

Эл. машины. Разделы 1, 2, 3
.pdfсопротивлении, что снижает к.п.д. Поэтому данный способ применяют в ДПТ небольшой мощности, не рассчитанных на длительную работу при пониженных скоростях вращения.
Рис. 46. Включение дополнительных сопротивлений в цепь якоря (а) и механические характеристики двигателя (б)
Изменение магнитного потока
Осуществляется при помощи регулировочного реостата Rp в цепи возбуждения (рис. 46, а). Так как двигатели рассчитываются для работы при номинальном режиме обычно с наибольшим значением магнитного потока, то практически этим способом можно регулировать скорость вращения только в одну сторону вверх от номинальной. Увеличение сопротивления Rp вызывает уменьшение тока возбуждения Iв и потока Ф. Уменьшение Ф приводит к увеличению оборотов. Из условия постоянства момента М=сМФI=const следует, что при уменьшении потока Ф соответственно увеличивается ток якоря I.
На |
рис. |
47 |
|
представлены |
|
|
механические характеристики двигателя |
|
|||||
параллельного |
возбуждения |
при |
|
|||
изменении его тока возбуждения. |
|
|||||
Уменьшенным |
значениям магнитного |
|
||||
потока |
соответствуют |
повышенные |
|
|||
скорости |
|
вращения |
(n2>n1>nн). |
|
||
Механические характеристики идут под |
|
|||||
некоторым углом, что соответствует |
|
|||||
некоторому понижению |
устойчивости |
|
||||
работы |
двигателя. |
Данный |
способ |
Рис. 47. Характеристики шунтового |
||
является |
наиболее |
экономичным и |
ДПТ при изменении потока |
|||
удобным.
Потери мощности в регулировочном реостате незначительные, поэтому в целом к.п.д. двигателя остается высоким.
Изменение питающего напряжения
Этот способ требует наличия регулируемого источника питания (например, статического или электромашинного преобразователя). К наиболее
51

распространенному типу схем регулирования скорости данным способом относится схема системы «генератор-двигатель» (Г-Д), или схема ВардЛеонарда (рис. 48, а).
Первичный двигатель ПД вращает с постоянной скоростью генератор Г. Якорь генератора непосредственно соединен с якорем двигателя Д. Обмотки независимого возбуждения генератора ОВГ и двигателя ОВД получают питание от источника постоянного напряжения. Потенциометрическим реостатом поста управления ПУ ток возбуждения Г можно менять как по величине, так и по направлению. При плавном регулировании тока возбуждения генератора происходит плавный пуск и плавное изменение скорости вращения двигателя. Механические характеристики такой системы представляют семейство параллельных прямых (рис. 48, б). На судах система Г- Д получила широкое применение в схемах гребных установок электроходов, для привода грузовых и буксирных лебедок, мощных брашпилей, в рулевых устройствах и пр.
Рис. 48. Схема (а) и механические характеристики (б) системы Г-Д
XII. Потери и к.п.д. машин постоянного тока
12.1. Виды потерь
Потери в электрических машинах складываются из механических потерь Рмех, потерь в стали якоря Рс, электрических Рэл и добавочных Рд потерь:
Р Рмех Рс Рэл Рд .
Механические потери Рмех состоят из потерь в подшипниках Рпш, потерь на трение щеток о коллектор Рк и вентиляционных потерь Рв – это потери от трения частей машины о воздух и иных вентиляционных потерь:
Рмех Рпш Рк Рв .
Механические потери не зависят от нагрузки, а зависят только от скорости вращения, и если она постоянна, могут считаться постоянными. Определяются механические потери по эмпирическим формулам. В МПТ они составляют 0,5-2% от номинальной мощности.
Потери в стали якоря состоят из потерь на гистерезис и вихревые токи:
Рс Рг Рвх ,
и связаны с перемагничиванием цепи якоря при его вращательном движении.
52
Обычно потери в стали не разделяются на составляющие и рассчитываются по эмпирическим формулам. Эти потери практически не зависят от нагрузки и при n=const могут считаться постоянными; они составляют 15-25% общих потерь.
Электрические потери включают в себя:
1)потери в обмотке якоря;
2)потери в обмотках возбуждения и в регулировочных реостатах;
3)потери в обмотке добавочных полюсов;
4)потери в компенсационной обмотке.
Потери в каждой из обмоток определяются по выражению Роб=I2Rоб, где Rоб – величина активного сопротивления соответствующей обмотки.
5) потери в щеточном контакте.
Электрические потери зависят от тока нагрузки (за исключением потерь в цепях независимого и параллельного возбуждения), т.е. являются переменными. Они составляют 50-60% общих потерь.
Добавочные потери возникают как в стали, так и в меди элементов машины. Обычно для МПТ при номинальной нагрузке их считают равными 0,5-1% от номинальной мощности.
12.2. Коэффициент полезного действия
К.п.д. машины определяется отношением полезной (отдаваемой) мощности Р2 ко всей потребляемой мощности Р1:
Р2 .
Р1
Таким образом, при известной суммарной мощности потерь выражение к.п.д. для генератора будет иметь вид
|
P2 |
|
UI |
|
, |
|
|
UI |
|
P |
|||
1 |
|
|
||||
|
P |
|
|
|
||
а для двигателя
P2 UI P .
P UI
1
Для машин малой (от 1 до 10 кВт) мощности η=0,75÷0,87, для машин средней (от 10 до 100 кВт) мощности η=0,85÷0,93, для машин большой (свыше
100 кВт) мощности η=0,92÷0,97.
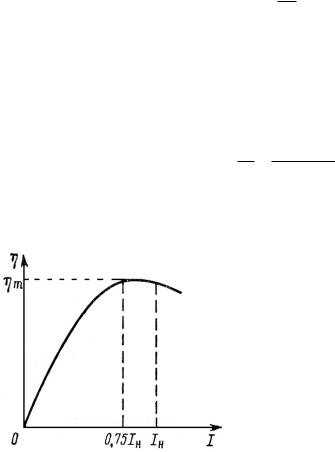
Кривая к.п.д. машины зависит от |
||||
нагрузки. |
На |
рис. |
49. |
Дана |
зависимость η=f(I) при U=Uн=const и |
||||
n=nн=const. К.п.д. с увеличением |
||||
нагрузки сначала быстро растет, при |
||||
нагрузке, близкой к номинальной, |
||||
достигает |
максимума, |
а |
затем |
|
уменьшается, |
так |
как |
рост |
|
электрических |
потерь (~I2) начинает |
|||
Рис. 49. Зависимость к.п.д. от нагрузки |
превышать рост полезной мощности. |
|
|
|
53 |

Раздел 3. Трансформаторы
I. Принцип действия однофазного трансформатора Трансформатором называется статический электромагнитный аппарат,
служащий для преобразования энергии переменного тока одного напряжения в другое при неизменной частоте.
Если, в первом приближении, пренебречь потерями, то подводимую к трансформатору мощность можно считать равной отводимой, поэтому преобразование величины напряжения в трансформаторе происходит с
одновременным преобразованием величины тока (при неизменной мощности
↑U→↓I, и наоборот).
В основном трансформаторы применяют в системах передачи и распределения электроэнергии. На судах при помощи трансформаторов создается несколько систем напряжения для обслуживания различных объектов судового хозяйства (различные электроприводы, системы освещения, обогрева и т.д.).
Трансформаторы разделяются на:
-однофазные и многофазные;
-повышающие и понижающие;
-двухобмоточные и многообмоточные.
Обмотка, получающая энергию, называется первичной. Обмотка, от которой отводится преобразованная энергия, называется вторичной. В основе работы трансформатора лежит электромагнитное взаимодействие первичной и
вторичной обмоток. |
|
|
|
||
На |
рис. |
50 |
показана |
|
|
принципиальная |
|
схема |
|
||
однофазного |
двухобмоточного |
|
|||
трансформатора. |
Подводимое к |
|
|||
первичной обмотке |
напряжение |
|
|||
U1 создает ток I1, образующий |
|
||||
магнитный поток Ф1, который |
|
||||
замыкается по магнитопроводу, и |
|
||||
поток |
рассеяния |
ФS1, |
|
||
сцепляющийся |
только |
с |
|
||
первичной обмоткой. |
Вследствие |
|
|||
малой величины потока ФS1 |
при |
|
|||
рассмотрении принципа действия |
Рис. 50. Принципиальная схема |
||||
трансформатора им пренебрегаем. |
трансформатора |
||||
Так как поток Ф1, переменный, то, пересекая первичную и вторичную обмотку, он наводит в них э.д.с. Е1 и Е2.
При разомкнутой вторичной цепи имеет место режим холостого хода трансформатора. При этом ток I1=I0 (здесь I0 – ток холостого хода). Первичная э.д.с. Е1 уравновешивает приложенное напряжение U1 E1, вторичная э.д.с. Е2 создает напряжение вторичной обмотки U2=E2.
При нагрузке вторичная обмотка трансформатора замыкается на
54

сопротивление ZН. Ток вторичной обмотки I2=U2/ZН создает в магнитопроводе поток реакции Ф2, который, суммируясь с Ф1, образует результирующий поток Ф (Ф=Ф1–Ф2). Кроме того, ток I2 создает поток рассеяния ФS2, которым здесь пренебрегаем. При нагрузке результирующий поток создаст в обмотках э.д.с. Е1
и Е2.
Пренебрегая падением напряжения в обмотках, можно и при нагрузке предполагать, что э. д. с. Е1 уравновешивает приложенное напряжение U1, а
э.д.с. Е2 равна напряжению вторичной обмотки, т.е. U1 E1 и U2 E2.
С увеличением тока I2 одновременно возрастает и ток I1. Это объясняется тем, что возрастающий вместе с током I2 поток Ф2 приводит к уменьшению результирующего потока Ф и э.д.с. Е1. Вследствие возросшей разности U1 и E1 увеличивается ток I1 в первичной цепи. Ток I1 вызывает возрастание потока Ф1. В итоге результирующий поток Ф при всех нагрузках остается практически постоянным (Ф=Ф1–Ф2≈const).
II. Устройство трансформаторов
Основной элемент трансформатора – так называемая активная часть, представляющая собой совокупность магнитопровода и обмоток. С целью уменьшения потерь в магнитопроводе последний собирается из отдельных листов электротехнической стали (толщина листов, как правило, 0,5 и 0,35 мм). Листы магнитопровода изолированы друг от друга лаковым слоем или тонким слоем окислов на поверхности листа. Иногда (у трансформаторов малой мощности) магнитопровод выполняют витым из стальной ленты.
Магнитопровод может иметь стержневую или броневую конструкцию (рис. 51). Силовые трансформаторы в основном выполняются стержневыми, а броневые применяются в радиотехнике и иных специальных областях.
На стержнях магнитопровода располагаются обмотки низшего (Н.Н.) и высшего (В.Н.) напряжения.
Рис. 51. Стержневой (а) и броневой (б) трансформаторы
Активная часть трансформатора помещается в корпус. Судовые
трансформаторы |
выполняются сухими (без масла в корпусе); мощные |
|||
трансформаторы |
береговых |
подстанций |
часто |
выполняются |
|
|
55 |
|
|

маслонаполненными (масляными), у которых магнитопровод с обмоткой помещают в бак с трансформаторным маслом, являющимся хорошим изолятором (это улучшает охлаждение трансформатора).
III. Э.д.с. трансформатора
Результирующий магнитный поток, пересекая обмотки, наводит в них
э.д.с.
e w ddtФ .
Если поток – синусоидальная функция времени Ф=Фmsin t, то э.д.с. обмотки
|
|
|
|
e w Фm cos t w Фm sin t |
|
Em sin t |
. |
|
2 |
|
2 |
Э.д.с. обмотки e отстает по фазе от создавшего ее потока на угол /2. Максимальное значение э.д.с.
Em w2 fФm 
 2E.
2E.
Действующее значение э.д.с.
E 2 2 wfФm 4 2 2 wfФm ,
или в вольтах
E 4kФwfФm ,
где kф 2 2 – коэффициент формы кривой (для синусоиды kф=1,11).
Э.д.с. обмоток трансформатора
E1 4,44w1 fФm , E2 4,44w2 fФm .
IV. Режим холостого хода трансформатора
Схема опыта холостого хода приведена на рис. 52. Синусоидальное напряжение U1,
приложенное к первичной обмотке, в каждый момент времени уравновешивается э.д.с. Е1, создаваемой потоком Ф, который, следовательно, также изменяется синусоидально.
Поток Ф создается током х.х. в Рис. 52. Схема опыта х.х. первичной обмотке и, в силу наличия у
трансформатора стального сердечника зависимость Ф от тока выражается гистерезисной петлей. Ток х.х. I0, создающий синусоидальный поток, имеет несинусоидальную форму, и первая гармоническая этого тока опережает поток на угол гистерезисного опережения (угол потерь в стали) α.
Векторная диаграмма режима х.х. представлена на рис. 53. Ток холостого хода I0, составляющий (5÷10)% номинального значения I1, содержит активную
56

составляющую I0А, обусловленную потерями в стали (с углом между Ф и I0А), и реактивную составляющую I0Р – намагничивающий ток, создающий основной магнитный поток Ф. Поток Ф создает э.д.с. E1 и E2, отстающие от потока на угол /2. Кроме того, ток I0 создает в первичной обмотке поток рассеяния ФS1, который наводит э.д.с. рассеяния ES1. Поток ФS1, замыкающийся в основном по воздуху, совпадает по фазе с током I0, а э.д.с. ES1 отстает от него на угол /2. При этом
ES1 jI0 X1 ,
где X1 – индуктивное сопротивление рассеяния первичной обмотки. Для напряжения U1 справедливо
U1 E I0 R1 jI0 X1 ,
т.е. приложенное напряжение сети в основном уравновешивается э.д.с. Е1 и частично теряется в активном и индуктивном сопротивлениях первичной обмотки.
На диаграмме для ясности увеличены векторы I0R1 и I0X1, составляющие не более 0,5% от U1. Ток I0 отстает от U1 по фазе на угол, близкий к /2 (т.к. угол потерь в стали очень мал и составляет 2- 3 ). Коэффициент мощности (cos ) в режиме х.х. не превышает 0,2-0,3, поэтому этот режим нежелателен (для мощных трансформаторов).
Врежиме х.х. определяют:
1.Коэффициент трансформации – это отношение э.д.с. высшей стороны трансформатора к э.д.с.
низшей стороны. Предполагая, что Е1>Е2, получим
|
|
K |
E1 |
|
w1 |
|
|
U1 |
. |
|
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
E2 |
|
w2 |
U2 |
|
||||||
|
Пренебрегая |
потерями, |
можно |
записать, что |
|||||||||
|
U1I1=U2I2, откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
I 2 |
. |
|
|||||
Рис. 53. Векторная |
|
|
U 2 |
I1 |
|
||||||||
|
|
|
|
|
|
|
|
||||||
2. Потери в |
стали. |
Мощность, |
потребляемая |
||||||||||
диаграмма |
трансформатором в режиме х.х., идет на покрытие |
||
трансформатора в режиме |
|||
потерь в стали Рс |
(потерями в меди первичной |
||
х.х. |
|||
обмотки пренебрегаем в силу малости тока I0). |
|||
|
|||
3. Сопротивления холостого хода. Полное сопротивление трансформатора в режиме х.х. Z0=U1/I0. Активное сопротивление, обусловленное потерями в
стали R0=P0/I02. Индуктивное сопротивление X0 
 Z02 R02 .
Z02 R02 .
V. Приведенный трансформатор
Для возможности построения векторной диаграммы трансформатора при нагрузке реальный трансформатор с коэффициентом трансформации К 1
57

заменяют эквивалентным трансформатором с коэффициентом трансформации К=1. Такой трансформатор называется приведенным. В приведенном трансформаторе первичная обмотка остается неизменной; вторичная же с числом витков w2 у реального трансформатора заменяется в приведенном обмоткой с числом витков w1. Эквивалентность реального и приведенного трансформатора состоит в том, что все мощности их вторичных обмоток и все фазы векторов вторичных величин остаются неизменными при переходе от реального трансформатора к приведенному.
Э.д.с. на один виток вторичной обмотки
e2 E2 4,44 fФ. w2
Э.д.с. вторичной обмотки приведенного трансформатора на w1 витков
E2' e2 w1 E2 w1 E2 K E1. w2
Из условия равенства вторичных мощностей реального и приведенного трансформаторов
E2 I 2 cos 2 E2' I2' cos 2
получим
I ' |
I |
|
E2 |
|
I 2 |
. |
|
2 E |
|
|
|||||
2 |
|
' |
|
K |
|||
|
|
|
|
2 |
|
|
|
Из условия равенства потерь вторичных обмоток
I22 R2 I2'2 R2'
получим
|
' |
|
|
|
I2 |
|
2 |
2 |
|
|
|
|
|
|
|
R2 K |
|
||||
R2 |
|
|
' |
|
, |
|||||
R2 |
|
|
||||||||
|
|
|
|
|
I2 |
|
|
|
|
|
X ' |
X |
2 |
K 2 |
, |
|
|
|
|||
|
2 |
|
|
|
|
|
|
|
|
|
Z |
' |
Z |
2 |
K 2 . |
|
|
|
|
||
|
2 |
|
|
|
|
|
|
|
|
|
VI. Работа трансформатора под нагрузкой
Напряжение U1 (рис. 50) практически постоянно, а вследствие малости I1R1 и I1X1 можно считать, что U1 –Е1=const. Поток Ф также будет практически постоянен, поэтому создающий его ток I0Р также постоянен, как и ток I0А (потому что при Ф=const потери в стали также постоянны). То есть при всех
режимах I0 
 I02A I02P const .
I02A I02P const .
Результирующий магнитный поток также будет практически постоянен при любом режиме работы трансформатора, Ф1–Ф2 Ф0 const. Ф0 – поток, создаваемый в режиме х.х. намагничивающей силой (м.д.с.) I0w1. Под нагрузкой появляется н.с. I2w2, создающая поток Ф2, направленный навстречу потоку первичной обмотки. Поэтому результирующий магнитный поток в трансформаторе ослабляется, Ф Е1 I1=(U1-E1)/Z1. Увеличение тока I1 происходит до тех пор, пока не восстановится равновесие Ф=Ф1–Ф2 Ф0. Отсюда следует, что сумма н.с. при всяком изменении режима работы равна
58

н.с. режима х.х.:
Iw1 I2w2 I0w1.
(это же равенство можно получить и из выражений для потока: при х.х. Ф I0 w1
R
и при нагрузке Ф I1w1 I2 w2 ; здесь Rμ – магнитное сопротивление потоку Ф).
R
Разделив данное выражение на w1, получим уравнение токов трансформатора
|
I1 |
|
|
0. |
|
I2 I |
|||
|
|
|
|
|
Как и в режиме х.х., для первичного напряжения справедливо |
||||
U1 |
E1 I1r1 |
jI1 x1. |
||
|
|
|
|
|
Э.д.с. вторичной обмотки |
U 2 |
I 2 r2 |
jI 2 x2 . |
|
E2 |
||||
|
|
|
|
|
Векторная диаграмма показана на рис. 54. Порядок еѐ построения |
||||
|
|
следующий: |
||
|
|
1. |
вектор Ф; |
|
|
|
2. |
векторы Е1=Е2 (отстают от потока Ф |
|
|
|
на угол π/2); |
||
|
|
3. вектор I0 – под углом к Ф |
||
|
|
(опережает); |
||
|
|
4. |
вектор I2 – под углом 2 к Е2 (отстает, |
|
|
|
т.к. нагрузку считаем активно- |
||
|
|
индуктивной); |
||
|
|
5. I0+(–I2 )=I1; |
||
|
|
6. |
векторы ФS1 и ФS2 – совпадают по |
|
|
|
направлениям с I1 и I2 соответственно; |
||
|
|
7. |
|
|
|
|
вектор ЕS1 ФS1, вектор ЕS2 ФS2 (оба |
||
|
|
отстают); |
||
|
|
8. |
вектор –Е1; |
|
|
|
9. |
из конца вектора –Е1 строим I1r1; |
|
|
|
10. I1х1 I1r1; |
||
Рис. 54. Векторная диаграмма |
11. вектор U1 строим из нуля в конец |
|
вектора I1х1; |
||
трансформатора при нагрузке |
||
|
12.из конца вектора Е2 строим I2 х2 , при этом I2 х2 =–ЕS2 по величине;
13.строим I2 r2 , параллельный I2 ;
14.строим вектор U2.
Для трансформатора можно составить электрическую схему замещения, вид которой приведен на рис. 55.
59

Рис. 55. Схема замещения трансформатора
VII. Короткое замыкание трансформатора
Опыт короткого замыкания проводят по схеме, изображенной на рис. 56.
Рис. 56. Схема опыта короткого замыкания
В ходе опыта принимаются меры по ограничению тока, например, путем включения дросселя в цепь первичной обмотки (понижает напряжение U1K).
Опыт к.з. позволяет определить:
1. Напряжение короткого замыкания. Номинальным напряжением короткого замыкания UК называется такое подведенное к трансформатору напряжение при коротком замыкании вторичной обмотки, выраженное в процентах к номинальному, при котором в обмотках устанавливается номинальный ток.
UК U1К 100%.
U1Н
2.Сопротивления короткого замыкания.
3.Потери короткого замыкания. Состоят из потерь в меди обмоток и
добавочных потерь, обусловленных вытеснением тока: РК=РМ1+РМ2+РД. Потерями в стали в данном режиме пренебрегают в силу малости потока при
пониженном напряжении (величина UК составляет 5-10% номинального напряжения; так как поток прямо пропорционален напряжению питания трансформатора, а потери в сердечнике пропорциональны квадрату потока, то в режиме короткого замыкания потерями в сердечнике можно пренебречь).
VIII. Внешняя характеристика трансформатора
При увеличении нагрузки вторичное напряжение трансформатора уменьшается, т.к. растут падения напряжения в обмотках. Величина изменения вторичного напряжения от холостого хода до номинального тока
U U20 U2 100%
U20
является важной характеристикой трансформатора (как правило, у
60