

Вирівнювання та оцінка точності планової та висотної основи у програмі Credo Dat
Результати вимірів опрацьовували у програмі Credo Dat.
Система CREDO виробництва білоруської компанії "Кредо-Диалог" - один з найстаріших продуктів для обробки матеріалів геодезичних вищукувань та автоматизованого проектування, що використовуються в країнах колишнього СРСР. Ядром системи є програмне забезпечення CREDO DAT, призначене для обробки матеріалів польвих вишукувань та створення цифрових планів та карт.
Вихідними даними для програми CREDO DAT є растрові файли картографічних матеріалів, файли даних електронних тахеометрів (виміри й/або координати), GNSS-систем (координати й/або вектора) рукописні журнали вимірів кутів, ліній і перевищень, координати й висоти вихідних точок, робочі схеми мереж і розрахунків.
Основні функції CREDO DAT:
імпорт даних електронних тахеометрів у форматах: Sokkia (SDR2x, 3x), Nikon (RDF), Geodimeter (ARE, JOB), Leica (GRE, GSI, IDEX), Topcon (GTS6, GTS7), Trimble (М5), УОМЗ (3ТА5, 4ТА5), PENTAX (DC1, AUX, CSV), FOIF(RTS600, 680), KOLIDA (KTS440,550);
імпорт результатів постобробки ГНСС вимірів з файлів форматів: SNAP-файли (PINACLE), дані по станціях і базових лініях *.txt, *.csv (LGO), *.asc (TGO, TBC), *.tvf (Topcon Tools), звіти за рішенням базових ліній (Spectrum Survey);
імпорт прямокутних координат і вимірів з текстових файлів у довільних форматах, що налаштовуються користувачем;
завантаження растрових підложок, підготовлених у програмах ТРАНСФОРМ, MapInfo, ArcView/ArcInfo, Photomod, растрових файлів без прив'язки у форматах BMP, TIFF, JPEG;
настроювання та використання декількох класифікаторів, обробка кодових рядків розширеної системи кодування для польової реєстрації геометричної й атрибутивної інформації про топографічні об'єкти;
створення й використання власних систем (наборів кодів) польового кодування;
введення й табличне редагування даних, включаючи роботу з буфером обміну для станцій, ходів, пунктів, векторів ГНСС й окремих вимірів, відключення/відновлення пунктів і вимірів, робота з блоками даних, використання інтерактивних графічних операцій;
попередня обробка вимірів, облік різних виправлень - атмосферних, вплив кривизни Землі та рефракції, перехід на поверхню відносності. Приведення напрямків і ліній на еліпсоїд, площину в проекції Меркатора в системах координат СК42, СК63, СК95, МСК NNN, UTM та їм подібних або користувальницьких зі значеннями довготи осьового меридіана, що налаштовується, зсуву по X, Y і масштабом по осьовому меридіану;облік аномалій висот геоїда (модель EGM2008) у супутникових висотних вимірах;
виявлення, локалізація й нейтралізація грубих помилок у вихідних даних, лінійних кутових вимірах і нівелюванні автоматично (Lp-метрика), у діалоговому режимі (трасування);
спільне або роздільне вирівнювання планових супутникових вимірів (лінійно-кутових) і висотних (систем і ходів геометричного, тригонометричного нівелювання), геодезичних мереж різних форм, класів і методів (комбінації методів) створення, що виконується параметричним способом по методу найменших квадратів. Забезпечена можливість виконувати спільне вирівнювання вимірів різної точності й різних методик з розгорнутою оцінкою точності, що включає еліпси помилок;
поетапне або спільне вирівнювання багаторангових мереж;
перетворення координат, перерахування координат із прямокутних у геодезичні;
розрахунок зворотних геодезичних задач у різних видах з видачею відомостей;
обробка тахеометричного знімання з формуванням точкових, лінійних і площинних топографічних об'єктів і їхніх атрибутів за даними польового кодування;
інтерактивне формування точкових, лінійних і площинних топографічних об'єктів і їхніх атрибутів за даними польових абрисів;
проектування опорних геодезичних мереж (у тому числі з урахуванням помилок вихідних пунктів), вибір оптимальної схеми мережі, необхідних і достатніх вимірів, підбор точності вимірів;
створення відомостей і каталогів, видача їх у прийнятій формі.
настроювання вихідних документів відповідно до національних стандартів або стандартів підприємства, настроювання на будь-які мови, включаючи мови типу іврит або арабська з використанням редактора шаблонів;
створення креслень і планшетів (1:500-1:5000), схем планово-висотного обґрунтування в прийнятих або власноруч створених умовних позначеннях, повне оформлення в креслярській моделі та друк графічних документів;
експорт результатів у розповсюджені формати: DXF (AutoCAD), MIF/MID (MapInfo), у формати CREDO (CDX), у текстові формати, що настроюються користувачем;
експорт даних через послідовний порт безпосередньо в електронні тахеометри;
Результатом роботи програми є: креслення й планшети планів масштабу 1:500 - 1:5000 із зарамковим оформленням, векторні плани у форматах CREDO (CDX), DXF, MIF/MID (MapInfo), Shape-file (ArcView), текстові файли у форматах, що настроюються користувачем, каталоги й відомості вимірів, координат і оцінок.
Основними сферами застосування CREDO DAT є:
лінійні та площадні інженерні вишукування при проектуванні об'єктів промислового, цивільного та транспортного будівництва;
геодезичне забезпечення будівництва;
маркшейдерське забезпечення робіт при видобутку й транспортуванні нафти та газу;
підготовка інформації для кадастрових систем (наземні методи збору інформації);
геодезичне забезпечення геофізичних методів розвідки;
маркшейдерське забезпечення видобутку корисних копалин відкритим способом;
створення й реконструкція міських, межових, державних опорних мереж[5].
В даному програмному забезпеченні я виконувала вирівнювання та оцінку точності планової та висотної основи. На місцевості був прокладений полігонометричний 2-го розряду та хід тригонометричного нівелювання. За даними вимірів я виконала їх опрацювання.
Хід роботи:
Для початку створила новий проект в програмному забезпеченні Credo Dat (Рис.2.5).

Рис.2.5 - Створення проекту
У вкладці «Пункти ПВО» вказую координати вихідних пунктів та їх висоти (Рис.2.6).
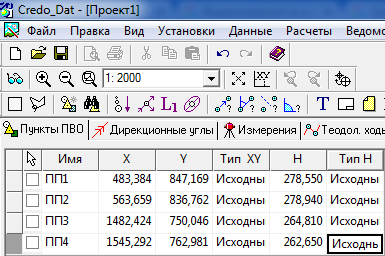
Рис.2.6 - Вихідні пункти
У вкладці «Дирекційні кути» ввожу дирекцій ний кут лінії ПП1-ПП2 (Рис.2.7).

Рис.2.7 - Дирекційний кут
Перехожу у вкладку «Теодолітні ходи» та ввожу результати вимірів (назва станції, горизонтальний кут,відстань та вказую клас полігонометрії) (Рис.2.8).

Рис.2.8 - Введення результатів вимірів
Увкладці «Нівелірні ходи» ввожу дані нівелювання (Рис.2.9).

Рис.2.9 - Дані нівелювання
Після введення всіх необхідних даних, виконую попереднє опрацювання. Для цього захожу у вкладку «Розрахунки»-«Розрахунок» (Рис. 2.10).

Рис.2.10 - Попереднє опрацювання результатів вимірів
7. Після цього я виконала аналіз мережі – «Розрахунки»-«Аналіз»-«L1-аналіз» (Рис.2.11).

Рис.2.11 - L1-аналіз
Після виконаних операцій необхідно провести вирівнювання. Для цього захожу у вкладку «Розрахунки»-«Вирівнювання»-«Розрахунок» (Рис.2.12).
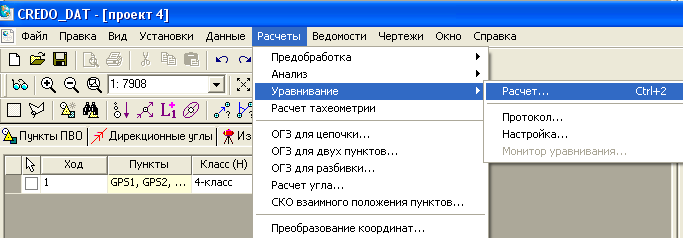
Рис.2.12 - Вирівнювання
В правій частині робочого вікна можна побачити побудований полігонометричний хід за даними вимірів, введених в попередніх пунктах (Рис.2.13).

Рис.2.13 - Хід полігонометрії
Кінцевим результатом моїх робіт є відомості. Для виведення відомостей на екран я захожу у вкладку «Відомості» і вибираю необхідні мені відомості (Рис.2.14).

Рис.2.14 - Відомості
Результати вирівнювання і оцінки точності планової і висотної основи наведено у таблицях 2.2.- 2.10. За результатами вирівнювання складено каталог координат і висот пунктів геодезичної основи (табл.2.11). Технічні характеристики мережі наведено в таблицях 2.12, 2.13.
Таблиця 2.2 – Відомість теодолітного ходу
|
Пункт |
Виміряний кут |
Дирекційний кут |
Виміряна відстань, м |
Вирівняна відстань, м |
X, м |
Y, м |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
ПП1 |
|
|
|
|
|
|
|
|
|
352°36'46,25" |
|
|
|
|
|
ПП2 |
179°50'32,00" |
|
|
|
563,659 |
836,762 |
|
|
|
352°27'18,77" |
121,778 |
121,778 |
|
|
|
1 |
167°58'44,00" |
|
|
|
684,383 |
820,772 |
|
|
|
340°26'02,96" |
129,057 |
129,055 |
|
|
|
2 |
168°21'19,00" |
|
|
|
805,986 |
777,553 |
|
|
|
328°47'21,78" |
123,084 |
123,080 |
|
|
|
3 |
199°26'21,00" |
|
|
|
911,253 |
713,774 |
|
|
|
348°13'42,28" |
152,982 |
152,981 |
|
|
|
4 |
177°11'20,00" |
|
|
|
1061,017 |
682,565 |
|
|
|
345°25'01,35" |
137,020 |
137,019 |
|
|
|
5 |
217°18'40,00" |
|
|
|
1193,622 |
648,066 |
|
|
|
22°43'40,03" |
137,025 |
137,030 |
|
|
|
6 |
174°04'25,00" |
|
|
|
1320,011 |
701,008 |
|
|
|
16°48'03,38" |
169,650 |
169,654 |
|
|
|
ПП3 |
174°49'33,00" |
|
|
|
1482,424 |
750,046 |
|
|
|
11°37'34,29" |
|
|
|
|
|
ПП4 |
|
|
|
|
|
|
Таблиця 2.3 – Відомість поправок у кути і відстані
|
Станція |
Ціль |
Редуковане значення |
Поправка |
Вирівняне значення |
|
Напрямок | ||||
|
1 |
2 |
167°58'44,00" |
0°00'00,09" |
167°58'44,09" |
|
|
ПП2 |
0°00'00,00" |
-0°00'00,09" |
359°59'59,91" |
|
2 |
3 |
168°21'19,00" |
-0°00'00,09" |
168°21'18,91" |
|
|
1 |
0°00'00,00" |
0°00'00,09" |
0°00'00,09" |
|
3 |
4 |
199°26'21,00" |
-0°00'00,25" |
199°26'20,75" |
|
|
2 |
0°00'00,00" |
0°00'00,25" |
0°00'00,25" |
|
4 |
5 |
177°11'20,00" |
-0°00'00,47" |
177°11'19,53" |
|
|
3 |
0°00'00,00" |
0°00'00,47" |
0°00'00,47" |
|
5 |
6 |
217°18'40,00" |
-0°00'00,66" |
217°18'39,34" |
|
|
4 |
0°00'00,00" |
0°00'00,66" |
0°00'00,66" |
|
6 |
ПП3 |
174°04'25,00" |
-0°00'00,83" |
174°04'24,17" |
|
|
5 |
0°00'00,00" |
0°00'00,83" |
0°00'00,83" |
|
ПП2 |
1 |
179°50'32,00" |
0°00'00,26" |
179°50'32,26" |
|
|
ПП1 |
0°00'00,00" |
-0°00'00,26" |
359°59'59,74" |
|
ПП3 |
ПП4 |
174°49'33,00" |
-0°00'01,04" |
174°49'31,96" |
|
|
6 |
0°00'00,00" |
0°00'01,04" |
0°00'01,04" |
|
Відстань, м | ||||
|
1 |
2 |
129,057 |
-0,002 |
129,055 |
|
2 |
3 |
123,084 |
-0,004 |
123,080 |
|
3 |
4 |
152,982 |
-0,001 |
152,981 |
|
4 |
5 |
137,020 |
-0,001 |
137,019 |
|
5 |
6 |
137,025 |
0,005 |
137,030 |
|
6 |
ПП3 |
169,650 |
0,004 |
169,654 |
|
ПП2 |
1 |
121,778 |
0,000 |
121,778 |
|
ПП3 |
ПП4 |
64,180 |
0,005 |
64,185 |
Таблиця 2.4 – Характеристики теодолітного ходу
|
Хід |
Клас |
Точки ходу |
Довжина, м |
N |
Nb |
|
|
Нев’язки перед вирівнюванням, м |
Нев’язки по вирівняних дирекційних кутах | |||||||
|
|
|
|
|
|
|
|
|
|
|
|
Fs/[S] |
|
|
|
Fs/[S] | |
|
1 |
2-розряд |
ПП2, 1,..., ПП3 |
970,596 |
8 |
8 |
-0°00'05,96" |
0°00'28,29" |
0,009 |
0,001 |
0,009 |
1:107230 |
-0,002 |
-0,006 |
0,006 |
1:150046 | |
 факт.
факт. доп.
доп.





|
Хід |
Пункт |
Довжина, м |
h вим, м |
Поправка, м |
h вирів, м |
H, м | ||||
|
1 |
ПП2 |
|
|
|
|
278,940 | ||||
|
|
|
0,122 |
-0,360 |
-0,001 |
-0,361 |
| ||||
|
|
1 |
|
|
|
|
278,579 | ||||
|
|
|
0,129 |
-2,420 |
-0,001 |
-2,421 |
| ||||
|
|
2 |
|
|
|
|
276,157 | ||||
|
|
|
0,123 |
-2,220 |
-0,001 |
-2,221 |
| ||||
|
|
3 |
|
|
|
|
273,936 | ||||
|
|
|
0,153 |
-3,200 |
-0,002 |
-3,202 |
| ||||
|
|
4 |
|
|
|
|
270,735 | ||||
|
|
|
0,137 |
-2,540 |
-0,001 |
-2,541 |
| ||||
|
|
5 |
|
|
|
|
268,193 | ||||
|
|
|
0,137 |
-2,180 |
-0,001 |
-2,181 |
| ||||
|
|
6 |
|
|
|
|
266,012 | ||||
|
|
|
0,170 |
-1,200 |
-0,002 |
-1,202 |
| ||||
|
|
ПП3 |
|
|
|
|
264,810 | ||||
|
Разом: |
0,971 |
-14,120 |
-0,010 |
-14,130 |
| |||||
|
Вирівняне перевищення: |
-14,130 м | |||||||||
|
Нев’язка: |
0,010 м | |||||||||
|
Поправка на 1 км: |
-0,010 м | |||||||||
|
| ||||||||||
Таблиця 2.6 – Характеристики нівелірного ходу
|
Хід |
Клас |
Пункти |
Довжина, м |
N |
м |
м |
|
1 |
Тригонометрич-не |
ПП2, 1, ..., ПП3 |
0,971 |
8 |
0,010 |
0,020 |
 факт.,
факт., доп.,
доп.,
Таблиця 2.7 – Відомість оцінки точності планової основи
|
Клас |
Лінійно-кутова мережа |
СКП кутів в ходах, ´´ | |||||||
|
|
СКП напрямків, ´´ |
СКП ліній, м |
| ||||||
|
|
Апріорна |
Фактична |
Апріорна |
Фактична |
Апріорна |
Фактична | |||
|
2-розряд |
3,5 |
1,4 |
0,020 |
0,008 |
5 |
1 | |||
Таблиця 2.8 – Відомість оцінки точності висотної основи
|
Тригонометричне нівелювання, М | |
|
Апріорна |
Фактична |
|
0,012 |
0,010 |
Таблиця 2.9 – Поправки за результатами вирівнювання
|
Клас |
У виміряні напрямки |
У виміряні відстані, м | |||||||||
|
|
Min |
Сторона |
Max |
Сторона |
Середня |
Min |
Сторона |
Max |
Сторона |
Середня | |
|
2-розряд |
0°00'00,09" |
2 - 1 |
0°00'01,04" |
ПП3 – 6 |
0°00'00,46" |
0,000 |
ПП2 - 1 |
0,005 |
5 - 6 |
0,003 | |
Таблиця 2.10 – Відомість оцінки точності положення пунктів за результатами вирівнювання
|
M min, м |
Пункт |
M max, м |
Пункт |
M сер., м | ||||||
|
0,008 |
6 |
0,011 |
3 |
0,010 | ||||||
|
Пункт |
M, м |
Mx, м |
My, м |
а, м |
b, м |
α |
Mh, м | |||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 | |||
|
1 |
0,008 |
0,008 |
0,002 |
0,008 |
0,001 |
172°25'04,31" |
0,003 | |||
|
2 |
0,010 |
0,010 |
0,003 |
0,010 |
0,002 |
167°37'24,74" |
0,004 | |||
|
3 |
0,011 |
0,010 |
0,004 |
0,011 |
0,003 |
167°21'26,64" |
0,005 | |||
|
4 |
0,011 |
0,010 |
0,004 |
0,010 |
0,004 |
175°46'10,64" |
0,005 | |||
|
5 |
0,009 |
0,009 |
0,003 |
0,009 |
0,002 |
11°37'28,82" |
0,005 | |||
|
6 |
0,008 |
0,008 |
0,002 |
0,008 |
0,001 |
14°52'52,74" |
0,004 | |||
Таблиця 2.11 – Каталог координат і висот пунктів геодезичної основи
|
N |
Назва пункту |
X, м |
Y, м |
H, м |
|
Планово-висотна основа | ||||
|
1 |
1 |
684,383 |
820,772 |
278,579 |
|
2 |
2 |
805,986 |
777,553 |
276,157 |
|
3 |
3 |
911,253 |
713,774 |
273,936 |
|
4 |
4 |
1061,017 |
682,565 |
270,735 |
|
5 |
5 |
1193,622 |
648,066 |
268,193 |
|
6 |
6 |
1320,011 |
701,008 |
266,012 |
|
7 |
ПП1 |
483,384 |
847,169 |
278,550 |
|
8 |
ПП2 |
563,659 |
836,762 |
278,940 |
|
9 |
ПП3 |
1482,424 |
750,046 |
264,810 |
|
10 |
ПП4 |
1545,292 |
762,981 |
262,650 |
Таблиця 2.12 – Технічні характеристики теодолітного ходу
|
Клас |
Загальна довжина ходів, м |
Ходів |
Довжина ходу, м |
Довжини сторін, м |
Кутова нев’язка |
Лінійна нев’язка, м | |||||||||||||
|
|
|
|
Min |
Хід |
Max |
Хід |
Середня |
Min |
Max |
Середня |
|
|
Хід |
|
Fs/[S] |
Хід | |||
|
2-розряд |
970,596 |
1 |
970,596 |
1 |
970,596 |
1 |
970,596 |
121,778 |
169,650 |
138,657 |
5,96" |
28,29" |
1 |
0,006 |
1:150046 |
1 | |||
 max
max доп.
доп. max
max
Таблиця 2.13 – Технічні характеристики нівелірного ходу
|
Клас
|
Довжина, км |
Хо- дів |
Довжина ходу, км |
Висотна нев’язка, м | |||||||
|
Min |
Хід |
Max |
Хід |
Середня
|
|
|
Хід | ||||
|
Тригоном. нівелювання |
0,971
|
1 |
0,971 |
1 |
0,971 |
1 |
0,971 |
0,010 |
0,020 |
1 | |
 макс
макс доп.
доп.Аналізуючи таблиці 2.12 і 2.13, можна зробити висновок, що дані ходи задовільняють вимоги зазначені в інструкції з топографічного знімання.
Загальна довжина ходу – 970,596 м, найменша сторона - 121,778 м, найбільша – 169,650 м. Як бачимо, лінійна та кутова нев’язки в допуску.
Отримана
відносна помилка ходу становить 1:150 000
і не перевищує гранично допустимої 1:5
000. Висотна нев’язка
теж знаходиться в допуску, так як при
 доп
=0,020м
доп
=0,020м
 макс=0,010м.
Отже,
створена геодезична основа задовольняє
вимоги до полігонометрії 2-го розряду
та тригонометричного нівелювання.
макс=0,010м.
Отже,
створена геодезична основа задовольняє
вимоги до полігонометрії 2-го розряду
та тригонометричного нівелювання.