

2.2.3 Разработка функциональной схемы блока.
Функциональная схема блока приведена на чертеже 8Т5.001.001 Э2. На схеме можно выделить каналы ввода аналоговых и дискретных сигналов, канал ввода частотных сигналов, канал вывода дискретных сигналов.
2.2.3.1 Каналы ввода аналоговых и дискретных сигналов.
Для ввода аналоговых и дискретных сигналов используются модули-преобразователи GrayHill серии 70L/73L. Для ввода аналоговых сигналов с термопар используется двухканальный преобразователь 73L-ITCK. Для ввода токового сигнала с датчика давления используется преобразователь 70L-II420. Для ввода входных дискретных сигналов используется преобразователь 70L-IDCG.
Для передачи информации поступающей с модулей-преобразователей в центральный вычислитель системы используется одна матрица FPGA в составе модуля UNIO 96-5. Выбрана прошивка матрицы из набора стандартных вариантов “Цифро-аналоговый интерфейс опто-модулей GrayHill серии 70L/73L”. Данный вариант из базового набора схем позволяет реализовать в одной матрице FPGA 24 канала цифро-аналогового интерфейса со следующими возможностями:
Конфигурация каналов в произвольной комбинации (вход/выход, цифровой/аналоговый).
Чтение/запись по любому каналу.
Прием последовательного кода по любому нечетному каналу.
Выдача последовательного кода по любому четному каналу.
Информационный обмен между модулем UNIO 96-5 и центральным вычислителем системы осуществляется посредством шины ISA.
2.2.3.2 Канал ввода частотных сигналов.
Частотные сигналы вводятся в систему посредством модулей УФИ. Модуль УФИ преобразует сигнал, поступающий с датчиков частоты вращения в импульсы равной амплитуды. Частота следования импульсов пропорциональна частоте вращения индукторов, расположенных на силовой турбине и газогенераторе.
Индуктором датчика частоты вращения силовой турбины является зубчатое колесо с числом зубьев Z=64, равномерно расположенных по окружности. Индуктор размещается непосредственно на валу турбины. Формула пересчета частоты вращения в частоту выходного сигнала датчика:
Fст(Гц) = Nст(об/мин)/0,9375
Индуктором датчика частоты вращения газогенератора является зубчатое колесо с числом зубьев Z=41, равномерно расположенных по окружности. Передаточное отношение от ротора к индуктору i = 1,1388889. формула пересчета частоты вращения газогенератора в частоту выходного сигнала датчика:
Fгг(Гц) = 0,6 * Nгг(об/мин)
В данном случае возможно два метода измерения частоты.
Первый метод заключается в измерении количества импульсов, наводимых индуктором за известный временной интервал.
Суть второго метода заключается в измерении временного интервала между импульсами наводимыми индуктором.
Согласно требованиям технического задания максимальное время реакции блока БЗД на отработку сигнала ”закрыть СК” составляет 0,03 с. Данное время может быть принято в качестве верхней границы временного интервала измерения частоты.
При использовании первого метода измерения минимальное значение измеряемой частоты может быть найдено по формуле:
Fmin = 1 / tизм
Где tизм – время измерения.
Fmin = 1 / 0.03 с = 33 Гц.
При входной частоте 33 Гц за интервал 0,03 с придет один импульс. Максимально допустимое значение параметра Nст – 6300 Гц. Допустимая погрешность измерения частоты 0,15% (9,45 Гц). Вес каждого импульса при данном методе измерения составляет 33 Гц. Таким образом, потеря одного импульса вызовет погрешность измерения в 33Гц. Данный метод измерения частоты не может быть принят, вследствие неудовлетворения требованиям технического задания.
При использовании второго метода, измерение временного интервала производится счетом импульсов заданной частоты за измеряемый отрезок времени. Количество импульсов фиксированной частоты за время поворота колеса индуктора на 1 зуб может быть вычислено по формуле:
N1 = Fзаполнения / Fиндуктора
Где Fзаполнения – частота следования импульсов заполнения,
Fиндуктора – частота вращения индуктора.
При увеличении измеряемой частоты на величину Δ количество импульсов фиксированной частоты за время поворота колеса индуктора на 1 зуб:
N2 = Fзаполнения / (1 + Δ) * Fиндуктора
Для определения веса одного импульса заполнения примем:
N2 = N1 – 1
Таким образом, вес одного импульса заполнения может быть найден по формуле:
Δ = (Fзаполнения / (Fзаполнения - Fиндуктора)) – 1
При частоте заполнения 500 КГц и входной частоте 6300 Гц вес одного импульса заполнения:
Δ = 0,013.
При частоте заполнения 50 МГц и входной частоте 6300 Гц вес одного импульса заполнения:
Δ = 0,0013.
Допустимая погрешность измерения частоты 0,15% (9,45 Гц). Таким образом, при частоте заполнения 50 МГц приемлемо использование второго метода измерения.
Данный метод реализован на модуле UNIO 96-5. Для реализации измерителя частоты выбрана стандартная прошивка матриц ”Прецизионный измеритель частоты расширенного диапазона”. Данный вариант позволяет реализовать в одной матрице FPGA два одноканальных измерителя частоты со следующими возможностями:
Время анти-дребезга 160 нс.
3 диапазона измерения:
3 Гц – 3000 КГц.
3*10-2 Гц – 1275 КГц.
3*10-3 Гц – 127,5 КГц.
Точность до 24 bit.
Структурная схема измерителя частоты приведена на рисунке 1.
Рисунок 1. Структурная схема измерителя частоты
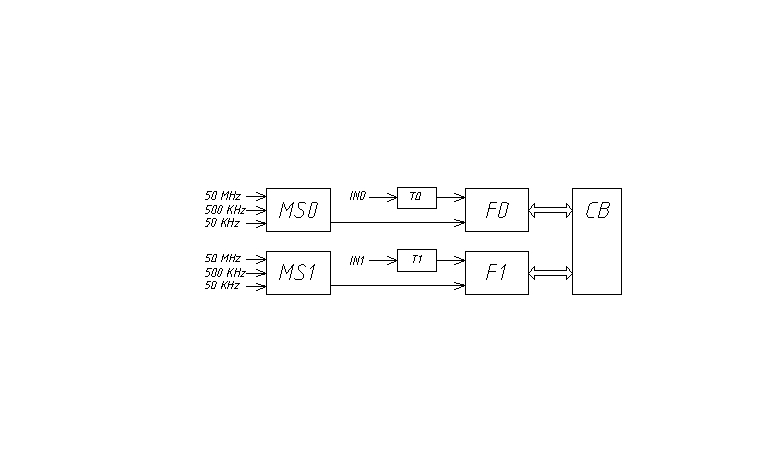
CB – интерфейс шины ISA;
MS0, MS1 – мультиплексор диапазона. Используется для выбора частоты заполнения измеряемого сигнала.
T0, T1 – формирователи строба n-периодов входной частоты.
F0, F1 – измерители частоты.
СВ – интерфейс шины ISA.
Внешняя частота (IN0, IN1) измеряется измерителями частоты (F0, F1) и далее через шину ISA поступает в центральный вычислитель системы модуль 5066. Перед началом измерения центральный вычислитель осуществляет настройку формирователя строба n-периодов входной частоты (Т0, Т1) на 1 период измеряемой частоты. Частота заполнения измеряемого сигнала выбирается равной 50 МГц.