

15. Измерители вертикальной скорости


16. Системы воздушных сигналов



17. Основные свойства гироскопа


18. Траектория движения гироскопа под действием моментов и импульсов сил




19. Использование физического маятника и гироскопа для построения вертикали места



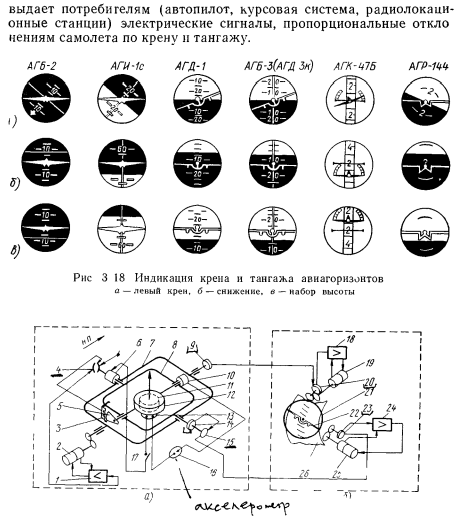
20. Авиагоризонт АГБ-3


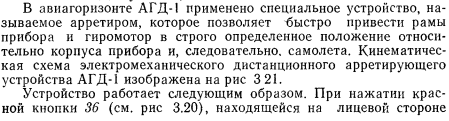
21. Авиагоризонт АГД-1
Авиагоризонт типа АГД-1 (авиационный горизонт дистанционный) состоит из двух приборов: трехстепенного гироскопа с маятниковой коррекцией – гиродатчика, устанавливаемого возможно ближе к центру тяжести самолета; указателей, помещаемых на приборных досках экипажа (до 3-х штук).
Отклонения самолета по крену и тангажу замеряются гиродатчиком и передаются на каждый указатель двумя идентичными следящими системами, особенностью этих систем является использование в них в качестве исполнительных устройств двигателей-генераторов, обеспечивающих скоростную обратную связь для демпфирования колебаний систем.
В АГД-1 применено дистанционное электромеханическое ориентирующее устройство.
Основные
технические характеристики АГД-1 близки
к характеристикам АГБ-3 кроме рабочих
углов, угла тангажа, они больше, чем в
АГБ-3 -








![]()
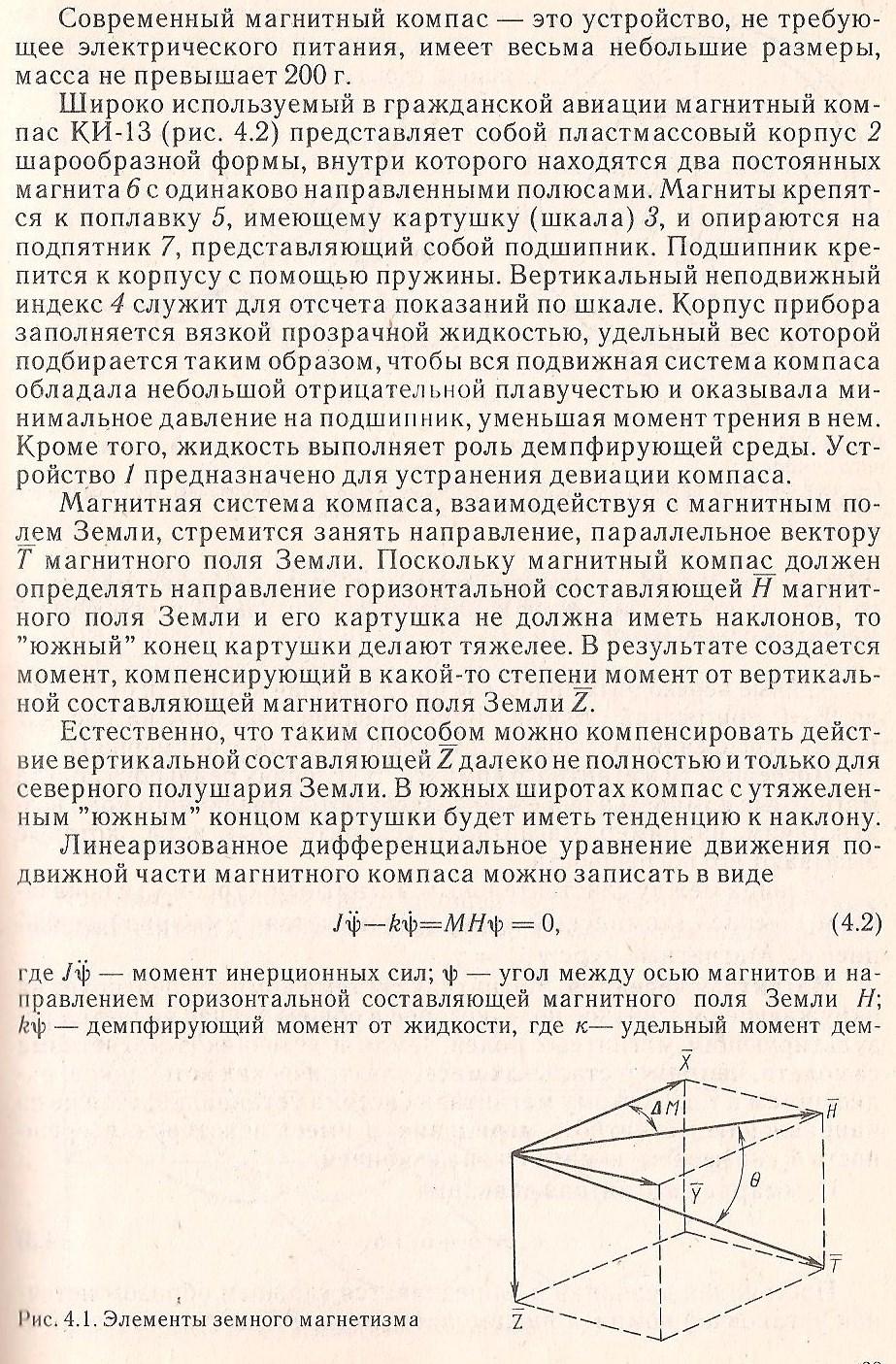
22. Магнитный компас и его погрешности






23. Гирополукомпас ГПК-25 и его погрешности




24. Общие принципы построения курсовых систем



25. Способы комплексирования датчиков курса в курсовых системах


В зависимости от условий полета каждый из датчиков включается поочередно переключателем на общий индикатор. При этом соблюдается следующий принцип: включается тот датчик, который в данных условиях полета имеет наименьшие погрешности. Данная схема имеет недостаток: отсутствие взаимосвязи между датчиками и передача погрешности каждого из них целиком на индикатор. Достоинство: один индикатор (экономия).
Схема курсовой системы, в которой осуществляется взаимная связь датчиков курса, более совершенна

СС
– следящая система;
 .
.
Достоинства: ВЧ-колебания индукционного (магнитного) датчика сглаживаются гиронарегатом. Собственный уход гироскопа компенсируется за счет связи с индукционным датчиком.
26. Методы определения местоположения ВС

27. Принципы построения инерциальных систем навигации


28. Принцип построения автопилота



