

Численные значения оценок
–
–
Статическая ошибка регулирования (%) – 0,3
–
–
–
Численные значения показателей качества
Время регулирования (с) – 0,25
Величина максимального перерегулирования (%) – 24,0
–
–
Закон изменения управляющего воздействия – 1(t)
Функциональная схема сар
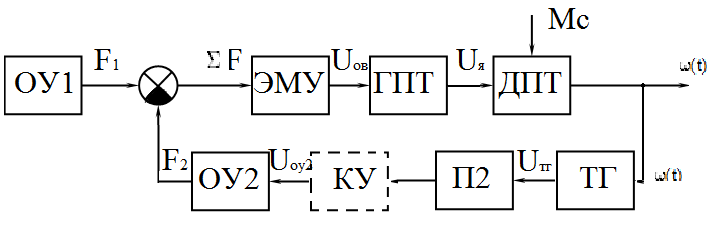
Рис. 1. Функциональная схема САР.
Анализ действующих на систему возмущающих воздействий.
Г лавным
возмущающим воздействием для данного
устройства будет являться момент
сопротивления, создаваемый нагрузкой
двигателя. Его изменение будет сказываться
на скорости вращения ДПТ.
лавным
возмущающим воздействием для данного
устройства будет являться момент
сопротивления, создаваемый нагрузкой
двигателя. Его изменение будет сказываться
на скорости вращения ДПТ.
Отсюда видно, что при увеличении главного возмущающего воздействия
Рис.2. Скоростная характеристика ДПТ.
– момента сопротивления, пропорционально падает частота вращения.
Второстепенным возмущающим воздействием можно считать:
Ток возбуждения ДПТ
Влияние температуры на активное сопротивление обмотки возбуждения ДПТ.
Принцип работы системы.
При подключении нагрузки на вал ДПТ увеличивается момент сопротивления, а следовательно снижается частота вращения вала ДПТ, что влечет за собой уменьшение напряжения цепи тахогенератора. Соответственно это обуславливает падение напряжения в цепи главной ООС. Из уравнения замыкания системы следует, что результирующий магнитный поток, действующий на ЭМУ возрастает, значит возрастает и напряжение возбуждения ГПТ. Увеличение напряжения возбуждения ГПТ приводит к увеличению напряжения в якорной цепи ДПТ, в результате возрастает частота вращения вала ДПТ, т.е. регулируемая величина стабилизируется.
![]()
Классификация сар.
Режим работы – стабилизация.
Система является одномерной.
Система является линейной.
Принцип регулирования по ошибке Ползуного – Уатта.
Точность в установившемся режиме статическая.
Динамическая точность: система инвариантна.
Закон регулирования - в данной системе используется пропорциональный закон регулирования
 .
.Система непрямого регулирования.
Система непрерывного действия.
Система также не имеет нелинейных звеньев, за исключением ЭМУ и генератора.
Аналитическое описание процессов в сау. Дифференциальные уравнения и передаточные функции звеньев сау.
ДПТ.
Необходимо составить 2 дифференциальных уравнения: для цепи якоря ДПТ и для уравнения моментов.
![]() ,
где J
– момент инерции на валу двигателя,
,
где J
– момент инерции на валу двигателя,
![]() - угловая частота вращения вала.
- угловая частота вращения вала.![]() ,
полагая, что момент сопротивления
,
полагая, что момент сопротивления![]() не зависит от
не зависит от![]() ,
а
,
а![]() зависит
от
зависит
от![]() ,
запишем:
,
запишем:![]() (*)
(*)
Для
якорной цепи двигателя, пользуясь Вторым
законом Кирхгофа можно записать:
![]() (**).
(**).
Из
уравнения (*)
выразим ток
якоря:
 .
Теперь подставим полученное выражение
в уравнение(**):
.
Теперь подставим полученное выражение
в уравнение(**):
 ;
Помножим
обе части уравнения на
;
Помножим
обе части уравнения на![]() :
:![]() Положим
Положим![]() ,
тогда:
,
тогда:![]()
![]()
![]() Разделим
обе части уравнения на
Разделим
обе части уравнения на![]() :
:


 Запишем
следующие выражения:
Запишем
следующие выражения:![]() ,
,![]() ,
тогда:
,
тогда:![]() (***)
(***)
Т.к.
![]() ,
а
,
а
 то передаточная функция по задающему
воздействию будет определяться следующим
образом:
то передаточная функция по задающему
воздействию будет определяться следующим
образом:![]() ,
,![]()
![]() .
.![]() ,
,![]() ,
тогда передаточная функция ДПТ по
возмущающему воздействию будет находиться
так:
,
тогда передаточная функция ДПТ по
возмущающему воздействию будет находиться
так:![]() .
.
ГПТ.
Для
цепи обмотки возбуждения ненасыщенного
генератора можно записать:
![]() ,
где
,
где![]() -
сопротивление, индуктивность, напряжение
и ток обмотки возбуждения.
-
сопротивление, индуктивность, напряжение
и ток обмотки возбуждения.![]() является напряжением на якоре ЭМУ.
Положим
является напряжением на якоре ЭМУ.
Положим![]() и разделим обе части уравнения на
и разделим обе части уравнения на![]() :
:![]() ,
,![]() .
Полученное выражение перепишем с учетом
замены
.
Полученное выражение перепишем с учетом
замены![]() :
:![]() (*).
(*).
Запишем
уравнение для прямолинейной части
характеристики (учитываем, что генератор
находится в ненасыщенном состоянии)
э.д.с. якорной цепи генератора:
![]()
Выразим
отсюда ток якоря и подставим в выражение
(*):

Тогда
передаточная функция генератора будет
иметь следующий вид:

ЭМУ.
ЭМУ
является двухкаскадным усилителем. Для
первого усилительного каскада запишем:
![]() ,
где
,
где![]() -
сопротивление, индуктивность, напряжение
и ток в обмотке управления ЭМУ.
-
сопротивление, индуктивность, напряжение
и ток в обмотке управления ЭМУ.
Дифференциальное
уравнение и передаточная функция первого
каскада ЭМУ будет повторять выражения
для ГПТ:
![]() ,
где
,
где![]() ,
аналогично
,
аналогично![]() в уравнении для ГПТ, - это постоянная
времени цепи управления ЭМУ.
в уравнении для ГПТ, - это постоянная
времени цепи управления ЭМУ.
Передаточная
функция второго усилительного каскада
ЭМУ будет повторять ПФ первого
усилительного каскада ЭМУ:
![]() .
.
Тогда
полная передаточная функция ЭМУ будет
выглядеть следующим образом:
![]() .
.
Тахогенератор.
![]() ,
где
,
где
![]() - коэффициент передачи тахогенератора.
Передаточная функция будет выглядеть
следующим образом:
- коэффициент передачи тахогенератора.
Передаточная функция будет выглядеть
следующим образом:![]() .
.
Потенциометр цепи уставки.
![]() ;
;
![]() .
.
Потенциометр цепи обратной связи.
![]() ;
;
![]() .
.