

Шпоры / шпоры тау / 2006дистанционники / Lekcii / Lekcija №18
.docСинтез систем автоматического управления
СИНТЕЗ САУ – выбор структуры и параметров САУ, начальных условий и входных воздействий в соответствии с требуемыми показателями качества и условиями функционирования.
Проектирование САУ предполагает выполнение следующих этапов:
-
Исследование объекта регулирования: составление математической модели, определение параметров, характеристик и условий работы объекта.
-
Формулирование требований к САР.
-
Выбор принципа управления, структуры и первоначальной схемы системы.
-
Выбор элементов схемы регулирования с учетом статических, динамических, энергетических, эксплуатационных и др. требований.
-
Определение законов регулирования и расчет корректирующих устройств, обеспечивающих заданные требования.
-
Уточнение структурной схемы системы регулирования, выбора и расчета ее элементов и параметров.
-
Экспериментальное исследование системы регулирования (или отдельных ее частей) в лабораторных условиях и внесение соответствующих исправлений в ее схему и конструкцию.
-
Проектирование и производство системы регулирования.
-
Наладка системы в реальных условиях работы (опытная эксплуатация).
Проектирование САУ начинают с выбора объекта управления и основных функциональных элементов (усилителей, исполнительных устройств и др.), то есть разрабатывают силовую часть системы.
Заданные статические и динамические характеристики системы обеспечиваются соответствующим выбором структуры и параметров силовой части, специальных корректирующих устройств и всей САУ в целом.
Назначение корректирующих устройств: обеспечить требуемую точность работы системы и получить приемлемый характер переходного процесса.
Корректирующие звенья вводятся в систему различными способами: последовательно, местная ООС, прямое параллельное включение, внешние (вне контура регулирования) корректирующие устройства, охват всей САУ стабилизирующей ООС, неединичная главная обратная связь.
Типы электрических корректирующих устройств постоянного тока: активные и пассивные четырехполюсники постоянного тока, дифференцирующие трансформаторы, тахогенераторы постоянного тока, тахометрические мосты и др.
По назначению корректирующие устройства классифицируются:
-
СТАБИЛИЗИРУЮЩИЕ – обеспечивать устойчивость САУ и улучшать их статические и динамические характеристики.
-
КОМПЕНСИРУЮЩИЕ – уменьшать статические и динамические ошибки при построении САУ по комбинированному принципу.
-
ФИЛЬТРУЮЩИЕ – повышение помехозащищенности систем, например фильтрация высших гармоник при демодуляции сигнала прямого канала.
-
СПЕЦИАЛИЗИРОВАННЫЕ – для придания системе особых свойств, позволяющих улучшить показатели качества системы.
САУ могут быть построены по следующим структурным схемам:
-
С последовательной корректирующей цепью.
Усилитель У должен иметь большое входное сопротивление, чтобы не шунтировать выход корректирующей цепи.
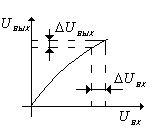
Применяется в случае медленно изменяющихся входных воздействиях, так как при больших рассогласованиях происходит насыщение в реальных нелинейных элементах, частота среза уходит влево и система медленно выходит из состояния насыщения.
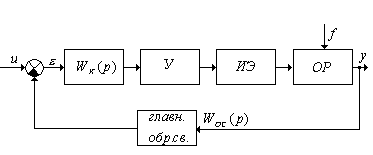
Рис.1.
Последовательная коррекция часто используется в статических системах либо для стабилизации контура с корректирующей обратной связью.
![]() -
уменьшается.
-
уменьшается.
-
Со встречно–параллельной корректирующей цепью.
![]()
Рис.2.
![]() поступает на вход
поступает на вход
![]() как разность и глубокого насыщения не
наступает.
как разность и глубокого насыщения не
наступает.
-
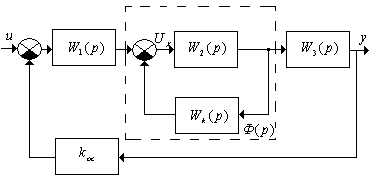
С последовательно–параллельной корректирующей цепью.

Рис.3.
-
С комбинированными корректирующими цепями.
Расчет линейных непрерывных САУ по заданной точности в установившемся режиме работы
Одно из основных требований, которым должна удовлетворять САУ, заключается в обеспечении необходимой точности воспроизведения задающего (управляющего) сигнала в установившемся режиме работы.
Пусть структурная схема САР приведена к виду

Тогда в квазиустановившемся режиме
работы САР рассогласование
![]() представимо в виде сходящегося ряда
представимо в виде сходящегося ряда
![]() ,
,
где
![]() выполняют роль весовых констант.
выполняют роль весовых констант.
Очевидно, что такой процесс может иметь
место только в том случае, если
![]() –медленно
меняющаяся и достаточно плавная функция.
–медленно
меняющаяся и достаточно плавная функция.
Если представить передаточную функцию разомкнутой системы в виде
 ,
,
то при r=0
![]()
при r=1
![]()
![]()
при r=2
![]()
![]()
![]()
при r=3
![]()
![]()
![]()
![]()
1. Расчет установившегося режима
работы САР по заданным коэффициентам
рассогласования (ошибки)
![]()
Точность работы системы в установившемся
режиме определяется величиной
передаточного коэффициента разомкнутой
системы
![]() ,
который определяется в зависимости от
формы задания требований к точности
системы.
,
который определяется в зависимости от
формы задания требований к точности
системы.
Расчет ведется следующим образом.
-
СТАТИЧЕСКИЕ САР. Здесь задается величина коэффициента позиционной ошибки
 ,
по которому определяется
,
по которому определяется
 :
:
 .
.
L ,
,
дБ
20lgkpc
ω, с-1
-
АСТАТИЧЕСКИЕ СИСТЕМЫ 1-го порядка.
В этом случае задан коэффициент
![]() ,
по которому определяется
,
по которому определяется
![]()
Если заданы коэффициенты
![]() и
и
![]() ,
то
,
то
![]() ,
который определяет положение низкочастотной
асимптоты ЛАЧХ разомкнутой системы с
наклоном -20 дБ/дек, а вторая асимптота
имеет наклон -40 дБ/дек при сопрягающей
частоте
,
который определяет положение низкочастотной
асимптоты ЛАЧХ разомкнутой системы с
наклоном -20 дБ/дек, а вторая асимптота
имеет наклон -40 дБ/дек при сопрягающей
частоте
![]() (рис.1).
(рис.1).
Рис.1.
-
АСТАТИЧЕСКИЕ СИСТЕМЫ 2-го порядка.
По заданному коэффициенту
![]() определим kpc:
определим kpc:
![]()
L,
дБ
-40
![]()
ω, с-1