

4.2 Система управления роботом-манипулятором для одной степени свободы
Контроллер EPOS был подключен непосредственно к двигателю, приводящему в движение один из узлов манипулятора, сам контроллер подключается к компьютеру по протоколу RS232.
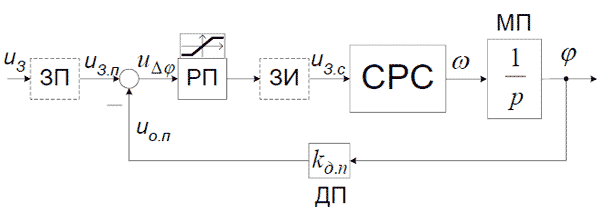
Cистема управления электроприводом робота-манипулятора представляет из себя классическую трёхконтурную СПР по положению.
 Рисунок
7 – Обобщённая схема системы регулирования
положения
Рисунок
7 – Обобщённая схема системы регулирования
положения
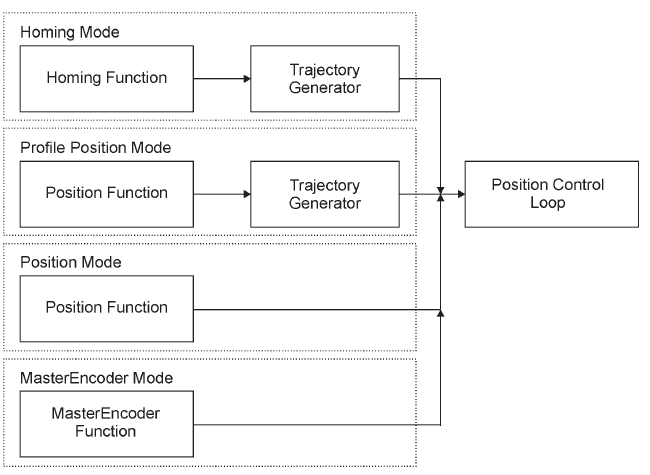
Для правильной настройки контура положения используется генератор траекторий в качестве задатчика положения и различные методы коррекции. В целом, они либо допускают небольшое перерегулирование, которое допустимо для робота-манипулятора, либо используют посадочную скорость. Величина посадочной скорости и ширина области дотягивания задаётся настройщиком. Так как любая степень свободы робота имеет изменяющуюся в зависимости от положения манипулятора инерцию, зависящую также от объекта, который перемещается манипулятором, построить одну кривую для всех перемещений крайне затруднительно. Поэтому и используются принципы, допускающие перерегулирование или дотягивание. При необходимости, можно задать кривую самостоятельно, напрямую запрограммировав работу генератора траекторий [6].
 Рисунок
8 – Структура задатчика положения в
контроллере EPOS
Рисунок
8 – Структура задатчика положения в
контроллере EPOS
4.3 Алгоритм податливости
Алгоритм податливости является внешним контуром для СПР по положению и на данном этапе работы представляет единственную систему, дающую задание на положение. В дальнейшем её требуется скомбинировать с заданием на положение от оператора, для обеспечения механизма податливости в динамических режимах, который не рассматривается в данной работе.
Алгоритм податливости представляет собой контур с П-регулятором описываемый следующим уравнением:
![]()
Где: θi – задание на положение на предыдущем шаге
θi+1 –задание на положение на текущем шаге
Δθ – изменение положения, вызванное возмущающим воздействием
K – коэффициент усиления П-регулятора
Таким образом при К >0 происходит усиление возмущения и «убегание» манипулятора, которое позволяет облегчить управление им вручную. При K< 0 манипулятор сопротивляется возмущению и стремиться вернуться в исходное положение.
Режим K < 0 требуется только в случае снижения динамической нагрузки и коррекции жесткости контура регулирования положения.
Режим K > 0 и является режимом податливости. Так как из-за убегания манипулятора от возмущающего воздействия, фактическая величина этого воздействия уменьшается, то убегание прекращается. В результате достигается равновесный режим в виде кратких циклов возмущения-убегания, позволяющих уменьшить внешнюю силу, необходимую для движения манипулятора. Единственным недостатком данного алгоритма является необходимость преодоления статического трения узлов манипулятора. Для небольших манипуляторов данный недостаток несущественен, так как не нужно прикладывать значительное усилие для его преодоления. В случае, если у манипулятора значительная величина статического трения, то данный недостаток проявляется значительнее и может привести к невозможности взаимодействия манипулятора и человека.
Одним из важных факторов является отработка задания, подаваемого алгоритмом податливости. Она зависит от коэффициентов регуляторов системы подчинённого регулирования.