 |
|
+ |
|
2 |
= |
|
m |
v2 . |
|
|
|
|
|
|
|
|
|
|
|
|||||||
4 |
2 |
|
|
2 |
|
|
2 |
|
|
2 |
|
9 |
1 |
1 |
||
|
|
|
|
|
|
|
|
|
|
|||||||
В итоге
T4 = 169 m1 v12 .
Преобразуем формулу (12):
(23)
(24)
29
|
1 |
|
v2 |
|
3 |
|
v2 |
|
8 |
|
|
i2 |
|
v2 |
|
16 |
|
v2 |
|
34 |
R2 |
+ |
24 |
i2 |
v2 |
|
||
T = |
|
m |
+ |
|
m |
+ |
|
|
|
3 |
m |
+ |
|
|
m |
= |
|
2 |
|
|
3 |
m |
= |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
2 |
1 |
1 |
|
2 |
1 |
1 |
|
3 |
|
R22 |
1 |
1 |
|
9 |
1 |
1 |
|
|
R22 |
|
1 |
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
= |
34 20 |
2 + 24 25 |
2 |
|
m v2 |
= |
143 |
m |
v2 . |
|||
|
|
|
|
|
|
|
||||||
|
|
202 |
|
|
1 |
1 |
|
2 |
1 |
1 |
||
|
|
|
|
|
|
|
|
|
|
|||
В итоге |
|
|
143 |
|
|
|
|
|
|
|
||
|
|
T = |
m v2 . |
|
|
|
(25) |
|||||
|
|
|
|
|
|
|||||||
|
|
|
2 |
1 |
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
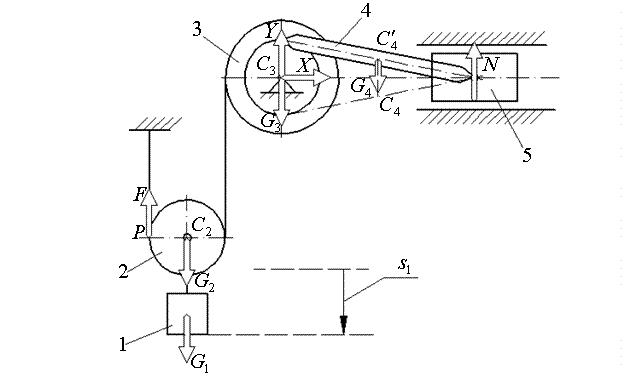
Найдем теперь сумму работ внешних сил. Покажем внешние силы на схеме (рисунок 7).
Рисунок 7 – Схема действия сил на систему
Работа силы TG натяжения троса равна 0, т. к. она приложена в неподвижной в данный момент точке P – МЦС. Работы силы тяжести G3 и реакций XG и YG, действующих на барабан 3, также равны 0, т. к. точка C3
их приложения неподвижна. Работа реакции N равна 0, т. к. данная сила составляет 900 с направлениемG смещения ее точки приложения.
Работа силы G1 , действующей на груз 1:
30
|
|
|
|
AG |
= m g s |
|
. |
|
|
(26) |
|||
Работа силы тяжести GG |
|
G1 |
1 |
1 |
|
|
|
|
|||||
2 , действующей на блок 2: |
|||||||||||||
|
|
|
A G = m |
2 |
g s = 2 m g s . |
||||||||
|
|
|
G2 |
|
|
1 |
|
|
1 |
|
|
1 |
|
В итоге |
|
|
A G |
= 2 m g s |
|
. |
|
|
(27) |
||||
|
|
|
|
|
|
||||||||
|
|
|
G2 |
|
|
1 |
1 |
|
|
|
|
||
Работа силы тяжести G4 , действующей на шатун 4: |
|||||||||||||
|
|
|
|
G |
|
|
|
|
|
′ |
|
|
|
|
|
|
AG4 |
= −m4 g C4C4 , |
|
|
|
||||||
где |
|
|
|
|
|
|
′ |
= r3 , |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
C4C4 |
|
|
|
|||
откуда A G |
= −m |
4 |
g r = −2 m g R |
2 |
. |
|
|
|
|||||
G4 |
|
3 |
|
|
|
1 |
|
|
|
|
|
||
В итоге |
|
|
|
A G |
= −2 m g R |
|
. |
(28) |
|||||
|
|
|
|
2 |
|||||||||
|
|
|
|
|
|
G4 |
|
1 |
|
|
|
|
|
Сумма работ внешних сил определится сложением работ, вычисляемых по формулам (26)–(28):
∑ AE |
= AG + AG + AG = m g s + 2 m g s − 2 m g R |
2 |
= |
||||||||
i |
G1 |
|
G2 |
G4 |
1 |
1 |
1 |
1 |
1 |
|
|
= (3 s − 2 R |
2 |
) m g = (3 15 π − 2 20) 10−2 |
m g = 1,014 m g . |
||||||||
1 |
|
1 |
|
|
|
|
1 |
|
1 |
|
|
В итоге |
|
|
∑ AiE = 1,014 m1 g . |
|
|
|
|
||||
|
|
|
|
|
|
|
(29) |
||||
Приравняем значения T и ∑ AiE , определяемые по формулам (25) и (29) соответственно:
|
143 |
m v2 |
= 1,014 m g , |
|||
|
||||||
|
|
2 |
1 |
1 |
1 |
|
откуда |
|
|
|
|
||
|
|
|
|
|
||
v = |
|
|
2 1,014 9,8 = 0,373 м/с. |
|||
1 |
|
|
143 |
|
|
|
|
|
|
|
|
||
Ответ: v1 = 0,373 м/с.