

Prakt №10
.docПрактическое занятие №10
Тема: «Анализ устойчивости микропроцессорных САУ»
Литература
1. Лукас В.А. Теория управления техническими системами.-Екатеринбург: Изд-во УГГУ,2005.
2. Дорф Р., Бишоп Р. Современные системы управления. М.: Лаборатория базовых знаний,
2002.
.
Пример содержания отчёта
Система автоматического регулирования частоты вращения ротора газотурбинного двигателя
Функциональная схема системы





 Напряжение Количество
поступающего топлива
Напряжение Количество
поступающего топлива
М


 икроЭВМ
Объект управления
икроЭВМ
Объект управления


 Дозирующий эл-т
Одновальный Скорость
Дозирующий эл-т
Одновальный Скорость







 + -
WM(z)
ЦАП расхода топлива
газотурбинный вращения
+ -
WM(z)
ЦАП расхода топлива
газотурбинный вращения
двигатель ротора
ГТД



 Цифровой
код ЦД
Цифровой
код ЦД
Структурная схема системы
Дискретная часть системы Непрерывная часть системы

ЦАП
















 u[n]
E[n]
ym[n]
yцап[n]
kцап·yцап[n]
yцап(t)
yдэ(t)
ωp(t)
u[n]
E[n]
ym[n]
yцап[n]
kцап·yцап[n]
yцап(t)
yдэ(t)
ωp(t)



 WM(z)
┴ kцап
Wэ(p)
Wим(p)
Wд(p)
WM(z)
┴ kцап
Wэ(p)
Wим(p)
Wд(p)







 Вход
разом. yцд[n]
yцд(t)
Вход
разом. yцд[n]
yцд(t)



 размыкание
цепи сист.
kцд
размыкание
цепи сист.
kцд
ос. Выход разом.
 цепи
сист. АЦП
цепи
сист. АЦП
Требуется определить дискретную передаточную функцию нескорректированной разомкнутой системы.
Примем W(z)=1. Передаточные коэффициенты цифрового датчика и ЦАП отнесем к непрерывной части системы и обозначим k=kцдkдkцап. Передаточная функция приведенной непрерывной части системы имеет вид
Wпнч(р)=kцапWэ(p)Wим(p)Wд(p)kцд,
где
Тогда где Т – такт квантования сигналов.
где Т – такт квантования сигналов.
Разложим выражение в скобках на простые дроби:


Используя таблицу Z–преобразований, получим Z–изображения слагаемых этого выражения:

 ,
где d=
,
где d=![]() .
.
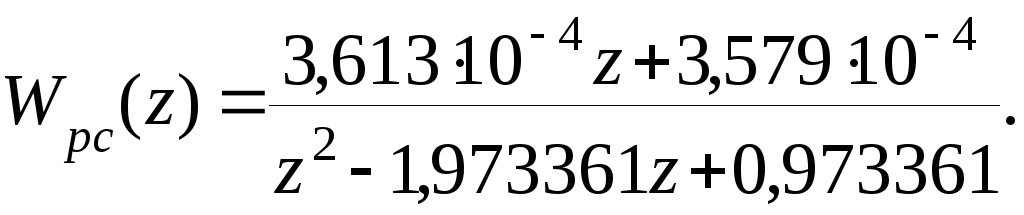
Используя эти преобразования получим:


где b1=T-Tд(1-d); b0=Tд (1-d)-Tд.
При k=1, Tд=1c, T=0,027c будем иметь
Получим псевдочастотную
передаточную функцию путем подстановки
 в Wpc(z):
в Wpc(z):

Введя обозначения:
 ,
,
 ,
перепишем последнее выражение в
более компактной форме:
,
перепишем последнее выражение в
более компактной форме:

Построим асимптотическую логарифмическую амплитудную L(λ) и фазовую θ(λ) частотные характеристики:
L
 ,
θ, град
,
θ, град
дБ

 -20
ΔL-малое число
-20
ΔL-малое число






 λ=1
10 λ=2/T
102 103
104 4,195 105
lgλ
λ=1
10 λ=2/T
102 103
104 4,195 105
lgλ
 74,07 λ,c-1
74,07 λ,c-1

 λ=1/T1*
λ=1/τ*
λ=1/T1*
λ=1/τ*
-40
 -900
-900

 -20
-20


 Δθ - малое
Δθ - малое
-1800 число


-2700
Система близка к границе устойчивости.
Определим дискретную передаточную функцию замкнутой системы:

Перейдем
к
![]() -преобразованию,
сделав замену
-преобразованию,
сделав замену
 :
:

Обозначив a0=2(1+d)-k(b1-b0)=2(1+0,973361)-(3,613·10-4-3,579·10-4)=3,9467186;
a1=2(1-kb0-d)=2(1-3,579·10-4-0,973361)=0,0525622;
a2=k(b0+b1)= 3,613·10-4+3,579·10-4=0,0007192,
получим характеристическое уравнение замкнутой системы:
a0w2+a1w+a2=0.
Согласно критерию Гурвица система устойчива (а0>0,a1>0,a2>0), a2 – малое значение. Система у границы устойчивости.
Оценим устойчивость системы по модулю корней характеристического уравнения дискретной передаточной функции замкнутой системы:
z2-1,973361z+0,973361=0,

z1=1, z2=0,973361.
Система на границе устойчивости.