

Структура гсп. Электрическая ветвь.
Широкое распространение имеют такие автоматизированные системы контроля, управления и регулирования, в которых вся или наиболее важная часть информации о значениях контролируемых параметров передается человеку (оператору) определяющему и осуществляющему необходимые воздействия в соответствии с заданной программой или критериями для ведения технологического процесса. В таких системах используется для связи с человеком (оператором, диспетчером): акустические, оптические и механические сигналы.
В зависимости от рода энергии, используемой от вспомогательного источника для формирования сигнала, можно различать следующие ветви приборов (устройств) ГСП:
А. Электрическую.
Б. Пневматическую.
В. Гидравлическую.
Кроме того, существует ветвь приборов и устройств без источников вспомогательной энергии. Энергия для образования сигнала у приборов данной ветви отбирается от контролируемой среды.
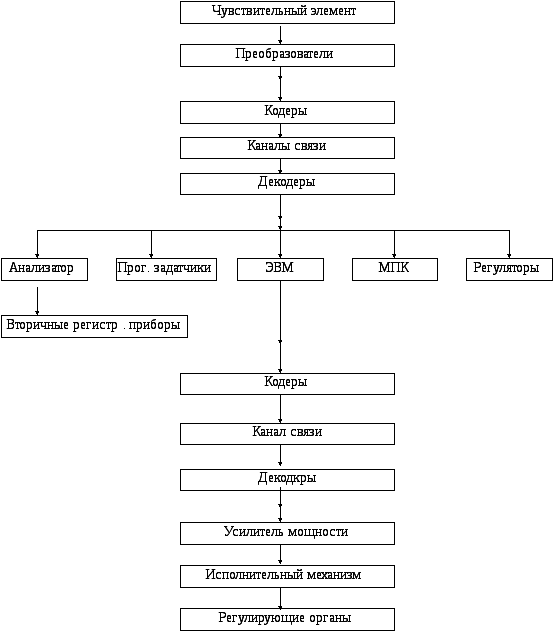
На рис. 1.1 приведено разделение общей Государственной системы приборов и устройств на указанные ветви. На рисунке приведены основные пять групп функциональных устройств, входящих в каждую из ветвей, указаны основные используемые сигналы, а также основные виды приборов, входящих в каждую из функциональных групп устройств
Часто приходится создавать комбинированные системы, использующие различные виды сигналов. Например, электрические сигналы (в устройствах для получения, передачи и обработки информации) и пневматические или гидравлические (в устройствах для использования информации) либо пневматические сигналы (в устройствах для получения, передачи и обработки информации) и гидравлические (в устройствах для использования информации). В связи с этим необходимо наличие преобразователей сигналов одного рода энергии в сигналы другого рода энергии.На рисунке указаны различные необходимые преобразователи сигналов одного рода энергии в другой.
Устройства для получения информации об изменении контролируемого параметра (датчики сигналов) могут непосредственно формировать сигнал необходимого рода энергии и требуемых пределов изменения либо после них приходится ставить специальный преобразователь.
Устройства для воздействия на процесс (исполнительные устройства) производят изменение потоков энергии или вещества с помощью различных регулирующих органов, указанных в нижней части рис. 1.1.
I
II
III
IV
V
Рис. 1.1. Структура ГСП. Электрическая ветвь
СИСТЕМОТЕХНИЧЕСКИЙ АНАЛИЗ СТРУКТУР АВТОМАТИЗИРОВАННЫХ ТЕХНОЛОГИЧЕСКИХ КОМПЛЕКСОВ (АТК)
Обоснование выбора структуры АТК производится на основе анализа результатов обследования (или моделирования – для новых технологических процессов) автоматизируемого ТОУ, после определения целей автоматизации, анализа характера и определения числа необходимых для реализации целей автоматизации , управляющих и информационных функций. Как показывает опыт, наиболее сильно влияет на выбор той или иной структуры АТК временной характер автоматизируемого технологического процесса; наличие близких или типовых решений (прототипов); вид (тип), сложность . число единиц , территориальное расположение автоматизируемого технологического оборудования; диапазон и скорость измерения управляющих и контролируемых параметров ТОУ; технические требования (надежность, живучесть, устойчивость к внешним воздействиям и др.); экономическая эффективность того или иного проектного решения; перспективность развития (совершенствование) системы управления по мере роста профессиональной подготовки обслуживающего персонала; знание и опыт разработчиков системы и др.
Перечисленные выше факторы позволяют с той или иной степенью приближения (в зависимости от стадии проектирования) определить перечень подлежащих реализации в данном проекте АТК управляющих и информационных функций АСУ ТП и определить (рассчитать) требования к техническим средствам системы управления.
Для решения этой задачи необходимо проанализировать итоговые структурно-функциональные схемы АТК, определив их достоинства, недостатки и области применения.