

3. Расчет установившегося режима работы сар по заданной максимальной допустимой ошибке системы с неединичной обратной связью
Пусть априорная информация о входном сигнале сведена к минимуму:
Максимальное по модулю значение первой производной входного воздействия (максимальная скорость слежения) –
 ;
;Максимальное по модулю значение второй производной входного воздействия (максимальное ускорение слежения) –
 ;
;Входное воздействие может быть детерминированным или случайным сигналом с любой спектральной плотностью.
Требуется ограничить максимально
допустимую ошибку системы управления
при воспроизведении полезного сигнала
в установившемся режиме работы величиной
![]() .
.
Требование к точности воспроизведения наиболее просто формулируется для гармонического входного воздействия эквивалентного реальному входному сигналу:
![]()
в предположении, что амплитуда и частота заданы, а начальная фаза имеет произвольное значение.
Установим связь между допустимой
ошибкой воспроизведения входного
воздействия
![]() и параметрами системы и входного сигнала.
и параметрами системы и входного сигнала.
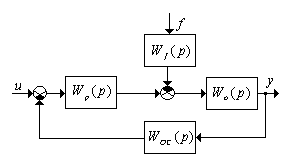
Пусть структурная схема непрерывной САУ сведена к виду (рис.4).

Рис.4.
Ошибка на выходе системы во временной области определяется выражением:
![]() ,
,
где
![]() –
эталонная (безошибочная) выходная
функция.
–
эталонная (безошибочная) выходная
функция.
Можно показать, что вследствие ограничений на скорости и ускорения выходная функция отличается от ступенчатой.
Отобразим последнее выражение в пространство преобразований Лапласа:
 .
.
Отобразим
![]() в пространство преобразований Фурье:
в пространство преобразований Фурье:
 .
.
В области низких частот
(![]() ,
,![]() –постоянные
времени цепи обратной связи)
–постоянные
времени цепи обратной связи)![]() ,
тогда
,
тогда
![]() ,
,![]() ,
,
максимальная амплитуда ошибки определяется по выражению:
![]() .
.
В реальных системах на
низких частотах обычно ![]() ,
ибо следует выполнить требование
,
ибо следует выполнить требование![]() ;
математическое выражение для определения
;
математическое выражение для определения
![]() преобразуется на контрольной частоте
(
преобразуется на контрольной частоте
(![]() )
к виду
)
к виду
![]()
и для того, чтобы выходная
функция воспроизводилась с максимальной
ошибкой не более заданной
![]() ,
ЛАЧХ проектируемой системы не должна
проходить ниже контрольной точки
,
ЛАЧХ проектируемой системы не должна
проходить ниже контрольной точки![]() с координатами
с координатами![]() и
и
![]() .
.
4. Расчет установившегося режима работы статической сау методом предельных переходов
Утверждение
Пусть задана обобщенная структурная схема статической САР:
где
![]() ,
,![]() ,
,![]() ,
,![]() ,
здесь полиномы числителей и знаменателей
не содержат множителяp
(свободные члены их равны единице),
,
здесь полиномы числителей и знаменателей
не содержат множителяp
(свободные члены их равны единице),
![]() –
передаточный коэффициент регулятора,
–
передаточный коэффициент регулятора,
![]() –
передаточный коэффициент объекта по
каналу управления,
–
передаточный коэффициент объекта по
каналу управления,
![]() –
передаточный коэффициент обратной
связи,
–
передаточный коэффициент обратной
связи,
![]() –
передаточный коэффициент объекта по
каналу возмущения,
–
передаточный коэффициент объекта по
каналу возмущения,
причем в первом приближении
статические и динамические передаточные
коэффициенты звеньев приняты равными,
номинальному входному воздействию
![]() соответствует номинальная величина
выходной функции
соответствует номинальная величина
выходной функции![]() по каналу управления, и пусть заданы
величина ступенчатого возмущающего
воздействия
по каналу управления, и пусть заданы
величина ступенчатого возмущающего
воздействия![]() и
и![]() – допустимая статическая ошибка по
каналу возмущения в % от номинального
значения выходной функции
– допустимая статическая ошибка по
каналу возмущения в % от номинального
значения выходной функции![]() .
.
Тогда передаточные коэффициенты системы по каналам управления и возмущения в установившемся режиме равны статическим передаточным коэффициентам замкнутой системы и определяются по формулам:
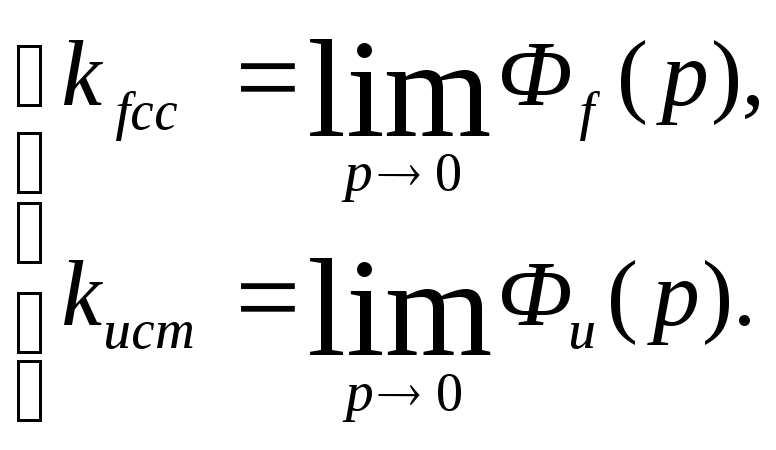 (1)
(1)
Уравнения статики по каналам управления и возмущения имеют вид
 (2)
(2)
Передаточные коэффициенты регулятора и цепи обратной связи определяются по выражениям:
 (3)
(3)