

2. Анализ исходных данных на проектирование
Исходные параметры:
Коэффициент передачи двигателя по регулирующему воздействию, 10,0 [об/мин В]
Электромеханическая постоянная времени двигателя, 0,28 [c]
Коэффициент передачи ЭМУ 10,0
Постоянная времени короткозамкнутой цепи ЭМУ, 0,07 [c]
Постоянная времени цепи управления ЭМУ, 0,002 [c]
Коэффициент передачи Тг, 0,6 [В с/об]
Постоянная времени якоря двигателя, 0,035 [c]
Коэффициент передачи двигателя по возмущающему воздействию, 2,7 [об/мин кг м]
Численное значение оценок
Статическая ошибка регулирования, 0,6 [%]
Численное значение показателей качества
Время регулирования, 0,5[c]
Величина максимального перерегулирования 25,0
Закон изменения упровляющего воздействия 1(t)
А также введены обозначения:
KдUя– коэффициент передачи двигателя по регулирующему воздействию;
KЭМУ– коэффициент передачи ЭМУ;
KТГ– коэффициент передачи тахогенератора;
KдМс– коэффициент передачи двигателя по возмущающему воздействию;
ТМ– электромеханическая постоянная времени;
ТКЗ– постоянная времени короткозамкнутой цепи ЭМУ;
Ту– постоянная времени цепи управления ЭМУ;
Тя– постоянная времени якоря двигателя;
eууст– статическая ошибка регулирования;
tp– время регулирования;
d- максимальное перерегулирование.
Принципиальная схема
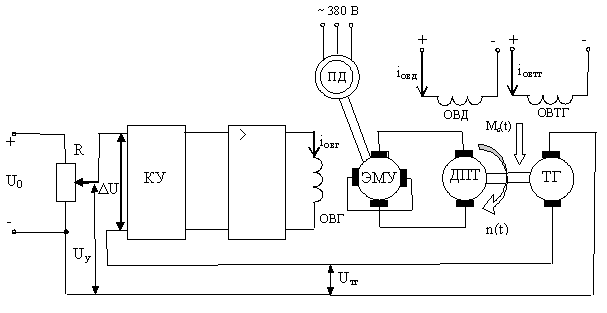
3. Функциональная схема

Обозначения:
П1– потенциометр (задаёт уставку);
КУ – корректирующее устройство;
ЭУ – электронный усилитель;
ЭМУ – электромашинный усилитель;
ДПТ – двигатель постоянного тока;
ТГ – тахогенератор;
ПД – приводной двигатель.
4. Анализ действующих на систему возмущающих воздействий
Возмущающие воздействия, действующие на САР:
Момент сопротивления со стороны ТГ;
Напряжение питающей сети (напряжения уставки, напряжения обмоток возбуждения ДПТ и ТГ, напряжения питания ПД)
Температура окружающей среды.
Момент сопротивления.
Момент сопротивления на валу ДПТ Мсявляется главным возмущающим воздействием в системе. Исходя из данной САР для устойчивого состояния системы необходимо, чтобы Мвр= Мс. Т. е. при увеличенииMcчастота оборотов ДПТ уменьшится, соответственно уменьшится и напряжение вырабатываемое тахогенератором. В соответствии с уравнением замыкания системыe(t) =y(t) –x1(t)ÞDU(t) =Uy(t) –Uтг(t)(4.1)сигнал ошибкиDU(t) возрастёт, т. е. возрастёт Еэму, напряжение на якоре ДПТ и ток якоря, а значит и частота оборотов. Т. о. мы снова пришли к устойчивому состоянию системы, при котором Мвр= Мс.
Напряжение питающей сети.
Изменение напряжения сети является второстепенным возмущением, оказывающим влияние на:
изменение напряжения U0(изменяется напряжение уставкиUу). В свою очередь это приводит к изменению входного напряжения КУDU, исходя из уравнения замыканияDU(t) =Uy(t) –Uтг(t). Происходит изменение магнитного потока управления ЭМУ, т. к. магнитный поток пропорционален напряжению питания обмотки (Фу– оказывает влияние на Еэму: Еэму= КэмуФ* Фу(4.2));
магнитный поток обмотки возбуждения ДПТ (Фдпт– влияет на частоту вращения вала двигателя, т. к.n=
 (4.3)). Т. е. при увеличении Фдпт происходит снижение частоты вращения
вала двигателя, поэтому недопустимо
отключать обмотку возбуждения двигателя;
(4.3)). Т. е. при увеличении Фдпт происходит снижение частоты вращения
вала двигателя, поэтому недопустимо
отключать обмотку возбуждения двигателя;магнитный поток обмотки возбуждения тахогенератора ТГ (Фтг– влияет на выходное напряжение ТГ).Uтг= Се*n*Фтг–Iя*Rя. Увеличение Фтг вызывает увеличениеUтг;
изменения напряжения питания ПД приводит к изменению частоты вращения ПД согласно выражению:
Изменение частоты вращения ПД в свою очередь приводит к изменению ЭДС ЭМУ: Еэму= Се*nпд*Фу;
изменение температуры приводит к изменению параметров электронных элементов. Значительное изменение температуры может привести к существенному изменению сопротивлений обмоток возбуждения и якорных обмоток электрических машин (изменятся статические характеристики машин).