Prakt №11
.docПрактическое занятие №11
Тема: «Анализ и синтез цифровых САУ»
Литература
1. Лукас В.А. Теория управления техническими системами.-Екатеринбург: Изд-во
УГГУ,2005.
2. Бесекерский В. А. Цифровые автоматические системы. – М.: Наука,1976.
3. Дорф Р., Бишоп Р. Современные системы управления. М.: Лаборатория базовых
знаний, 2004.
4. Филлипс Ч., Харбор Р. Системы управления с обратной связью. – М.: Лаборатория Базовых
Знаний, 2001.
.
Пример содержания отчёта
Система управления роботом
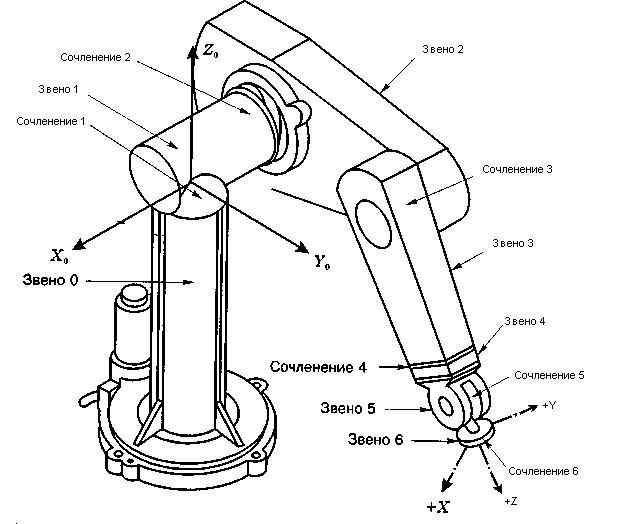
Рис.1. Промышленный робот
1. Техническое описание системы управления положением руки промышленного робота.
Схематическое изображение промышленного робота приведено на рис. 1.
Рука
Двигатель
и редуктор
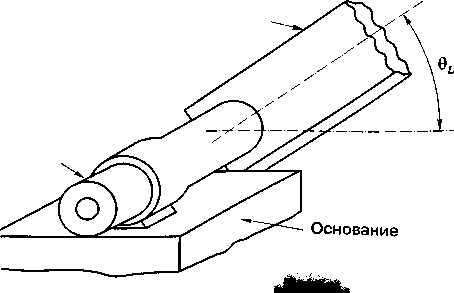
Рис.2. Управление положением руки робота
Исполнительным устройством является двигатель постоянного тока, управляемый по цепи якоря. Двигатель соединён с рукой посредством редуктора с передаточным отношением n = r1/r2. В промышленных роботах вместо сервоприводов могут применяться пневматические и гидравлические исполнительные механизмы.

Рис. 3. Структурная схема системы управления рукой робота (принцип
разомкнутого управления)
У двигателей с постоянными магнитами индуктивность цепи якоря малой величины. Величина параметра В определяется силами трения.

Рис. 4. Система управления рукой робота
Передаточная функция регулятора
![]() ,
что соответствует пропорционально –
дифференциальному закону регулирования.
,
что соответствует пропорционально –
дифференциальному закону регулирования.
2. Математическое описание системы.
Если пренебречь индуктивностью обла-сти якоря, обратной связью по скорости сервопривода и принять Wp(p)=1, то структурная схема системы управления примет вид рис. 5.
R(p)=![]()

Проведем аналитический расчет системы при периоде квантования Т=1 с.
Выражение выходной функции замкнутой системы в форме Z-изображений имеет вид:
![]()
где

![]()
Тогда![]()
Поскольку входной сигнал представляет собой единичную ступенчатую функцию, то
![]()
и
![]() Так
как полосы функции Y(Z)
является комплексными, то не существует
простой процедуры определения обратного
Z-преобразования. Поэтому
значение y(nT)
получены путем разложения Y(Z)
в бесконечный ряд.
Так
как полосы функции Y(Z)
является комплексными, то не существует
простой процедуры определения обратного
Z-преобразования. Поэтому
значение y(nT)
получены путем разложения Y(Z)
в бесконечный ряд.
Конечное значение y(nT) равно
![]()
3. Проведите расчет переходной характеристики системы с помощью скрипта MATLAB.
Проверить выражение Y(Z) и передаточную функцию замкнутой системы, а также найти переходную характеристику можно с помощью программы MATLAB:
Gpnum=[0 0 1]; Gpden =[1 1 0];
[Ac, Bc, Cc, Dc]=tf2ss(Gpnum, Gpden);
[A, B]= c2d(Ac, Bc, 1);
[Gznum, Gzden]=ss2tf(A, B, Cc, Dc)
Pause
Tznum=Gznum, Tzden =Gznum+Gzden
Pause
[A, B, C, D]=tf2ss(Tznum, Tzden);
Sys=ss( A, B, C, D, 1)
[c,t]=step(sys, 0:1:10)
>>
Gznum =
0 0.3679 0.2642
Gzden =
1.0000 -1.3679 0.3679
Tznum =
0 0.3679 0.2642
Tzden =
1.0000 -1.0000 0.6321
a =
x1 x2
x1 1 -0.6321
x2 1 0
b =
u1
x1 1
x2 0
c =
x1 x2
y1 0.3679 0.2642
d =
u1
y1 0
Осуществление выборки времени: 1
Discrete-time model.
c =
0
0.3679
1.0000
1.3996
1.3996
1.1470
0.8944
0.8015
0.8682
0.9937
1.0770
t =
0
1
2
3
4
5
6
7
8
9
10
>>
4 Проведите анализ работы нескорректированной системы по диаграмме Боде.
Квантование оказывает дестабилизирующее влияние на систему. Если частоту квантования выбрать достаточно большой в сравнении с полосой пропускания системы, то при синусоидальном входном сигнале реакция системы между моментами квантования примерно синусоидальна, потеря информации незначительна, а управление корректно.
Так как T/2=0.5, то

Скрипт MATLAB, составленный по частотной передаточной функции разомкнутой системы W(jωω):
Gnum1=[1 -2]; Gnum2=[1 12.14];
Gnum=-0.0381*conv(Gnum1, Gnum2);
Gden=[1 0.924 0];
bode(Gnum, Gden), margin(Gnum,Gden), grid

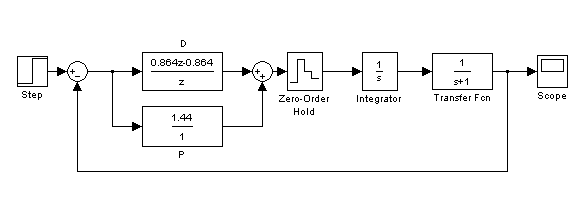
5. Соберите схему модели системы в Simulink и проведите анализ и синтез системы.
5.1 Определите переходную характеристику системы без цифрового регулятора и
оцените влияние периода квантования на работу системы.
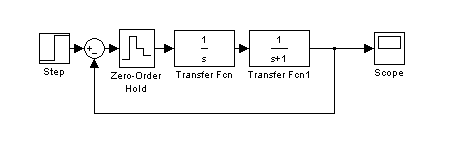

Т=1 с.

Т=2 с.
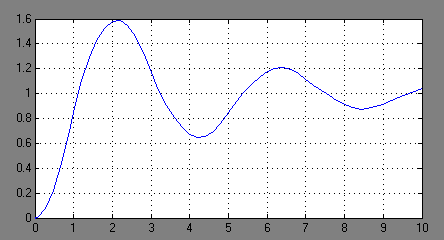
5.2. Введите цифровой ПД-регулятор в систему, снимите переходную характеристику скорректированной системы, определите показатели качества работы системы. Параметры ПД-регулятора определите по методике Зиглера-Николса:
-
Коэффициенты Кi и Kd цифрового ПИД-регулятора устанавливаются равными нулю, а коэффициент Кр увеличивается до тех пор, пока система не потеряет устойчивость;
-
Предельное значение Кр обозначается как Кu , а период автоколебаний как Pu; задаются следующие значения коэффициентов регулятора: Кр=3Кu/5, Kd=3KuPu/40, Кi=6Кu/(5Pu).
В ПД-регуляторе, построенном на базе ПИД-регулятора, Кi=0.
Кu=2.4; Pu=4.8; Кр=3Кu/5=1.44; Kd=3KuPu/40=0.864.