

Часть электромагнитной мощности, полученной ротором , тратится на покрытие электрических потерь в его обмотке : Рэ2 = 2 І22 = 1 І´22´2 = Рэм . ; (150)
Из (150) можно определить величину электромагнитной мощности
Рэ2 1 І´22´2
Рэм = ____ = _____________ ; (151)
Оставшаяся часть электромагнитной мощности превращается в полную механическую мощность: Р п. мех = Рэм - Р э2 (152)
За вычетом добавочных (трудноучитываемых) потерь:
Р доб = 0,005 Р1 ; (153)
И механических потерь, пропорциональных частоте тока ротора в квадрате:
Рмех n22 ; (154)
полная механическая мощность отдается нагрузке и является выходной полезной мощностью: Р2 = Рп.мех - Р мех - Рдоб ; (155)
Рэ1, Рэ2 и Рдоб - переменные потери, т.к. зависят от токов, т.е. от нагрузки АД.
Рм и Рмех - постоянные потери, т.к. не зависят от нагрузки АД.
КПД АД определяется по известной формуле :
Р2 Р1 - Р
η = _____ = __________ ; (156)
Р1 Р1
где Р - сумма всех потерь в АД.
η





Р2nom
Р2
0
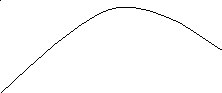
Рисунок 42 - График зависимости КПД АД от нагрузки.
Как видно из рис.42 наибольший КПД достигается при 70% - 80% от номинальной нагрузки.
При перегрузке (Р2 Р2ном) КПД уменьшается из-за сильного роста переменных потерь.
КПД регламентирует температуру нагрева основных частей АД, поэтому АД с болеее низким КПД (АД малой мощности) работают при более высоких температурах обмотки статора, что ведет к уменьшению их надежности.
2.9 МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АД
Развиваемый двигателем электромагнитный (вращающий) момент М создается путем магнитного взаимодействия тока в обмотке ротора с вращающимся магнитным полем статора.
По условию равновесия моментов в установившемся режиме имеем:
М = Мо + М2 = Мс ; (157)
где М - электромагнитный (вращающий) момент двигателя;
Мс - статический момент (момент сопротивления нагрузки);
Мо- момент уравновешивающий момент сопротивления (Мсо),вызванный потерями холостого хода;
М2 - полезный момент, т.е. момент уравновешивающий момент
сопротивления непосредственно рабочей машины.
Электромагнитный момент М пропорционален электромагнитной мощности АД
Рэм
М = ________ ; (158)
о
2 1 2 1
где о = ______ = _______ ,
60
Рэ2 1´22´2
но Рэм = _______ = ___________ , см. (150)
1´22´2
Тогда М= -------------- (159)
о .
В результате подстановки в (159) развернутых выражений для 2, см. (144) и о, а также математических преобразований можно получить формулу для определения электромагнитного момента АД, она же будет являться аналитическим выражением механической характеристики АД; т.е. зависимости М= () либо = (М), = (М):
1 21ф ´2 р
М = __________________________________________ ; (160)
2 1 ( 1 + ´2 /)2 + (х1 + х´2)2
График механической характеристики АД представлен на рис.43. В (160) переменной величиной является только скольжение . Чтобы определить экстремум этой характеристики, нужно продифференцировать (160) и приравнять результат к нулю, т.е.
М
____ = 0 ;
В результате этих действий получим:
´2 ´2
кр = ____________________ ___________ ; (161)
12 + ( х1 + х´2 )2 х1 + х´2
Приближенное значение кр принято, если1 значительно меньше (х1 + х2),что соответствует реальности.
Подставив кр в (160) получим значение максимального (критического или опрокидывающего) момента :
1 21 р
М мах = __________________________________________ ; (162)
2
1
1
+
√ 12
+
(х1
+ х´2
)2

S
n 
Вращение вперед
n2=n1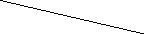
0
A

Sкр














-
М -МП
0 M
1



Mnom MП Mmax
(Мк) (Мкр)
Вращение назад
2
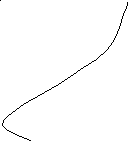
Рисунок 43 - Механическая характеристика АД.
Поскольку 1 (х1 + х´2 ) , то можно записать
1 21 р
М мах ________________________ ; (163)
2 1 (х1 + х´2 )
В начальный момент пуска, когда ротор еще неподвижен (режим короткого замыкания двигателя) =1 и тогда из (160) пусковой момент определится по формуле:
1 12 ´2 р
Мп = Мк = __________________________________________ ; (164)
2 1 (1 + ´2 )2 + (х1 + х´2 )2
Из (160) видно, что М 12 , т.е. даже небольшое снижение напряжения сети 1 вызывает заметное уменьшение электромагнитного момента М.
При включении АД в сеть, магнитное поле статора, не обладающее инерцией сразу же начинает вращаться с частотой 1 = 60 1 / р.
Ротор из-за своей инерции в начальный момент времени остается неподвижным, т.е.
2 = 0 и =1.
Под действием пускового момента Мп, см.(164), ротор начинает вращаться , при этом скольжение уменьшается, а электромагнитный момент увеличивается,см.рис.43.
Когда скольжение достигает своего критического значения кр, момент становится максимальным Ммах.
При дальнейшем уменьшении скольжения момент М также уменьшается, пока не достигнет установившегося значения равного сумме противодействующих моментов, см.(157).
Из механической характеристики АД 2 = (М) следует, что устойчивая работа АД возможна при скольжениях меньших критического, т.е. при кр.
Это
следует из того, что на этом участке
изменение нагрузки на валу АД (т.е
изменение Мс) сопровождается соответствующим
изменением электромагнитного момента
М (т.е. при Мс
Мном
Мо
+
М2
и тогда 2
,
что приводит к М
до
М = Мо
+
М2
),
после чего режим работы АД вновь будет
установившемся, но уже при других
значениях М и Мс
).

При кр работа АД неустойчива, так как, если, например, кр, а М М мах, то даже небольшое увеличение Мс вызовет уменьшение частоты вращения ротора 2, т.е. увеличение скольжения , а значит уменьшение М, что приведет к еще большему уменьшению 2 и увеличению и так далее до =1, когда ротор остановится.
Следовательно для устойчивой работы АД необходимо, чтобы статический момент был меньше максимального электромагнитного момента Мс Ммах, а скольжение меньше критического кр.
Чтобы работа АД была надежной, необходимо чтобы он обладал перегрузочной способностью .
Обычно для АД = 1,7...2,5.
Более высокие для АД с меньшим числом полюсов 2р, т.е. с большей частотой вращения поля статора 1.
На практике вместо формулы (160) пользуются упрощенными формулами определения М, например для определения электромагнитного момента АД средней и большой мощности применяется формула Класса:
2 М мах
М = ________________ ; (165)
/кр + кр/
где
кр
=
ном
(
+
√ 2
-
1 ) ; (166)
Иногда применяется упрощенная формула определения момента для АД любой мощности:
М = См Ф І2 2 ; (167)
где См - конструктивный коэффициент;
Ф - магнитный поток поля статора;
І2 - ток в обмотке ротора при его вращении, см.(141);
2 - угол сдвига фаз между током и ЭДС ротора Е2 .

*)Так
называемая логическая цепочка, в которой
стрелка - означает увеличение параметра;
-
уменьшение параметра; - переход от
одного параметра к другому.

2.10 РАБОЧИЕ ХАРАКТЕРИСТИКИ АД
Рабочие характеристики определяют эксплуатационные свойства АД.
2.10.1 СКОРОСТНАЯ ХАРАКТЕРИСТИКА 2 = (Р2),
см.рис.44, т.е. зависимость частоты вращения ротора 2 от полезной механической мощности АД - Р2 . Т.к. 2 = 1( 1 - ), а Рэ2 = Рэм . , то
S
= Рэ2
Рэм
, т.е.
скольжение, а значит и частота вращения
n2
определяется

отношением электрических потерь в роторе Рэ2 к электромагнитной мощности:
Рэ2
2
=
1
( 1 - _________
;
(168)
n
Рэм
n1=n20





0
P2nom
Р2


Рисунок 44
В режиме холостого хода можно принять Рэ2 0 , поэтому 0, 20 = 1.
С увеличением нагрузки на валу Рэ2 увеличатся, значит скольжение увеличится, т.е. 2 уменьшится.
С увеличением активного сопротивления обмотки ротора 2 угол наклона кривой
2 = (Р2) увеличится, т.к. возрастут электрические потери Рэ2.
2.10.2 МОМЕНТНАЯ ХАРАКТЕРИСТИКА М2 = (Р2),
Р2 9,55P2
см. рис.45. Поскольку М2 = ___ = _____ , то с увеличением нагрузки полезная
2 мощность увеличивается и полезный момент M2
также
пропорционально увеличивается
если
частота вращения 2
постоянна,
т.е. M n2=var

график имеет вид прямой. Однако в АД с
увеличением нагрузки частота вращения n2=const
ротора уменьшается, поэтому график
М2 = (Р2), имеет вид кривой.
0 P

Рисунок 45.
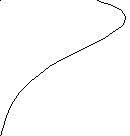
2.10.3 ЗАВИСИМОСТЬ 1 = (Р2), см. рис 46.

cosφ
1 Ỵ



∆
















0.2 P2nom P




0 Рисунок 46.
Коэффициент мощности 1 АД меньше единицы, т.к. ток статора І1 имеет реактивную составляющую, необходимую для создания магнитного поля статора.
В режиме холостого хода 1, наименьший, т.к. ток І0 при любой нагрузке постоянен и имеет реактивный (индуктивный) характер, из-за чего сдвиг по фазе между І1 и 1 большой, т.е. 1 90 о, а 90о= 0.
При увеличении нагрузки увеличивается активная составляющая тока І1 и при нагрузке близкой к номинальной 1= 0,8 - 0,9, т.е. наибольший.
При дальнейшем увеличении нагрузки 1 уменьшается, т.к. увеличивается индуктивное сопротивление обмотки вращающегося ротора Х2 из-за увеличения скольжения, т.е. при Р2 2 2 = 1 Х2 = 2 2 .
Если АД работает недогруженным, то для увеличения 1, нужно уменьшить напряжение сети 1.
Например, в АД работающем недогруженным при соединении фазных обмоток “треу-
гольником” можно их переключить на “звезду”, см.рис.46.
При этом фазное напряжение уменьшится в √ 3 раз, т.е. уменьшится величина магнитного потока, см. (134). Следовательно и ток холостого хода уменьшится в √ 3 раз, а значит увеличится активная составляющая тока статора І1 по отношению к реактивной составляющей І0 , поэтому увеличится 1.
2.10.4 ТОКОВАЯ ХАРАКТЕРИСТИКА І1 = (Р2)
изображена на рисунке 47.
Кривая этой характеристики не выходит из начала координат , т.к в режиме холостого хода (Р2 = 0) двигатель потребляет из сети ток Іо обусловленный потерями холостого хода.
I

I0 P2

Рисунок 47
2.10.5 ЗАВИСИМОСТЬ КПД ОТ ПОЛЕЗНОЙ МОЩНОСТИ
η = (Р2) график этой характеристики изображен на рис.42. Как видно из рисунка КПД наибольший при нагрузках близких к номинальной.
2.11 ЭНЕРГЕТИЧЕСКИЕ РЕЖИМЫ АД
Исходя из свойства обратимости любая энергетическая машина может работать как двигателем, так и генератором, при этом переход из одного режима в другой может происходить без изменения схемы включения.
Поскольку эти режимы отличаются направлением преобразования электрической и механической энергий, то они называются энергетическими.
Всего существует четыре основных энергетических режима и два граничных.
К первым относятся:
1) двигательный режим;
2) режим рекуперативного торможения (генераторный режим);
3) режим торможения противовключением (генераторный режим при последовательном соединении с сетью);
4) режим динамического торможения (режим автономного генератора).
К граничным режимам относятся:
1) режим идеального холостого хода;
2) режим короткого замыкания.
АД может работать во всех возможных энергетических режимах, которые опрделяются величиной и знаком скольжения, см.рис.42.
Двигательный режим осуществляется на участке механической характеристики, когда
0 1; 0 2 1.
Режим короткого замыкания при =1; 2 = 0.
Режим идеального холостого хода - = 0 ; 2 = 1.
Режим рекуперативного торможения осуществляется при разгоне ротора АД каким-либо вспомогательным двигателем (приводным двигателем) до частоты вращения превышающей частоту вращения магнитного поля статора, т.е. когда 2 1, 0.
Режим торможения противовключением осуществляется переключением двух любых фаз питающего напряжения, при этом направление вращения поля статора меняется на обратное, а следовательно и электромагнитный момент меняет свое направление и из вращающего становится тормозящим, т.е. действует против вращающегося по инерции в прежнем направлении ротора. Иначе говоря АД переходит на механическую характеристику для вращения назад, как это и изображено стрелками на рис. 42.
В момент полной остановки ротора АД должен быть отключен от сети иначе ротор начнет вращаться в другую сторону, т.е. произойдет реверс АД. В этом режиме 1,
2 0 (для механической характеристики при вращении вперед).
Режим динамического торможения достигается, когда обмотка статора АД отключается от сети переменного напряжения и подключается к источнику постоянного напряжения, а цепь обмотки ротора должна быть замкнута накоротко или на добавочные резисторы (для АД с фр).
В этом случае постоянный ток протекая по обмотке статора создает неподвижное в пространстве магнитное поле ( поле возбуждения). При вращении (по инерции) ротора в магнитном поле статора в обмотке ротора по закону ЭМИ наводится ЭДС, под действием этой ЭДС в обмотке к.з. ротора возникает ток. Магнитное взаимодействие тока ротора с магнитным полем статора создаст тормозной электромагнитный момент и АД будет работать в режиме генератора независимо от сети переменного напряжения, преобразуя механическую энергию движущихся частей в электрическую, которая будет рассеиваться в виде тепла в цепи ротора.
2.12 ПУСК ТРЕХФАЗНЫХ АД
В момент включения АД, когда его ротор из-за своей инерции еше неподвижен или вращается медленно, вращающееся поле статора пересекает обмотку ротора с максимальной частотой ( 1, = 1), поэтому в обмотке ротора и в обмотке статора текут большие токи, см.(144).
Эти токи называются пусковыми токами:
Пусковые свойства АД определяются:
1) значением пускового тока Іп или его кратностью αп ,
2) значением пускового момента Мп или его кратностью;
3) продолжительностью пуска;
4) плавностью пуска;
5) сложностью пусковой операции;
6) экономичностью пуска (стоимостью пусковой аппаратуры, ее надежностью, потерями энергии в ней).
АД обладает хорошими пусковыми свойствами, если развивает большой пусковой момент при сравнительно небольшом пусковом токе.
При пуске АД его скольжение равно единице, поэтому исходя из формулы (144) пусковой ток ротора определится:
1 1
І2п
=
_____________________________
=
____________________
; (169)

√ (1+ 2)2 + (х1 + х2)2 √ 2 + X2
Если взять Іо 0, то из уравнения токов АД следует, что І1п І2п = Іп
Из (169) и (164) следует, что улучшить пусковые свойства АД можно двумя способами:
1) увеличением активного сопротивления цепи обмотки ротора, т.е. 2(), при этом пусковой ток уменьшится, а пусковой момент увеличится;
2) уменьшением напряжения 1, подаваемого на обмотку статора, при этом уменьшится пусковой ток, но одновременно уменьшится и пусковой момент, что в общем случае нежелательно.
По формуле (144) можно построить электромеханическую характеристику АД, т.е. зависимость частоты вращения от тока в обмотке статора, см.рис.48
S n




Sкр








0




I1
≈ I
'
2

1
0


IП Imax




+ ∞
-∞
Рисунок 48 - Электромеханическая характеристика АД.
На графике электромеханической характеристики АД также имеются характерные точки - это точка короткого замыкания (пуска), где І1= ІП ; = 1; 2 = 0; затем точка идеального холостого хода, где І1 = 0, = 0, 2 = 1 и точка экстремума, в которой
2
= кр = - _______ ; І = Імах = ________ ; Область двигательного режима на графике элек-
1 х1 + х2
тромеханической характеристики лежит в пределах, когда 0 І1 ІП.
Существует несколько способов пуска АД, рассмотрим наиболее простые из них.
2.12.1 ПУСК АД НЕПОСРЕДСТВЕННЫМ ВКЛЮЧЕНИЕМ В СЕТЬ
Электрическая схема включения АД при таком пуске и механическая и электромеханическая характеристики изображены на рис.49.
А В С S n







С2
0 M = f(M)




Sкр
n = f(I )






















С3
1 0 MП
IП
Mmax M,I








С1 

Рисунок 49 - Пуск АД непосредственным включением в сеть.
Достоинство этого вида пуска - простота.
Недостаток заключается в том, что в момент подключения АД к сети пусковой ток в 5 - 7 раз больше номинального, что может вызвать в питающей сети значительные падения напряжения (на 15-20% от номинального напряжения).
Перегрева обмотки статора обычно не бывает, т.к. пусковой ток быстро спадает (при малой инерционности исполнительного органа рабочей машины).
Этот способ пуска применяют для АД с мощностью до 38 кВт.
2.12.2 ПУСК С ПОМОЩЬЮ ПУСКОВОГО РЕОСТАТА
(ДОБАВОЧНЫХ РЕЗИСТОРОВ)
Такой пуск возможен только в АД с фазным ротором, т.к. в нем есть контактные кольца, через которые посредством щеток можно подключить к обмотке ротора добавочные резисторы - пусковой реостат. Тогда активное сопротивление цепи ротора возрастет, т.е. осуществится первый способ улучшения пусковых свойств АД. Схема включения двухступенчатого пускового реостата (доб) и графическое изображение процесса пуска АД изображены на рис. 50.
В процессе пуска АД с ФР пусковой реостат переключают так, чтобы ток ротора был постоянен, а среднее значение пускового момента Мп ср - максимально.
S
n
1 2 3
Rп
























![]()




1 0 M
Mпmin Мпmax
Рисунок 50 - Пуск АД с помощью пускового реостата.
В момент пуска Мп - наибольший, т.к. пусковой реостат полностью включен, т.е. сопротивление цепи обмотки ротора 2 равно сумме сопротивлений обмотки ротора 2 и сопротивлений добавочных резисторов 1 и 2 , т.е. 2 = 2 + 1 + 2 ;
Это первая ступень пуска. Двигатель работает на первой искусственной характеристике (І).
По мере разгона ротора скольжение уменьшается, момент также уменьшается.
Когда М = М п і , рычаг пускового реостата переводится во второе положение, т.е. на вторую ступень.
В этом случае сопротивление цепи обмотки ротора будет меньше, чем на первой ступени на величину сопротивления добавочного резистора 1 и будет равно 2 = 2 + 2.
Двигатель перейдет на вторую искусственную характеристику, т.е. Мп опять станет максимальным, но уже при другом скольжении (частоте вращения). Ротор будет продолжать увеличивать свою частоту вращения, а момент уменьшаться. Как только момент упадет до значения М п і рычаг пускового реостата переводится в третье положение, т.е. сопротивление пускового реостата станет равным нулю и двигатель перейдет на свою естественную механическую характеристику.
Как только электромагнитный момент М сравняется со статическим моментом Мс рабочей машины, частота вращения ротора достигнет установившегося значения и процесс пуска АД будет завершен.
Недостатком такого пуска является его сложность и продолжительность, однако достигаются наиболее благоприятные условия пуска, т.е. Іп = (2...3)Іном.
2.13 РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ АД
Из формулы скольжения (109) можно определить от чего зависит частота вращения ротора 2 в АД: 60 1
2 = 1 (1 - ) = _________ (1 - ) ; (170)
р
отсюда видно, что изменять 2 можно изменением или 1 или р.
2.13.1 РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА АД СКОЛЬЖЕНИЕМ
Этот метод регулирования 2 применим только в нагруженном АД, т.к. в режиме холостого хода 0, а значит 2 1, т.е. частота вращения ротора в этом случае постоянна.
Чаще всего изменяют скольжение двумя способами.