

Динамика билеты / 21Материальные системы. Масса, центр масс. Количество
.docxМеханическая система
Механическая система - совокупность материальных точек: - движущихся согласно законам классической механики; и - взаимодействующих друг с другом и с телами, не включенными в эту совокупность.
Ма́сса
Масса проявляется в природе несколькими способами.
Пассивная гравитационная масса[1] показывает, с какой силой тело взаимодействует с внешними гравитационными полями — фактически эта масса положена в основу измерения массы взвешиванием в современной метрологии.
Активная гравитационная масса[2] показывает, какое гравитационное поле создаёт само это тело — гравитационные массы фигурируют в законе всемирного тяготения.
Инертная масса характеризует инертность тел и фигурирует в одной из формулировок второго закона Ньютона. Если произвольная сила винерциальной системе отсчёта одинаково ускоряет разные исходно неподвижные тела, этим телам приписывают одинаковую инертную массу.
Гравитационная и инертная массы равны друг другу (с высокой точностью — порядка 10−13 — экспериментально, а в большинстве физических теорий, в том числе всех, подтверждённых экспериментально — точно), поэтому в том случае, когда речь идёт не о «новой физике», просто говорят о массе, не уточняя, какую из них имеют в виду.
В классической механике масса системы тел равна сумме масс составляющих её тел. В релятивистской механике масса не является аддитивной физической величиной, то есть масса системы в общем случае не равна сумме масс компонентов, а включает в себя энергию связи и зависит от характера движения частиц друг относительно друга
Центр масс — (в механике) геометрическая точка, характеризующаядвижение тела или системы частиц, как целого[1]. Не является тождественным понятию центра тяжести (хотя чаще всего совпадает).
Положение центра масс (центра инерции) системы материальных точек в классической механике определяется следующим образом[2]:

где ![]() — радиус-вектор центра
масс,
— радиус-вектор центра
масс, ![]() —
радиус-вектор i-й точки
системы,
—
радиус-вектор i-й точки
системы, ![]() — масса i-й
точки.
— масса i-й
точки.
Для случая непрерывного распределения масс:

![]()
где ![]() —
суммарная масса системы,
—
суммарная масса системы, ![]() —
объём,
—
объём, ![]() —
плотность. Центр масс, таким образом,
характеризует распределение массы по
телу или системе частиц.
—
плотность. Центр масс, таким образом,
характеризует распределение массы по
телу или системе частиц.
Можно
показать, что если система состоит не
из материальных точек, а из протяжённых
тел с массами ![]() ,
то радиус-вектор центра масс такой
системы
,
то радиус-вектор центра масс такой
системы ![]() связан
с радиус-векторами центров масс
тел
связан
с радиус-векторами центров масс
тел ![]() соотношением[3]:
соотношением[3]:
Иначе говоря, в случае протяжённых тел справедлива формула, по своей структуре совпадающая с той, что используется для материальных точек.
В механике!!!
Понятие центра масс широко используется в механике и физике.
Движение твёрдого тела можно рассматривать как суперпозицию движения центра масс и вращательного движения тела вокруг его центра масс. Центр масс при этом движется так же, как двигалось бы тело с такой же массой, но бесконечно малыми размерами (материальная точка). Последнее означает, в частности, что для описания этого движения применимы все законы Ньютона. Во многих случаях можно вообще не учитывать размеры и форму тела и рассматривать только движение его центра масс.
Часто бывает удобно рассматривать движение замкнутой системы в системе отсчёта, связанной с центром масс. Такая система отсчёта называется системой центра масс (Ц-система), или системой центра инерции. В ней полный импульс замкнутой системы всегда остаётся равным нулю, что позволяет упростить уравнения её движения.
Центры масс однородных фигур
У отрезка — середина.
У многоугольников (как сплошных плоских фигур, так и каркасов):
У параллелограмма — точка пересечения диагоналей.
У треугольника — точка пересечения медиан (центроид).
У правильного многоугольника — центр поворотной симметрии.
У полукруга - точка, делящая перпендикулярный радиус в отношении 4:3π от центра круга.
Количество движения = импульс
Количество движения системы (импульс системы).
Количество движения (импульс тела) – векторная физическая величина, равная произведению массы тела на его скорость:
![]()
Импульс (количество движения) – одна из самых фундаментальных характеристик движения тела или системы тел.
Запишем II закон
Ньютона в другой форме, учитывая, что
ускорение ![]() Тогда
Тогда ![]() следовательно
следовательно
![]()
Произведение силы на время ее действия равно приращению импульса тела (рис. 1):
![]()
Где ![]() -
импульс силы, который показывает, что
результат действия силы зависит не
только от ее значения, но и от
продолжительности ее действия.
-
импульс силы, который показывает, что
результат действия силы зависит не
только от ее значения, но и от
продолжительности ее действия.

Рис.1
Количеством
движения системы (импульсом) будем
называть векторную величину ![]() , равную
геометрической сумме (главному
вектору) количеств движения (импульсов)
всех точек системы (рис.2):
, равную
геометрической сумме (главному
вектору) количеств движения (импульсов)
всех точек системы (рис.2):
![]()
Из чертежа
видно, что независимо от величин скоростей
точек системы (если только эти скорости
не параллельны) вектор ![]() может
принимать любые значения и даже оказаться
равным нулю, когда многоугольник,
построенный из векторов
может
принимать любые значения и даже оказаться
равным нулю, когда многоугольник,
построенный из векторов ![]() ,
замкнется. Следовательно, по
величине
,
замкнется. Следовательно, по
величине ![]() нельзя
полностью судить о характере движения
системы.
нельзя
полностью судить о характере движения
системы.

Рис.2
Найдем
формулу, с помощью которой значительно
легче вычислять величину ![]() , а
также уяснить ее смысл.
, а
также уяснить ее смысл.
Из равенства
![]()
следует, что
![]()
Беря от обеих частей производную по времени, получим
![]()
Отсюда
находим, что ![]()
количество движения (импульс) системы равно произведению массы всей системы на скорость ее центра масс. Этим результатом особенно удобно пользоваться при вычислении количеств движения твердых тел.
Из формулы видно, что если тело (или система) движется так, что центр масс остается неподвижным, то количество движения тела равно нулю. Например, количество движения тела, вращающегося вокруг неподвижной оси, проходящей через его центр масс, будет равно нулю.
Если же
движение тела является сложным, то
величина ![]() не
будет характеризовать вращательную
часть движения вокруг центра масс.
Например, для катящегося колеса
не
будет характеризовать вращательную
часть движения вокруг центра масс.
Например, для катящегося колеса ![]() независимо
от того, как вращается колесо вокруг
его центра масс С.
независимо
от того, как вращается колесо вокруг
его центра масс С.
Таким
образом, количество движения
характеризует только поступательное
движение системы. При сложном
же движении величина ![]() характеризует
только поступательную часть движения
системы вместе с центром масс.
характеризует
только поступательную часть движения
системы вместе с центром масс.
Главный момент количеств движения (импульса) системы.
Главным
моментом количеств движения (или
кинетическом моментом) системы
относительно данного центра О называется
величина ![]() ,
равная геометрической сумме моментов
количеств движения всех точек системы
относительно этого центра.
,
равная геометрической сумме моментов
количеств движения всех точек системы
относительно этого центра.
![]()
Аналогично определяются моменты количеств движения системы относительно координатных осей:
![]()
При
этом ![]() представляют
собою одновременно проекции вектора
представляют
собою одновременно проекции вектора ![]() на
координатные оси.
на
координатные оси.
Подобно тому, как количество движения системы является характеристикой ее поступательного движения, главный момент количеств движения системы является характеристикой вращательного движения системы.
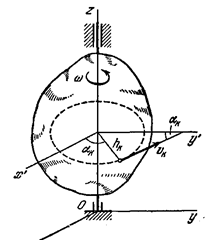
Рис.6
Чтобы
уяснить механический смысл величины L0 и
иметь необходимые формулы для решения
задач, вычислим кинетический момент
тела, вращающегося вокруг неподвижной оси
(рис.6).При этом, как обычно,
определение вектора ![]() сводится
к определению его проекций
сводится
к определению его проекций ![]() .
.
Найдем сначала наиболее важную для приложений формулу, определяющую величину Lz, т.е. кинетический момент вращающегося тела относительно оси вращения.
Для любой
точки тела, отстоящей от оси вращения
на расстоянии ![]() ,
скорость
,
скорость ![]() .
Следовательно, для этой точки
.
Следовательно, для этой точки ![]() .
Тогда для всего тела, вынося общий
множитель ω за скобку, получим
.
Тогда для всего тела, вынося общий
множитель ω за скобку, получим
![]()
Величина, стоящая в скобке, представляет собою момент инерции тела относительно оси z. Окончательно находим
![]()
Таким образом, кинетический момент вращающегося тела относительно оси вращения равен произведению момента инерции тела относительно этой оси на угловую скорость тела.
Если система состоит из нескольких тел, вращающихся вокруг одной и той же оси, то, очевидно, будет
![]()
Легко видеть
аналогию между формулами ![]() и
и ![]() :
количество движения равно произведению
массы (величина, характеризующая
инертность тела при поступательном
движении) на скорость; кинетический
момент равен произведению момента
инерции (величина, характеризующая
инертность тела при вращательном
движении) на угловую скорость.
:
количество движения равно произведению
массы (величина, характеризующая
инертность тела при поступательном
движении) на скорость; кинетический
момент равен произведению момента
инерции (величина, характеризующая
инертность тела при вращательном
движении) на угловую скорость.