

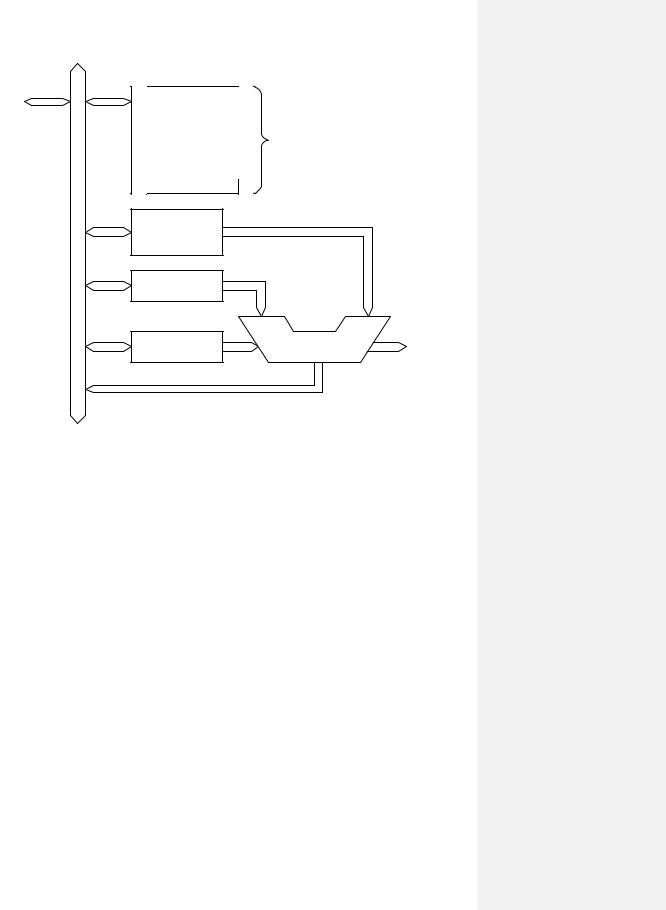
Рис. 2.3. Схематичне зображення тракту даних ЕОМ
Тракт даних працює таким чином: в один чи два регістри заносяться операнди, АЛП виконує над ними певну операцію, наприклад додавання, після чого результат знову поміщається в один з регістрів і пізніше назад в оперативну пам’ять якщо цей результат є кінцевим.
На деяких ЕОМ робота тракту даних контролюється особливою програмою, яку називають мікропрограмою, на інших спеціальними апаратними засобами – пристроєм керування.
1.1.3Пристрій керування
Основне завдання пристрою керування це генерувати сигнали керування, що ініціюють виконання послідовності мікрооперацій арифметико-логічним пристроєм. Генерована пристроєм керування послідовність сигналів визначається кодом операції команди та сигналами сповіщення. Для цього задіюються регістр команд, дешифратор коду операції, блок керування операціями, давач сигналів, лічильник команд, які в сумі й становлять пристрій керування.
Виконання команди пристроєм керування можна розбити на кілька функціонально завершених дій (етапів), що становлять її цикл.
Перший етап – зчитування і дешифрування команди. Для цього код з лічильника команд необхідно передати
в ОЗП: тобто звернутися в комірку ОЗП з адресою і вміст цієї комірки передати на регістр команд. Це й буде необхідний код команди.
Регістр команд призначений для зберігання в процесорі зчитаної з ОЗП команди на час її виконання. Далі дешифратор коду операції визначає тип команди після чого на виходах ПК формуються сигнали керування, які необхідні для усього циклу виконання команд аж до занесення в РК нової команди.
Основні команди мікропроцесора можуть займати від одного до декількох байт. Код операції завжди міститься в першому байті, а подальші байти, якщо вони є, містять адресну інформацію. Окрім того, щоб змінити певний режим виконання операції, встановлений за замовчуванням, перед байтом коду операції, може бути вміщено один чи кілька байтів – префіксів команди.
Другий |
етап |
– |
вибірка |
першого |
операнду ( |
). Для цього код |
|
адреси першого операнду |
з РК необхідно передати в ОЗП: тобто звер- |
||||||
нутися до комірки з адресою |
в ОЗП і код цієї комірки передати в |
||||||
акумулятор. |
|
|
вибірка |
другого |
операнду ( |
|
|
Третій |
етап |
– |
). Виконується |
||||
аналогічно з другим етапом, але код передається не в акумулятор, а на один із вхідних регістрів АЛП.
Четвертий етап – виконання операції. Ще у кінці першого етапу дешифратор коду операцій визначив тип виконуваної команди й сформував для цього усі необхідні сигнали керування. Операнди були передані на входи АЛП на другому і третьому етапах. Таким чином АЛП виконує необхідні дії над підготованими даними й результат заносить в акумулятор. Окрім цього в регістрі ознак АЛП зберігається ознака результату.
П’ятий етап – звернення до ОЗП та збереження результату операції. Тут код поля з регістру команд передається в ОЗП, тобто в комірку пам’яті за цією адресою заноситься результат операції з акумулятора. Ознака результату заноситься із регістру ознак АЛП в регістр прапорців, звідки його можна за необхідності зчитати пізніше.
Шостий етап – формування адреси ОЗП, де перебуває наступна команда, тобто заміна старого коду в ЛК на новий. Оскільки в ЕОМ передбачено природній порядок виконання програми, то наступна команда знаходиться в комірках ОЗП, що слідують відразу за комірками, зайнятими виконаною командою. Якщо прийняти, що виконана команда займала в пам’яті комірок, тоді суть цього етапу полягає в зміні лічильника команд на : .
Сьомий етап – зупинка. Наведена послідовність етапів повторюється в подальшому для кожної з наступних команд програми. Таким чином
забезпечується принцип автоматичної роботи: машина виконує записану в її пам’яті програму без участі людини, тобто функціонує автоматично. Цей процес буде виконуватись до тих пір, поки не буде виконана спеціальна команда завершення роботи (англ. Halt)
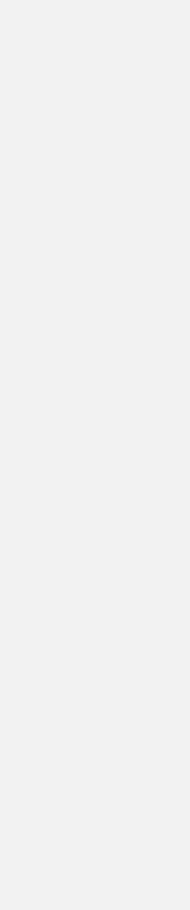
Описаний алгоритм є надзвичайно спрощеним. Адже програми рідко бувають лінійними – зазвичай в них зустрічаються умовні чи безумовні переходи що забезпечує практично неперервну роботу системи. З врахуванням цього алгоритм роботи пристрою керування дещо ускладниться (рис. 2.4).
Примітка [T6]: Номери блоків
Рис. 2.4. Цикл виконання команд програми

Під час виконання команд переходу природній порядок виконання команд порушується. У цьому випадку виконання етапів з другого по четвертий блокується, а виконання команди переходу полягає в зміні значення лічильника команд на певне значення яке визначається кодом та параметрами поточної команди.
Окрім передбаченої в програмі команди переходу, може виникнути виключна ситуація, яку необхідно певним чином опрацювати. Адже ЕОМ необхідно ще реагувати на багато інших подій, наприклад апаратні переривання. Усе це значно ускладнює злагоджену роботу пристрою керування та АЛП і впливає на складність будови ЕОМ а зокрема його основної складової – центрального процесора.
1.1.4Центральний процесор
Зазвичай з метою пришвидшення роботи ЕОМ логіку опрацювання даних (арифметико-логічний пристрій) і логіку керування (пристрій керування) а також регістрову пам’ять компонують в одну схему, яка називається центральним процесором (ЦП) чи мікропроцесором (МП).
В англійській мові слово процесор (англ. processor) загалом означає функціональний блок пристрою або системи (не обов'язково в електроніці), який виконує певний процес. В українській мові слова процесор та мікропроцесор закріпилися виключно для позначення електронної мікросхеми, що обробляє дані методом виконання команд з певного набору.
На сьогодні центральний процесор – це мозок комп’ютера. Саме він виконує необхідне перетворення інформації, керує рештою елементів ЕОМ та забезпечує обмін інформацією з навколишнім середовищем.
Як зазначалося в п.  1.1.1
1.1.1  мікропроцесори з’явилися завдяки успіхам напівпровідникової техніки. Саме винайдення у 1958 році інтегральних схем дозволило виготовляти на напівпровідниковому кристалі (чи плівці) надзвичайно складні електронні схеми й упаковувати їх в нерозбірний корпус.
мікропроцесори з’явилися завдяки успіхам напівпровідникової техніки. Саме винайдення у 1958 році інтегральних схем дозволило виготовляти на напівпровідниковому кристалі (чи плівці) надзвичайно складні електронні схеми й упаковувати їх в нерозбірний корпус.
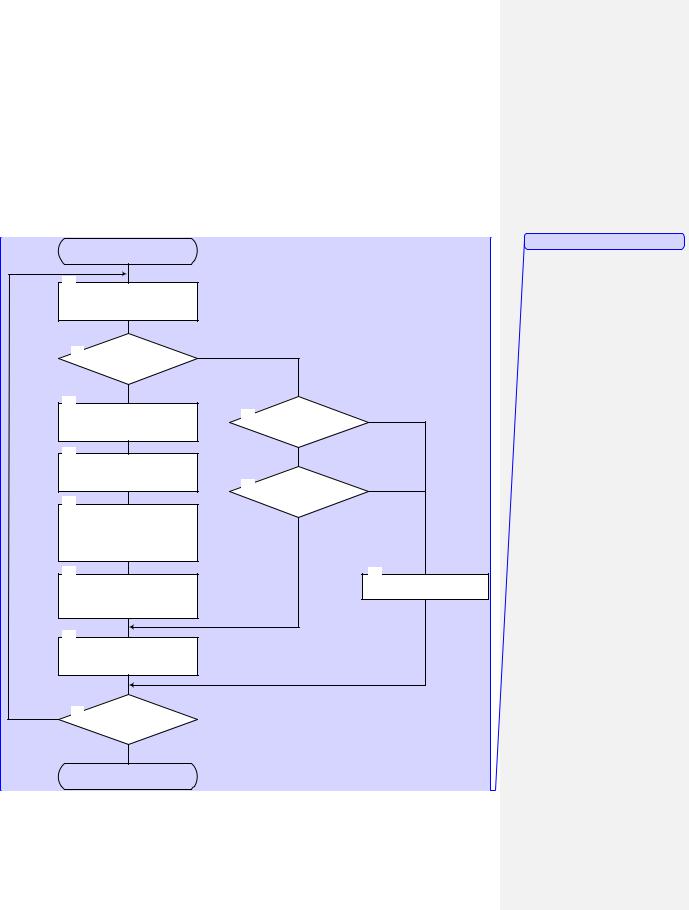
Всі сучасні процесори поміщаються на одній мікросхемі. На рис. 2.5 наведено блок-схему одного з перших мікропроцесорів – Intel 4004.
Примітка [T7]: Вставити посилання
Рис. 2.5. Блок-схема мікропроцесора Intel 4004
Як видно з рис. 2.5 в одну мікросхему інтегровано елементи різного функціонального призначення: арифметико-логічний пристрій, декодер команд, пристрій пам’яті тощо (як показано на рис.  1.3
1.3  – трансформована схема нейманівського комп’ютера). Окремий клас мікропроцесорів, який називають мікроконтролерами, додатково містить ще й багато різноманітних пристроїв введення/виведення та перетворення інформації.
– трансформована схема нейманівського комп’ютера). Окремий клас мікропроцесорів, який називають мікроконтролерами, додатково містить ще й багато різноманітних пристроїв введення/виведення та перетворення інформації.
Зв’язки між окремими елементами процесора (стрілки на рис. 2.1,б) виконуються за допомогою шин (рис. 2.5), які фактично є набором паралельно пов’язаних провідників, по яких передаються електричні сигнали. Відповідно за функціональним призначенням, шини поділяються на три типи: адресні, інформаційні (даних) і керування.
Як видно з назви адресна шина (ША) призначена для передавання адреси комірки пам’яті чи порту введення/виведення, а самі дані передаються шиною даних (ШД). Шина керування (ШК) призначена для обміну сигналами керування між окремими блоками.
Деякі з шин можуть бути спільними (їх називають мультиплексними), наприклад одна шина може передавати дані в різних напрямах чи передавати дані і адреси в різні періоди часу.
Примітка [T8]: посилання