

Динамічний перерозподіл нормальних навантажень на осі автомобіля при гальмуванні
При гальмуванні автомобіля нормальні реакції дороги змінюються порівняно з рівномірним рухом. Для ілюстрації перерозподілу розглянемо гальмування автомобіля при русі горизонтальною дорогою (рис. 27).
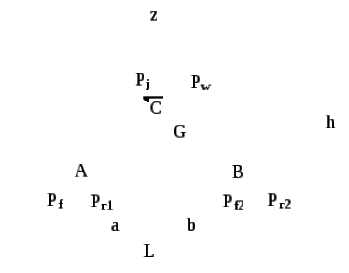
Рис. 27. Схема до визначення динамічного перерозподілу навантажень при гальмуванні
Рівняння рівноваги моментів відносно контактів передніх коліс (точка А) і задніх коліс (точка В) з дорогою:
![]()
![]()
![]()
![]()
Тут для простоти прийнято, що рівнодійна сил опору повітря РWприкладена на висоті центру маси від поверхні дороги. З наведених рівнянь визначаються нормальні реакції дороги.
![]()
![]()
При високих швидкостях сила опору
повітря суттєво впливає на перерозподіл
нормальних реакцій. Із зменшенням
швидкості вважається, що при швидкостях
до 20 м/с силу опору повітря під час
гальмування можна не враховувати. Це
пояснюється тим, що при невеликих
швидкостях сили Pw
i![]() є співмірними. З врахуванням сказаного
значення нормальних реакцій можна
записати
є співмірними. З врахуванням сказаного
значення нормальних реакцій можна
записати
![]()
![]()
Вище було сказано, що максимальне
значення дотичної реакції опорної
поверхні на колесо
![]()
Тоді сума дотичних реакцій на всі колеса
![]()
Підставивши це значення в рівняння руху при гальмуванні, і пам’ятаючи, що на горизонтальній дорозі сила опору підйому рівна нулю, одержуємо
![]() або
або![]() ,
,
звідки
![]()
Вирази для визначення нормальних реакцій при максимальній інтенсивності гальмування, коли повністю використовується сила зчеплення, набувають вигляду
![]()
![]()
Розподіл сумарної гальмівної сили
Гальмівна сила Ргє основною складовою дотичної реакціїRx, перевищуючи інші складові в десятки разів. Тому можна прийняти, особливо при нагальному гальмуванні,
![]()
і вважати, що максимальне значення сумарної гальмівної сили автомобіля
![]()
Для досягнення такої гальмівної сили необхідно, щоб максимальні гальмівні сили на передніх і задніх колесах дорівнювали силам зчеплення:
![]()
![]()
Одночасне досягнення гальмівними силами
значень
![]() і
і![]() забезпечується оптимальним розподілом
сумарної гальмівної сили між передніми
і задніми колесами.
забезпечується оптимальним розподілом
сумарної гальмівної сили між передніми
і задніми колесами.
Коефіцієнт зчеплення досягає максимуму при певному проковзуванніsопт. Якщо у всіх коліс одночасно досягається оптимальне проковзування, то забезпечується максимальне усталене сповільненняjустта мінімальний гальмівний шляхsг. Якщо в якогось колесаsоптнастає раніше, ніж в інших, то в останніх гальмівна сила ще не досягне максимуму, і сумарна гальмівна сила автомобіля не буде максимальною. Дальше натискання на гальмову педаль задля досягнення максимуму гальмівної сили на недогальмованих колесах зумовить блокування, тобто стовідсоткове проковзування колеса, в якого гальмівна сила найшвидше стала максимальною. В результаті у цього колеса гальмівна сила зменшується, зменшується і сумарна гальмівна сила автомобіля. Отже, блокування хоча б одного колеса зменшує сумарну гальмівну силу автомобіля.
Варто зазначити, що недоцільно доводити колеса до блокування також з огляду на стійкість і керованість автомобіля, тому що при стовідсотковому проковзуванні колесо не може сприймати бокові сили. При заблокованих колесах навіть невеликі поперечні сили можуть викликати бокове ковзання коліс моста.
Коли першими блокуються колеса заднього моста, автомобіль втрачає стійкість (рис. 28).

Рис. 28. Гальмування при блокуванні задніх коліс
Заблоковані задні колеса нездатні
сприймати поперечну силу. Тому поява
бокової сили, викликана, наприклад,
вітром, нерівністю дороги, рухом по
кривій зумовлює появу поперечної реакції
лише на передніх колесах. Бокова сила
Руразом з поперечною реакцією
передніх колісRy1
створюють поворотний момент, що
змушує колеса заднього моста ковзати
по опорній поверхні в поперечному
напрямі. При відхиленні поздовжньої
осі автомобіля від попереднього напряму
руху сила інерціїPj
створює додатковий поворотний момент![]() ,
який має той самий напрям, що й момент,
створений поперечною силою. Величина
додаткового поворотного моменту зростає
при збільшенні відхилення поздовжньої
осі автомобіля, зумовлюючи занос заднього
моста.
,
який має той самий напрям, що й момент,
створений поперечною силою. Величина
додаткового поворотного моменту зростає
при збільшенні відхилення поздовжньої
осі автомобіля, зумовлюючи занос заднього
моста.
При блокуванні передніх коліс стійкість автомобіля не втрачається (рис. 29).

Рис. 29. Гальмування при блокуванні передніх коліс
Оскільки передні колеса заблоковані,
вони не сприймають поперечних сил, тому
бокова сила викликає появу поперечної
реакції лише на задніх колесах. Подібно
до попереднього випадку бокова сила Руразом з поперечною реакцією задніх
колісRy2створюють поворотний момент, який змушує
колеса переднього моста ковзати в
поперечному напрямі. При відхиленні
поздовжньої осі автомобіля від
попереднього напряму руху сила інерціїPjстворює додатковий поворотний момент![]() ,
який протидіє поворотному моментові,
створеному боковою силою. Внаслідок
цього автомобіль прагне повернутися
до попереднього напряму руху, тому
стійкість не втрачається. Однак, оскільки
виникає протидія зміні напряму руху,
автомобілем стає важко кермувати, тобто
погіршується керованість. Задньоприводний
автомобіль, в якого при повороті керованих
коліс поворотний момент створюється
поперечними реакціями коліс переднього
моста, може стати цілком некерованим.
,
який протидіє поворотному моментові,
створеному боковою силою. Внаслідок
цього автомобіль прагне повернутися
до попереднього напряму руху, тому
стійкість не втрачається. Однак, оскільки
виникає протидія зміні напряму руху,
автомобілем стає важко кермувати, тобто
погіршується керованість. Задньоприводний
автомобіль, в якого при повороті керованих
коліс поворотний момент створюється
поперечними реакціями коліс переднього
моста, може стати цілком некерованим.
Можна зробити такий висновок: якщо у всіх коліс проковзування одночасно досягає оптимального значення, це забезпечує як максимальну ефективність гальмування, тобто найбільше усталене сповільнення, так і збереження стійкості та керованості при гальмуванні.
Оптимальному розподілові гальмівних сил відповідає рівність
![]()
Оскільки коефіцієнти зчеплення передніх і задніх коліс з дорогою приблизно однакові, то умовою оптимального розподілу є рівність
![]()
Підставивши значення нормальних реакцій при гальмуванні, одержимо

Величини, що входять в праву частину виразу, яким відображається оптимальний розподіл гальмівних сил, змінюються. Координати центру маси a,b,hзмінюються залежно від ступеню завантаження автомобіля, а коефіцієнт зчеплення різний на різних дорогах. Тому оптимальне співвідношення гальмівних сил також повинне змінюватися.
Розподіл сумарної гальмівної сили між колесами переднього і заднього моста характеризується коефіцієнтом розподілу гальмівної сили
![]()
Очевидно, при оптимальному розподілі
![]()
Залежність оптимального коефіцієнта розподілу від коефіцієнта зчеплення відображається графіком (рис. 30).

Рис. 30. Залежність коефіцієнта розподілу від коефіцієнта зчеплення та ступеню завантаження
Лінія зміни о() завантаженого автомобіля лежить нижче, тому що в нього в більшій мірі зменшується координатаb, ніж зростає координатаh.
Оптимальний розподіл сумарної гальмівної сили можливий, якщо коефіцієнт розподілу змінюється залежно від ступеню завантаження автомобіля та коефіцієнта зчеплення. Таке можливе тільки при використанні регулятора гальмівних сил. Якщо регулятора нема, то для кожного вагового стану значення коефіцієнта розподілу залишається сталим при різних коефіцієнтах зчеплення. В таких автомобілів оптимальний розподіл гальмівної сили, а отже і повне використання зчіпної ваги, можливе лише при певному коефіцієнті зчеплення.
Для забезпечення стійкості автомобіля при гальмуванні бажано, щоб задні колеса не блокувалися першими. В зв’язку з цим згідно з правилами, затвердженими ЄЕК ООН, рекомендується розподіляти гальмівні сили так, щоб при всіх вагових станах гальмівні сили були більші на передніх колесах при = 0,15…0,8 у легкових автомобілів і при= 0,15…0,4 в інших автомобілів. При виконанні цієї рекомендації в легкових автомобілів завжди першими блокуватимуться передні колеса; в інших автомобілів забезпечується випереджуюче блокування передніх коліс на слизьких дорогах.
Якщо нанести стале значення сна діаграму розподілу гальмівної сили, одержимо графік, зображений на рис. 31.

Рис. 31. Залежність оптимального і сталого коефіцієнтів розподілу від коефіцієнта зчеплення
При коефіцієнті зчеплення орозподіл гальмівних сил у автомобіля без регулятора є оптимальним. При інших значенняхреальний коефіцієнт розподілу або перевищує оптимальний, або є меншим.
Якщо о, тоо.
Це означає, що на передніх колесах
гальмівна сила перевищує оптимальне
значення, що видно із визначення![]() ,
тому їх блокування настане раніше, ніж
задніх.
,
тому їх блокування настане раніше, ніж
задніх.
Якщо о, тоо. В цьому випадку на задніх колесах гальмівна сила перевищує оптимальне значення, тому вони заблокуються раніше.