

Индуктивные тензометры
Э то
дифференциально включенные системы
(рис.10.2). При ходеS
опоры индуктивность одной катушки
увеличивается на +L,
а другая – уменьшается на -L.
С помощью мостовой схемы разность L1
- L2=
2 L
может быть преобразована в электрическое
напряжение. Можно получить линейную
зависимость напряжения от перемещения
якоря до 80% длины катушки.
то
дифференциально включенные системы
(рис.10.2). При ходеS
опоры индуктивность одной катушки
увеличивается на +L,
а другая – уменьшается на -L.
С помощью мостовой схемы разность L1
- L2=
2 L
может быть преобразована в электрическое
напряжение. Можно получить линейную
зависимость напряжения от перемещения
якоря до 80% длины катушки.
Характеристика индуктивных элементов
Входная величина - линейное перемещение, угол отклонения.
Выходная величина – изменение индуктивности, переменного напряжения.
Диапазон измерения – 80% длины катушки.
Погрешность – 1-3%
Частотный диапазон – 0-104 Гц.
Преимущества: высокая чувствительность, простота, отсутствие износа, большие перемещения.
Недостатки: чувствительность к внешним магнитным полям.
В индуктивных тензометрах сердечник
связан с подвижной опорой, а катушки
составляют часть корпуса тензометра.
индуктивных тензометрах сердечник
связан с подвижной опорой, а катушки
составляют часть корпуса тензометра.
На рис.10.3 приведена схема применения индуктивного тензометра. На схеме обозначены: 1 – корпус тензометра, 2 – держатели с опорными элементами, 3 – стол испытательной машины, 4 – объект для измерения деформаций.
Емкостные тензометры используют при высоких температурах. Наибольшие температуры, при которых может применяться тензометр – 700 – 7500C. Плечами мостовой схемы являются конденсаторы (рис.10.4).
Рис.10.4
- Конструктивная схема емкостного
тензометра и его характеристика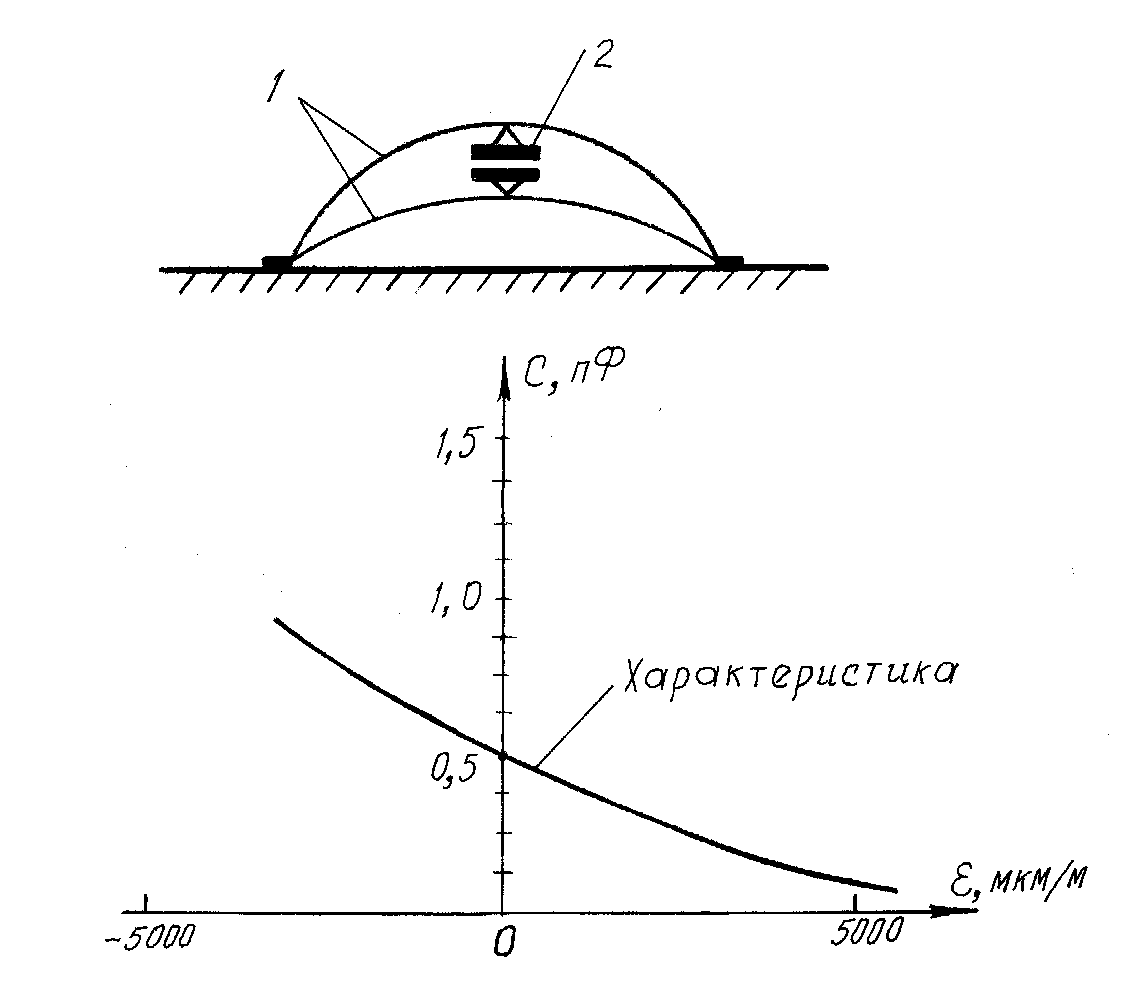
На схеме обозначены: 1 – рамки, 2 – обкладки конденсатора на керамических пластинах.
Струнные тензометры
П ринцип
работы основан на том, что частота
собственных колебаний струны изменяется
при растяжении (рис.10.5). По обмоткам
электрических магнитов проходят
электрические импульсы и возбуждают
колебания в струне. Частота собственных
колебаний струны измеряется путем
снятия с выводов обмотки электрического
напряжения. Частота электрического
напряжения является мерой деформации.
ринцип
работы основан на том, что частота
собственных колебаний струны изменяется
при растяжении (рис.10.5). По обмоткам
электрических магнитов проходят
электрические импульсы и возбуждают
колебания в струне. Частота собственных
колебаний струны измеряется путем
снятия с выводов обмотки электрического
напряжения. Частота электрического
напряжения является мерой деформации.
На схеме обозначены: 1 – корпус, 2 – электромагниты для возбуждения колебаний в струне, 3 – подвижная опора, 4 – объект измерения, 5 – струна.
Динамические измерения производятся до частот 25 Гц. Применяют в строительстве (контроль за плотинами), горном деле, судостроении.
10.2. Механические способы измерения деформаций
Механические тензометры с рычажной передачей
Применяют для легкодоступных мест, если деформация статическая. Закрепляют такие тензометры при помощи прижимов.
Т ензометр
(рис.10.6) содержит корпус 1 с неподвижной
призмой (опорой), подвижную призму -
опору 2, рычажную систему, содержащую
четыре рычага, один из которых – это
указатель 4, и отсчетную шкалу 5.
ензометр
(рис.10.6) содержит корпус 1 с неподвижной
призмой (опорой), подвижную призму -
опору 2, рычажную систему, содержащую
четыре рычага, один из которых – это
указатель 4, и отсчетную шкалу 5.
Перед измерением деформаций тензометр закрепляется на объекте измерения 3. Рычажная система увеличивает изменения базы L0до 12000 раз.
Механические тензометры с торсионной лентой
В таких тензометрах чувствительным элементом является скрученная натянутая лента (спиральная пружина, как в часах), к которой в середине прикреплен указатель.
Кернерные тензометры
Б азы
10 - 300 мм. Чувствительность превышает
0,5 мкм. Применяется для длительного
контроля за состоянием сооружений.L=L-L0;
L0 и Lизмеряют путем
кратковременной установки тензометра
на шарики, зачеканенные в исследуемую
поверхность (рис.10.7). Разность L-L0определяет деформацию. Чаще всего
применяют шарики1,5
мм.
азы
10 - 300 мм. Чувствительность превышает
0,5 мкм. Применяется для длительного
контроля за состоянием сооружений.L=L-L0;
L0 и Lизмеряют путем
кратковременной установки тензометра
на шарики, зачеканенные в исследуемую
поверхность (рис.10.7). Разность L-L0определяет деформацию. Чаще всего
применяют шарики1,5
мм.
На схеме обозначены: 1 – корпус с неподвижной опорной призмой, 2 – рычаг с подвижной призмой, 3 – индикатор.
З еркальный
тензометр Мартенсапредставлен
на рис. 10.8.
еркальный
тензометр Мартенсапредставлен
на рис. 10.8.
На схеме обозначены: 1 – прижимная пружина с неподвижной опорой, 2 – призма с зеркалом, 3 – зрительная труба, 4 – линейка – шкала. L0 = 100 – 200 мм.
Погрешность
измерения менее 0,1 %. Схема позволяет
установить соотношение
![]() , откуда
, откуда![]() .
.