

Введение.
В современном производстве наибольшее количество технологических процессов осуществляется с помощью электрической энергии, преобразуемой в механическую энергию посредством электромеханических устройств - электрических машин.
Требования, предъявляемые к качеству продукции, а также к производительности механизмов, реализующих ту или иную технологию, очень высоки. Они могут быть достигнуты в системах большой точности и высокой производительности. Такой системой, чаще всего, является система автоматизированного электропривода.
В ней имеет место преобразование электрической энергии в механическую, что необходимо для реализации нужной технологии.
Понятие “электропривод” тесно связано с понятием “электрическая машина”, которая является основным элементом электропривода. С этим элементом всегда связан более или менее сложный сопутствующий антураж, который тем сложнее, чем более обширные функции возлагаются на электропривод и чем более жесткие требования к нему предъявляются.
С понятием “автоматизированный электропривод” удобно познакомиться, рассматривая функциональную схему, составленную из основных, входящих в него элементов.
Энергия, поступающая из сети (может иметь место и обратное направление энергии), на пути к рабочему органу механизма претерпевает целый ряд преобразований. Так, СП преобразует электрическую энергию, потребляемую из сети, в такой вид электрической энергии, которая может потребляться электродвигателем (М).
В свою очередь, М преобразует эту электрическую энергию в механическую энергию вращающегося вала. Кинематическая цепь преобразует механическую энергию с одними параметрами (момент, частота вращения) в механическую энергию с другими параметрами.
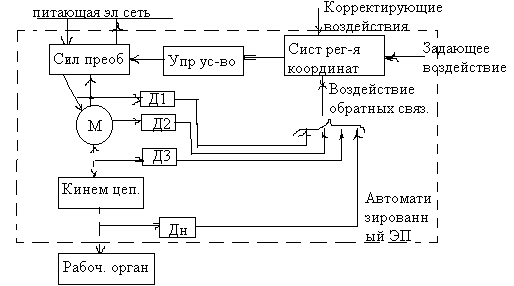
Рис 1
Силовой преобразователь (СП) расположен в начальной части цепочки преобразования энергии при её прямом направлении, и в конечной части этой цепочки - при обратном направлении. Через СП проходит весь поток энергии и, если удаётся найти рациональный способ воздействия на СП, можно регулировать этот поток энергии и тем самым реализовывать разнообразные функции, возлагаемые на электропривод. Устройство, воздействующее на СП, является тем элементом, через который выполняется функция управления преобразователем. На входе управляющего устройства находится система регулирования координат, то есть переменных величин, которые подлежат регулированию в процессе выполнения электроприводом своих функций. Такими регулируемыми координатами могут быть, например, такие, как напряжение, подаваемое на электродвигатель, ток в цепи питания электродвигателя, частота вращения электрической машины, перемещение рабочего органа исполнительного механизма и др.
На систему регулирования координат могут осуществляться различные воздействия - задающее воздействие, воздействие обратных связей, корректирующие воздействия, с учетом которых система регулирования координат вырабатывает результирующий сигнал, поступающий на управляющее устройство СП. Для оценки результата регулирования той или иной координаты на систему регулирования координат должна непрерывно поступать информация о реальном значении той переменной, которая подлежит регулированию. Эта информация поступает в виде стандартизованных электрических сигналов, вырабатываемых датчиками различного вида. Датчики - это информационные устройства, преобразующие тот или иной вид переменной (напряжение, ток, момент двигателя, частота его вращения, перемещение рабочего органа) в стандартизованный сигнал.
На приведённой функциональной схеме пунктирной линией очерчены элементы, совокупность которых определяет такое обобщающее понятие как автоматизированный электропривод. В ряде случаев некоторые виды элементов могут отсутствовать (те или иные датчики, корректирующие воздействия), в других случаях схема может быть усложнена.
Успехи автоматизации технологических процессов зависят от многих факторов - начиная от уровня организации производства, квалификации и психологической готовности обслуживающего персонала принять эту автоматизацию и кончая качеством технических средств её реализации. Последний фактор определяется техническими возможностями и свойствами элементов, из которых реализована та или иная автоматизированная система.
Элементная база автоматизированного электропривода (АЭП) является предметом изучения курса “Элементы автоматизированного электропривода”. Элементы АЭП разнородны и многофункциональны. Им посвящен не один курс дисциплин, изучаемых на нашей специальности. Главным и важнейшим элементом АЭП является электрическая машина, предназначенная для преобразования электрической энергии в механическую, или, наоборот, механической энергии в электрическую. Эти преобразования энергии могут быть реализованы только посредством электрических машин того или иного вида. Этот важнейший элемент настолько многогранен, что он рассматривается в различных изучаемых вами дисциплинах с различных точек зрения. Эта проблема затрагивается в большей или меньшей степени в таких дисциплинах, как ТОЭ, электрические машины, электромеханические устройства, ТАУ и в целом ряде специальных дисциплин. Некоторые свойства системы “СП - электрическая машина” рассматриваются и в дисциплине “элементы АЭП”.
Наряду с рассматриваемым “главным” элементом электропривода- электрической машиной другие элементы изучаются в таких дисциплинах, как “технические средства автоматизации”, “электроника”, “элементы АЭП”.