

Principle of rational approximation
In the principle of rotational
approximation, a desired frequency is measured by comparing it with a
standard frequency. However, not by simple pulses count in a time
sample, but using the special mathematic framework introduced in
[16-18]. The zero crossings of both frequencies are detected, forming
two regular independent narrow pulse trains (see Fig. 7). The desired
and standard trains of narrow pulses are compared for coincidence.
This comparison is made using an AND gate. A coincidence pulse train
 is generated. The coincident pulses can be used as triggers to start
and stop a pair of digital counters
is generated. The coincident pulses can be used as triggers to start
and stop a pair of digital counters (see Fig. 8).
(see Fig. 8).
The standard and desired pulse
trains are applied to the counters and a measure of the desired
frequency is obtained by multiplying the known standard frequency by
the ratio of the desired count and the standard count obtained with
the two digital counters P and Q. Consider
 as the desired or unknown frequency and
as the desired or unknown frequency and as the standard frequency.
as the standard frequency.
 Fig.7. Process of direct
frequency comparison: geometric theory of coincidence transformation.
Fig.7. Process of direct
frequency comparison: geometric theory of coincidence transformation.
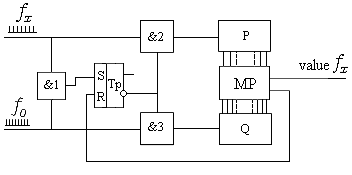
Fig.8. The frequency meter block diagram.
In Fig. 7,
 and
and
 are
the unknown and standard trains of narrow pulses, respectively,with
frequencies fx
and f0.
The pulses widths in both trains of Fig. 7 are τ. Consider
are
the unknown and standard trains of narrow pulses, respectively,with
frequencies fx
and f0.
The pulses widths in both trains of Fig. 7 are τ. Consider
 as the greatest common divisor (gcd) of both periods
as the greatest common divisor (gcd) of both periods and
and .
. represents a minimally distinguishable time interval and indirectly a
quantum, which as shown below, is defined by the stability of the
standard frequency.
represents a minimally distinguishable time interval and indirectly a
quantum, which as shown below, is defined by the stability of the
standard frequency. and
and are independent parameters (this must to be a keynote for any
simulation of this process).
are independent parameters (this must to be a keynote for any
simulation of this process).
There exists a pair of narrow pulses in the pulse trains which exactly coincide on the time axis. This first, completely coincident pair of pulses (Fig. 7) is designated with zero indexes. This pair pulses is a command to start the frequency measurement by device presented on Fig.8.
Correspondingly
to the mentioned above, both unknown and standard frequencies fx
and f0
are input to the circuit. &-gate &1 verifies the coincidences
in time domain between trains
 and
and
 ,
and opens count of pulses by independent counters P and Q (on Fig.8)
at the first coincidence using RS-trigger. Microprocessor MP controls
this process by set/reset of RS-trigger when each next coincidence
occurs (see real-time process on Fig.7).
,
and opens count of pulses by independent counters P and Q (on Fig.8)
at the first coincidence using RS-trigger. Microprocessor MP controls
this process by set/reset of RS-trigger when each next coincidence
occurs (see real-time process on Fig.7).

 and
and are the numbers of counted pulses from the
are the numbers of counted pulses from the
 and
and
 sequences that occur between adjacent coincidences.MP
(Fig.8) saves in memory independently all values of pair
sequences that occur between adjacent coincidences.MP
(Fig.8) saves in memory independently all values of pair
 and
and on
each n-th
coincidence occurrence.
Between two completely coincident pairs (see
Fig.7), which
correspond to pulses number 0 and 17 of the reference frequency
sequence
on
each n-th
coincidence occurrence.
Between two completely coincident pairs (see
Fig.7), which
correspond to pulses number 0 and 17 of the reference frequency
sequence
 ,
there also exist some partial coincidences. Adjacent coincidences may
be either partial or total. The indexn
refers to either partial or total coincidences.
,
there also exist some partial coincidences. Adjacent coincidences may
be either partial or total. The indexn
refers to either partial or total coincidences.
For the considered particular example in Fig. 7, for the second and the third partially coincident pairs, respectively:
 (1)
(1)
Fractions
 ,
, each independently can be used for an estimation of the unknown
frequency. In this case, both of these values are better
approximation to measured parameter of any automotive FDS sensors
(see Fig. 3), than the value obtained in a classical measurement
algorithm (Fig.1).
each independently can be used for an estimation of the unknown
frequency. In this case, both of these values are better
approximation to measured parameter of any automotive FDS sensors
(see Fig. 3), than the value obtained in a classical measurement
algorithm (Fig.1).
On the other hand, if we have any two fractions, they can form a mediant fraction as follows [16, 38]:
 (2)
(2)
Thus, in our case
 and
and are approximants to each other and to the mediant formed by them.
That is,
are approximants to each other and to the mediant formed by them.
That is,
 (3)
(3)
The mediant and its approximants have the following common fundamental property:
 (4)
(4)
The mediant can be generalized in this form
 (5)
(5)
where n
is the number of the fraction and m
is the number of the mediant, both written in parenthesis in (5).
According to the definition in [36, 37], the mediant is the fraction
formed by two fractions
 and
and in the next way:
in the next way:
[mediant
fraction] =

Thus, a mediant can be formed with a minimum of two fractions. In this case, the number of the fractions is n=2 and the corresponding number of the mediant is m=1. That is, the number of the mediant is always one unit less than number of the fraction under consideration.
The mediant also can be formed
by three fractions with numbers n=1,
2, 3 ([mediant
fraction] =
 ).
In this case their mediant is formed by
the last fraction
).
In this case their mediant is formed by
the last fraction
 (n=3)
and the previous mediant of the fractions n=1
and n=2.
(n=3)
and the previous mediant of the fractions n=1
and n=2.
From (5) we can consider two sums:
-  sum
of numerators of all n fractions, which form the mediant m.
sum
of numerators of all n fractions, which form the mediant m.
-  sum
of denominators of all n fractions, which form the mediant m.
sum
of denominators of all n fractions, which form the mediant m.
These sums automatically
provide back-to-back continuous (without dead-time) averaging
throughout the measuring time. The ratio of the frequencies can be
considered as an irrational number,

 .
Since the mediant
.
Since the mediant is closer to α, than its forming fractions, it is possible to accept
is closer to α, than its forming fractions, it is possible to accept ,
and
,
and
 , (6)
, (6)
where fxm is the approximation of unknown frequency value fx by the m-th mediant.
The relative value of the
systematic measurement error (frequency offset) using (6) can be written as follows:
(frequency offset) using (6) can be written as follows:
 (7)
(7)
In [19, 20], it has been shown that approximants and their mediants can be used to directly compare an unknown frequency with a known one. Using approximants and their mediants the value of unknown frequency and its systematic error can be defined.
In a sequence of mediants


 (8)
(8)
it is possible to choose one
[16, 19] that satisfies (5) in this way
 (9)
(9)
By means of the gcd
 ,
it is possible to represent the periods
,
it is possible to represent the periods
 by numbers
by numbers

 .
Then,
.
Then,

 is a common multiple.
is a common multiple.
Thus, we have 

 ,
the accepted decimal notation that the mediant, which provides the
best approximation for
,
the accepted decimal notation that the mediant, which provides the
best approximation for

 and the greatest possible accuracy for
and the greatest possible accuracy for

 ,
has a numerator of the form
,
has a numerator of the form

 .
.
This feedback signal resets the trigger to initial state. It means the numerator is in the form of “one with r zeros” and it is easy to achieve a desired accuracy in hardware counting of least significant bits in counter P. This is a stop signal for the end of the measurement process and it allows constructing time keeping systems or frequency meters with set accuracy and duration of measurements.
At the same time, the
measurement of the parameter of any automotive FDS (see Fig. 3),
converted into proportional frequency (or nominal frequency changes
Δf),
is finished too. In [16], it is proved that at this moment the
readout result in the counter
 is the best proportional approximation of measured frequency true
value on the given interval of time.
is the best proportional approximation of measured frequency true
value on the given interval of time.
At this point, it is expedient note that the absolute time of such measurement is significantly less than the result of the classical method mentioned in Fig.1 and in [3]. In fact, for any classical frequency count method the time sampling interval is 1s as a rule and it has associated a “±1 count error” (i.e., the quantization error of ±1 cycle) [3, 16]. Whereas the method of rational approximation presented in this paper has shorter time of measurement.