

Приложение
1 Управление с обратной связью/ПИД-регулятор I-1
1.1 Что такое управление с обратной связью? I-1
1.1.1 Технология управления без обратной связи/с обратной связью I-1
1.1.2 Основная терминология управления с обратной связью I-2
1.2 Описание временной реакции управляемых систем I-9
1.3 Регуляторы с обратной связью I-9
1.3.1 Пропорциональный регулятор I-10
1.3.2 Регулятор интегранльного действия I-12
1.3.3 Регулятор дифференциального действия I-13
1.3.4 Комбинированные регуляторы I-14
1.3.5 Структуризация и параметрирование регуляторов I-17
2 Подсистемы робота: Привод I-20
2.1 Общая информация по всенаправленным роботам I-20
2.2 Разнонаправленные колеса I-22
2.3 Свобода движения системы на плоскости и в пространстве I-24
2.3.1 Степени свободы I-24
2.3.2 Система координат I-25
2.3.3 Движение тел I-26
2.4 Включение всенаправленного привода I-27
2.4.1 Включение и направление движения I-29
2.4.2 Включение трех двигателей Robotino® I-30
3 График характеристик датчиков I-32
3.1 Запись графика характеристик I-32
3.2 Линеаризация графика характеристик I-32
4 Инфракрасные датчики расстояния I-34
4.1 Инфракрасные датчики в Robotino® View I-35
5 Оптические датчики приближения I-37
5.1 Конструкция оптических датчиков приближения I-37
5.2 Запас рабочих характеристик оптических датчиков I-38
5.3 Технические характеристики I-39
5.4 Примечания по эксплуатации I-40
5.5 Подавление фона посредством диффузионного датчика I-41
5.6 Регулируемая чувствительность I-41
5.7 Поведение диффузионного датчика в случае с зеркальным объектом I-42
5.8 Примеры применения I-43
5.9 Оптические датчики приближения с оптико-волоконными кабелями I-44
5.9.1 Примечания по эксплуатации I-44
5.9.2 Примеры применения I-45
6 Индуктивный датчик I-46
6.1 Использование I-46
7 Чувствительная кромка, обнаружение столкновений I-47
7.1 Области применения I-47
7.2 Бампер в Robotino® View I-47
8 Веб-камера I-48
Управление с обратной связью/пид-регулятор
Что такое управление с обратной связью?
В механизмах или системах часто необходимо установить предварительно заданные значения таких переменных, как давление, температура или расход. Боле того, такие установленные значения не должны изменяться даже в случае возникновения каких-либо возмущений. Выполнение данных функций обеспечивается управлением с обратной связью.
Управление с обратной связью позволяет устранять любые вопросы, связанные с данной задачей.
Чтобы переменной можно было управлять, и чтобы она была доступна регулятору с обратной связью в виде электрического сигнала, сначала ее необходимо измерить и соответствующим образом преобразовать.
Эту переменную необходимо сравнить с заданным значением или шаблоном значений в регуляторе. После чего по результатам этого сравнения следует определить требуемую реакцию в системе.
И наконец, в системе следует найти соответствующую точку, посредством которой можно регулировать данную переменную (например, привод нагревателя). Чтобы иметь такую возможность, важно обладать данными о поведении системы.
Технология управления с обратной связью предполагает попытку установления общеприменимых взаимосвязей, которые повсеместно возникают при применении различных технологий. В большинстве учебников это объясняется при помощи высшей математики. Цель этой главы заключается в том, чтобы объяснить основную терминологию и привести сведения по технологии управления с обратной связью в основном без привлечения математики.
Технология управления без обратной связи/с обратной связью
Управление без обратной связи
В стандарте IEC 60050-351 дается следующее определение: Управление без обратной связи – это процесс в системе, где одна или несколько переменных в качестве входных переменных воздействуют на другие переменные (как выходные переменные) по законам, уникальным для системы.
Отличительная характеристика управления без обратной связи – это разомкнутый поток действий, т.е. выходная переменная никак не влияет на входную переменную.
Управление с обратной связью
В стандарте IEC 60050-351 дается следующее определение: Управление с обратной связью – это процесс в системе, где управляемая переменная (регулируемая переменная) постоянно контролируется и сравнивается с заданным значением (опорная переменная). В зависимости от результата такого сравнения входная переменная системы изменяется так, чтобы произошла регулировка выходной переменной до заданного значения независимо от всех отклонений. В результате такой реакции системы возникает замкнутый поток действий.
Основная терминология технологии управления с обратной связью
Опорная переменная
Опорная переменная W также обозначается как заданное значение регулируемой переменной. Она обозначает требуемое значение регулируемой переменной. Опорная переменная может оставаться неизменной с течением времени; но также может меняться с течением времени. Задача управления с обратной связью состоит в том, чтобы для регулируемой переменной поддерживать требуемое значение, или следовать графику требуемого значения. Это требуемое значение известно как опорная переменная
Регулируемая переменная
Целью управления с обратной связью является поддержание требуемого значения или графика значений для переменной. Подлежащая регулированию переменная называется регулируемой переменной x.
Данная проблема возникает в системах или на машинах на базе самых разнообразных технологий, и подлежащая регулированию переменная известна как регулируемая переменная.
Пример
Скорость двигателя постоянного тока (См. проект 2)
Для достижения оптимального поведения системы во время движения необходимо установить практически одинаковую заданную величину и фактическое значение скорости.
Примеры регулируемых переменных: • давление в воздушном резервуаре • давление в гидравлическом прессе • температура в электролитической ванне • поток охлаждающих жидкостей в теплообменнике • концентрация химического вещества в сосуде для перемешивания • скорость движения подачи на механическом станке с электрическим приводом • скорость двигателя
Регулирующая переменная
Управление с обратной связью может быть реализовано только в том случае, если имеется возможность вмешаться в работу машины или системы для изменения регулируемой переменной.
Регулируемую переменную можно изменить в любой системе посредством вмешательства. Само такое вмешательство позволяет изменить регулируемую переменную таким образом, чтобы она соответствовала заданному значению. Переменная, которая производит вмешательство, известна как регулирующая переменная y.
Примеры регулирующих переменных: • настройка дросселя выходящего воздуха на воздушном резервуаре • настройка клапана регулировки гидравлического давления • напряжение, поданное на электрический нагревательный элемент электролитической ванны • настройка регулятора расхода на линии подачи охлаждающей жидкости • настройка клапана на линии подачи химического вещества • напряжение на обмотке двигателя постоянного тока
Переменная возмущения z
Возмущения происходят в любой регулируемой системе, поэтому управление с обратной связью является необходимостью. Воздействия таких возмущений известны как переменные возмущения z.
Управляемая система является частью машины или системы, в которой необходимо изменить регулируемую переменную до заданного значения, и в которой регулирующие переменные используются для изменения переменных возмущения. Управляемая система состоит не только из регулирующей переменной в качестве входной переменной, так как переменные возмущения тоже могут выступать в качестве входных переменных.
Отклонение системы xd
Сравнение опорной и регулируемой переменной известно как отклонение системы xd. Оно рассчитывается в виде следующей разности:
xd = e = W - x
Реакция на управление
Реакция на управление отображает, как регулируемая система реагирует на изменение входной переменной. Определение реакции на управление – это цель технологии управления с обратной связью.
Регулятор с обратной связью
Задача регулятора с обратной связью заключается в том, чтобы поддерживать значение регулируемой переменной как можно ближе к значению опорной переменной. Регулятор непрерывно сравнивает значение регулируемой переменной со значением опорной переменной.
По результатам этого сравнения и по реакции на управление регулятор определяет и передает на свой выход значение регулирующей переменной.

|
process value PV |
Значение технологического параметра PV |
|
deviation d |
Отклонение d |
|
controller algorithm |
Алгоритм регулятора |
|
controller output CO (actuating variable) |
Выход регулятора CO (регулирующая переменная) |
|
set point SP (reference variable) |
Заданное значение SP (опорная переменная) |
Исполнительный элемент и привод
Исполнительный элемент изменяет регулируемую переменную. В действие исполнительный элемент обычно приводится особым приводом. Привод всегда необходим в тех случаях, когда регулятор с обратной связью не способен воздействовать на исполнительный элемент напрямую.
Измерительный элемент
Чтобы регулятор мог получить доступ к регулируемой переменной, ее необходимо измерить с помощью измерительного элемента (датчика, преобразователя) и преобразовать в физическую переменную, которая может быть обработана регулятором в качестве входных данных.
Цепь с обратной связью
В цепи с обратной связью имеются все элементы, необходимые для реализации автоматического управления с обратной связью.

|
controller output CO |
Выход регулятора CO |
|
controlled system |
Регулируемая система |
|
process value PV |
Значение технологического параметра PV |
|
controller |
Регулятор |
|
set point SP |
Заданное значение SP |
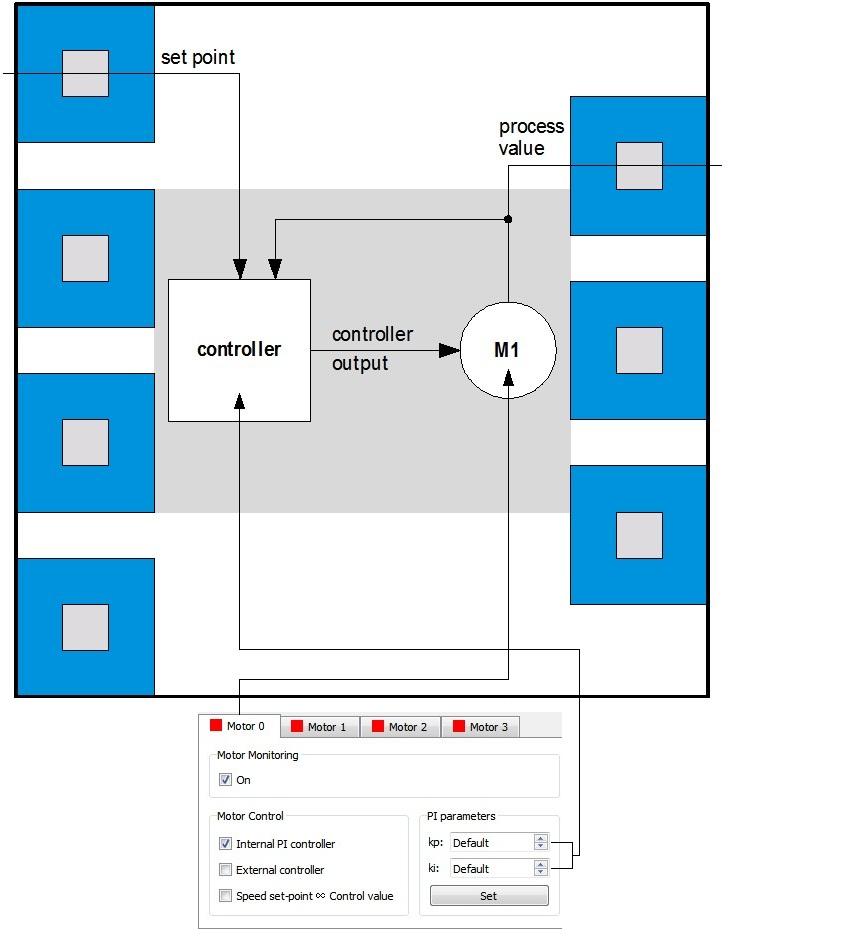
Пример -Robotino®
В функциональный блок Motor (двигатель) входит программный регулятор для управления скоростью двигателя.
![]()
|
set point |
Заданное значение |
|
process value |
Значение технологического параметра |
|
controller |
Регулятор |
|
controller output |
Выход регулятора |
|
Motor |
Двигатель |
|
Motor monitoring |
Мониторинг двигателя |
|
Motor Control |
Управление двигателем |
|
Internal PI controller |
Внутренний ПИ-регулятор |
|
External controller |
Внешний регулятор |
|
Speed set-pont * * Control value |
Заданное значение скорости * * контрольное значение |
|
PI parameters |
ПИ параметры |
|
Set |
Задать |
Поэтому опорная переменная W регулятора с обратной связью идентична заданной скорости x двигателя.
Регулируемая переменная = фактическое значение скорости двигателя Измерение производится посредством датчика двигателя. Задача регулятора с обратной связью заключается в достижении минимального отклонения системы, т.е. отклонения фактического значения от опорной переменной.
Пример
В зависимости от отклонения системы регулятор с обратной связью подает сигнал на исполнительный элемент. Если отклонение системы в основном происходит в отрицательном направлении, т.е. измеренное значение объемного расхода больше заданного значения (опорной переменной), то клапан прикрывается. Если отклонение системы в основном происходит в положительном направлении, т.е. измеренное значение меньше заданного значения (опорной переменной), то клапан приоткрывается.

|
set point 20° C |
Заданное значение 20°C |
|
controller |
Регулятор |
|
display |
Экран |
|
instrument |
Прибор |
|
electric motor |
Электродвигатель |
|
stream |
Поток |
|
control valve |
Регулирующий клапан |
|
water |
Вода |
|
heating |
Нагрев |
Как правило, оптимальное отслеживание выходной переменной невозможно:
Если вмешательство происходит слишком быстро или внезапно, то на вход системы поступает слишком высокое значение. В результате чего на выходе формируется пульсирующая реакция.
Если вмешательство происходит слишком медленно или слабо, то изменение выходной переменной будет только приблизительно соответствовать желаемой реакции.
Более того, для разных систем, т.е. разных управляемых систем, также требуются разные стратегии управления. При управлении системами с длительными задержками необходимо проявлять осторожность и прогнозировать ситуацию. Это кратко определяет проблему технологии управления с обратной связью и задачи, которые ставятся перед инженером систем управления.
|
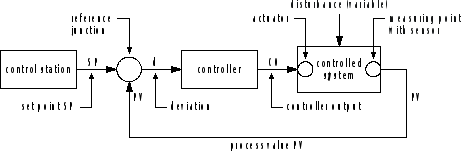
reference junction |
Опорный узел |
|
control station |
Пульт управления |
|
set point SP |
Заданное значение SP |
|
deviation |
Отклонение |
|
controller |
Регулятор |
|
controller output |
Выход регулятора |
|
controlled system |
Управляемая система |
|
actuator |
Привод |
|
disturbance (variable) |
Возмущение (переменная) |
|
measuring point with sensor |
Точка измерения с датчиком |
|
process value PV |
Значение технологического параметра PV |
Если требуется разработать управление с обратной связью для управляемой системы, необходимо предпринять следующие шаги:
Определение регулирующей переменной (это позволяет определить управляемую систему),
Определение реакции управляемой системы,
Принятие стратегии управления для управляемой системы (реакция системы «регулятор»),
Выбор соответствующих измерительных и исполнительных элементов.
Управляемые системы
Между регулирующей переменной и регулируемой переменной существуют сложные взаимосвязи. Эта взаимосвязь возникает из-за физической взаимозависимости данных двух переменных. Та часть управления, которая описывает эти физические процессы, называется управляемой системой.
Управляемая система является частью машины или системы, в которой регулируемую переменную необходимо изменить до заданного значения, и в которой регулирующие переменные используются для изменения переменных возмущения. В качестве входной переменной в управляемой системе может выступать не только регулирующая переменная, но и переменная возмущения.
Прежде чем назначить регулятор для управляемой системы, необходимо установить поведение данной системы. Инженеру систем управления интересны не технические процессы в управляемой системе, а только ее поведение.
Временная реакция системы
Особенную важность в технологии управления с обратной связью имеет временная реакция системы (также известная как динамическая реакция). Это временная характеристика выходной переменной (регулируемой переменной) на изменения во входной переменной. Особенную важность имеет реакция, когда изменяется регулирующая переменная.
Инженер систем управления должен понимать, что практически в каждой системе имеется характерная динамическая реакция.