

текст лекций / 23. Угольный микрофон. Электродинамический, электромагнитный, пьезоэлектрический микрофоны
.docx
К основным характеристикам и параметрам микрофонов, определяющим их качество, относятся следующие:
1) чувствительность — отношение напряжения на выходе микрофона к воздействующему на него звуковому давлению;
2) динамический диапазон — разность между уровнями предельного звукового давления и собственных шумов;
3) рабочий частотный диапазон;
4) частотная характеристика (ЧХ);
5) характеристика направленности — зависимость чувствительности микрофона от угла между его акустической осью и направлением на источник звука.
Важными параметрами микрофона являются также уровень собственных шумов и выходное сопротивление. Очевидно, хороший микрофон должен быть малошумящим. Выходное сопротивление микрофона должно соответствовать входному сопротивлению аппаратуры, к которой он подключен.
Вообще говоря, без учета условий применения при решении конкретных задач нельзя утверждать, что микрофон с теми или иными характеристиками хуже или лучше. Не для всех параметров также справедливо утверждение: «Чем значение выше, тем лучше».
Например, микрофон с высокой чувствительностью хорош в подслушивающем устройстве для записи звука с большого расстояния. Но тот же микрофон малопригоден в руке солиста, поющего в сопровождении оркестра, т. к. он будет воспринимать не только голос певца, но и искаженные при распространении звуки музыкальных инструментов. Для правильной передачи звучания басовых музыкальных инструментов не обязательно использовать микрофон с высокой верхней граничной рабочей частотой. Хотя, чем шире рабочий диапазон частот (чем меньше нижняя и больше верхняя граничные частоты), тем универсальнее микрофон.
1.2. ЭЛЕКТРОАКУСТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
1.2.1. Угольный микрофон
Основным
прибором телефонной связи, преобразующим
звуковые колебания в электрические
сигналы, является угольный микрофон
(Мк). Он представляет собой капсюль 1,
наполненный
угольным порошком 2 (рис. 1). В порошок
введены подвижный
3
и неподвижный
4
электроды, с помощью которых микрофон
включается в электрическую цепь.
Подвижный электрод соединен с
мембраной 5, приводимой в движение
под влиянием оказываемого на нее
звукового давления.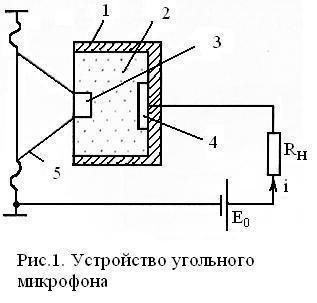
Перемещение подвижного электрода вместе с мембраной происходит на величину, пропорциональную мгновенному значению звукового давления и вызывает изменение плотности угольного порошка, а следовательно, его сопротивление. В результате этого изменяется ток, протекающий от источника Е0 через микрофон, т. е. в цепи микрофона появляется переменная составляющая тока, пропорциональная переменной составляющей звукового давления, и ЭДС источника Е0.
Следовательно, угольный микрофон выполняет две функции. Во-первых, он преобразует звуковые сигналы в электрические. Во-вторых, электрические сигналы возникают в результате преобразования энергии источника постоянного тока Е0. Этот процесс сопровождается усилением сигналов.
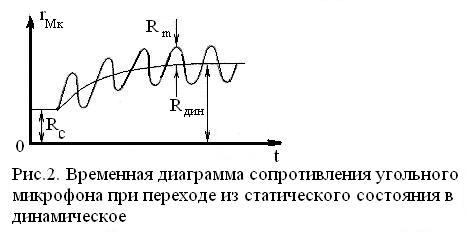
В состоянии покоя через микрофон протекает постоянный ток и под его действием образуются контактные мостики с пониженным сопротивлением. Наличие этих мостиков определяет величину статического сопротивления Кc, которая зависит также от положения микрофона и величины тока или напряжения питания. При воздействии звуковых колебаний контактные мостики разрушаются и среднее динамическое сопротивление Rдин возрастает по сравнению со статическим (рис. 2).
Приведем количественное описание процессов в угольном микрофоне.
Величина переменной составляющей сопротивления с амплитудой Rm обусловлена переменной составляющей гармонического звукового колебания Pmcosωt.
Полное сопротивление угольного микрофона в динамическом режиме изменяется при этом по закону


Используя выражение (1.7) и эквивалентную схему (рис.3), можно определить ток, протекающий по сопротивлению нагрузки Rн:

Введя в выражение (1.8) обозначение Rдин + Rн = R0, получим
Отношение Rm/R0 называют коэффициентом модуляции и обозначают через т. Используя это обозначение и применив к выражению (1.9) разложение в биноминальный ряд, нетрудно получить.
Поскольку
 ,
то формула (1.10)
,
то формула (1.10)
преобразуется к виду
В выражении тока микрофона (1.11) помимо постоянной составляющей и основной гармоники звукового сигнала содержатся вторая и более высокие гармонические составляющие, наличие которых свидетельствует о нелинейных искажениях сигнала.
Если ограничиться рассмотрением амплитуд первой и второй гармоник тока микрофона в формуле (1.11), то величину коэффициента нелинейных искажений можно оценить как
Для того, чтобы нелинейные искажения не вызывали чрезмерного ухудшения разборчивости речи, коэффициент гармоник низкочастотного тракта диспетчерской связи не должен превышать 0,1—0,15. Следовательно, коэффициент модуляции m согласно соотношению (1.12) может достигать наибольших значений 0,2—0,3.
Мощность гармонического сигнала, развиваемая микрофоном в нагрузке, определяется по первой гармонике тока:
где
 ,
как это следует из выражения (1.11).
,
как это следует из выражения (1.11).
С учетом ранее принятых обозначений равенство (1.13) приводится к виду
Поскольку увеличивать мощность за счет роста коэффициента модуляции нежелательно из-за ограничений по уровню нелинейных искажений, то следует выяснить влияние остальных величин, входящих в выражение (1.14). Увеличение напряжения питания должно вести к увеличению мощности сигнала. Однако это привело бы к росту тока микрофона и увеличению мощности, рассеиваемой на сопротивление угольного порошка. Тепловые процессы вызывают спекание угольных зерен. Сначала это проявляется на уменьшении переменной составляющей тока микрофона и снижении мощности сигнала. По мере развития процесса возникают необратимые изменения параметров микрофона.
Изменение сопротивления нагрузки Rн оказывает влияние на величину мощности сигнала. Причем она падает до нуля при Rн=0 и Rн=∞. Из этого следует, что P~ принимает максимальное значение при некоторой величине Rн.opt. Используя известное правило отыскания оптимума
(P~)Ra
=
получим
Rн.opt=Rдин (1.15)
что соответствует режиму согласования.
Максимальная мощность, выделяемая в согласованной нагрузке, как вытекает из выражения (1.14) и (1.15), составляет
P~max
=
 (1.16)
(1.16)
Ток питания микрофона, определяемый из выражения (1.11) соотношением
E0/R0, представляет собой параметр, зависящий от типа и сопротивления микрофона. В микротелефонных трубках аппаратов телефонной и громкоговорящей связи применяются микрофонные капсюли типа МК-14 и МК-16 (рис.4). Они разделяются по сопротивлению на три группы, указанные в табл. 1.2, и должны питаться соответственно указанными в ней токами.
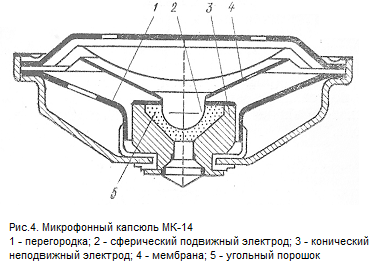
Таблица 1.2
|
Тип капсюля |
Сопротивление, Ом |
Ток питания, мА |
Область применения |
|
Низкоомный.... |
30-65 |
20-80 |
На коротких линиях в системе с низковольтным питанием |
|
Среднеомный . . . |
60-145 |
25-60 |
На линиях средней протяженности |
|
Высокоомный . . . |
145—300 |
12-25 |
На длинных линиях |
Используя эти данные, нетрудно определить но формуле (1.16) мощность сигнала, выделяемую в оптимальной нагрузке. Например, в случае высокоомного микрофона (Rдин ≈ 200 Ом) при напряжении питания Е0 = 12В и коэффициенте модуляции m = 0,2, который соответствует нормальной громкости голоса, она составляет
P~max
=
 =
=

Подведенная к микрофону мощность звуковых волн при нормальном разговоре, как указывалось в п. 1.3, имеет порядок 5 мкВт. Следовательно, угольный микрофон, преобразуя звуковые сигналы в электрические, одновременно создает их усиление по мощности в 720 раз или на 28,6 дБ. Для нормальной связи важно, чтобы затухание, вносимое остальными элементами разговорного тракта, не превышало этой величины. Иначе потребуется включить в тракт дополнительно электронный усилитель,
1.2.2. Электродинамический микрофон
Широкое применение в аппаратах ГГС наводят электродинамические микрофоны с подвижной катушкой, которая прикрепляется к магнитной системе гофрированным эластичным воротником (рис.5). Микрофон состоит из цилиндрического постоянного магнита 5, керна 6, кольцевого верхнего 1 и дискового нижнего 4 фланцев, выполняющих роль магнитопровода.
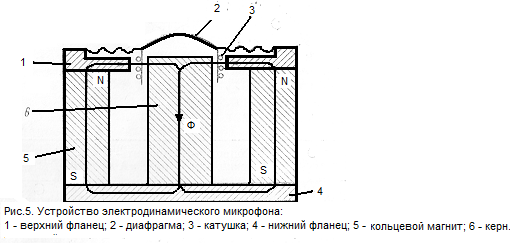
В кольцевом зазоре между керном и верхним фланцем под действием постоянного магнита образуется радиально ориентированное магнитное поле, в котором помещается катушка 5, укрепленная на диафрагме 4.
Витки катушки пересекаются магнитными силовыми линиями потока Ф.
Диафрагма изготавливается из легкого и тонкого материала (например, алюминиевой фольги) и имеет выпуклую форму, придающую ей прочность. Под действием звуковых колебаний она перемещается пропорционально звуковому давлению. При движении катушки в ней наводится ЭДС, определяемая согласно закону электромагнитной индукции как
e
=
 (1.17)
(1.17)
где n — число витков катушки;
dФ/dt — скорость изменения потока в катушке, вызванная ее перемещением.
Выражение (1.17) можно представить иначе:
e
=
 (1.18)
(1.18)
Если распределение потока по высоте зазора равномерное, то dФ/dx = А0 — постоянная величина, a dx/dt = v — скорость перемещения катушки.
При гармоническом характере звукового колебания катушка перемещается по закону
x = Lm cosωt (1.19)
Подставляя выражение (1.19) в уравнение (1.18), получим
e = nA0Lmω sinωt.
Амплитуда ЭДС, развиваемой микрофоном, прямо пропорциональна амплитуде и частоте колебания катушки или воздействующих на мембрану звуковых волн. Таким образом, частотная характеристика электродинамического микрофона должна иметь подъем в области верхних частот. Однако ее удается выравнить путем уменьшения амплитуды колебаний катушки с ростом частоты. Это достигается конструктивными мерами.
Электродинамические микрофоны обладают на порядок меньшими нелинейными искажениями по сравнению с угольными микрофонами, широкой полосой воспроизводимых звуковых частот (102—104 Гц), высокой надежностью эксплуатации, устойчивостью к сотрясениям, изменениям температуры среды и влажности воздуха. В аппаратах ГГС используются микрофоны типов МД-45, МД-66А и др.
Электродинамический микрофон не нуждается в источнике питания для преобразования акустических сигналов в электрические. Однако, преобразуя один вид энергии в другой, он не создает усиления по мощности, как угольный микрофон. Поэтому электродинамический микрофон должен работать с электронным усилителем. Напряжение сигнала, развиваемое этим микрофоном на согласованной нагрузке, составляет около 1 мВ. Внутреннее сопротивление микрофона порядка 200 Ом позволяет легко согласовать его с кабелем, который используется для подвода сигналов к усилителю.
Электродинамические микрофоны обладают обратными свойствами и могут выполнять функции звукопроизводящих устройств.
1.2.3. Электромагнитный микрофон
Отличительной особенностью электромагнитных микрофонов является то, что катушки закреплены в них неподвижно, а ЭДС индуктируется под влиянием изменяющегося магнитного потока. Принцип действия такого устройства можно пояснить на примере микрофона типа ДЭМШ-1 (рис.6) с дифференциальной электромагнитной системой, обеспечивающей повышенную шумостойкость.
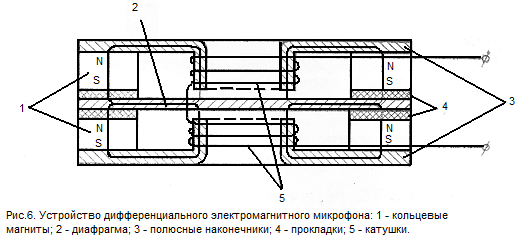
Микрофон содержит два кольцевых магнита 1, между которыми помещена диафрагма 2, изготавливаемая из магнитомягкого материала. Магнитный поток Ф проходит через полюсные наконечники 3 и диафрагму. На наконечники надеты две катушки 5, соединенные последовательно.
Под действием звуковых волн диафрагма совершает колебательные движения, в процессе которых изменяются зазоры между ней и полюсными наконечниками. Это приводит к изменению сопротивления магнитной цепи. При гармоническом колебании диафрагмы сопротивление магнитной цепи содержит постоянную величину R0 и переменную, составляющую с амплитудой Rm
rМк = R0+Rm cosωt (1.20)
Используя аналогию закона Ома для цепи, в которой источник ЭДС представлен магнитодвижущей силой (МДС) М0, ток — магнитным потоком Ф, а сопротивление определено в соответствии с выражением (1.20), получим
Ф
=
 (1.21)
(1.21)
Выражение (1.21) соответствует уравнению (1.9), преобразование которого дает аналогичный результат
Ф
=
 (1.22)
(1.22)
где m = Rm/R0 — коэффициент модуляции.
Из выражения (1.22) определяются:
Ф1
=
 — первая
гармоника магнитного потока;
— первая
гармоника магнитного потока;
Ф2
=
 —
вторая гармоника магнитного потока.
—
вторая гармоника магнитного потока.
Согласно закону электромагнитной индукции (1.17) и катушках микрофона образуется ЭДС
-
первой гармоники e1 =
 (1.23)
(1.23) -
второй гармоники e2 =
 (1.24)
(1.24)
В катушках микрофона индуктируется ЭДС противоположной полярности. Это объясняется тем, что движение диафрагмы вверх (см. рис.6) увеличивает магнитный поток в верхней катушке и уменьшает в нижней. Однако их можно соединить так, чтобы направление токов в катушках совпадало по фазе.
Коэффициент нелинейных искажений при ограничении рассмотрения второй гармоникой сигнала на основании выражений (1.23), (1.24) составляет величину kг = m.
Таким образом, электромагнитному микрофону присущи частотные и нелинейные искажения, вытекающие из принципа его работы. Прямо пропорциональная зависимость уровня сигнала от частоты, представленная выражением (1.23), частично корректируется использованием механического резонанса диафрагмы в области частоты 1,5 кГц. Тем не менее частотная характеристика обладает значительной неравномерностью в рабочем диапазоне. Особенно плохо микрофон воспроизводит низкочастотные сигналы.
Во избежание чрезмерных нелинейных искажений микрофон должен работать с малым коэффициентом модуляции m <0,1. Это приводит к понижению его чувствительности, т. е. получению низкого уровня напряжения на выходе микрофона, как следует из выражения (1.23). Поэтому электромагнитный микрофон используется только в сочетании в усилителем.
Однако ДЭМШ-1 обладает важными достоинствами. Он реагирует лишь на разность звуковых давлений по обеим сторонам диафрагмы и относится к микрофонам градиента давления. Поэтому удаленные от микрофона источники звука, создающие практически одинаковые звуковые давления на обеих его поверхностях, не воспринимаются. Такие источники обычно являются мешающими к, следовательно, микрофон обладает повышенной устойчивостью к акустическим помехам. Кроме этого, он обладает ярко выраженным направленным действием. Независимо от удаленности звуки, приходящие к плоскости диафрагмы под углом 0°, образуют нулевую разность давлений и также не воспринимаются. Когда же источник звука располагается в непосредственной близости от микрофона (1—2 см) перпендикулярно поверхности диафрагмы, тогда разность давлений значительна, и на выходе микрофона появляется сигнал. Поэтому микрофоны типа ДЭМШ-1 и более поздней разработки ДЭМШ-4 находят применение в абонентских авиационных гарнитурах типа АГ-2 и АГ-3. Они обеспечивают разборчивость не менее 94% передаваемых слов при интенсивности окружающего шума до 115 дБ.
Авиагарнитуры содержат помимо микрофона с усилителем пару головных телефонов. Они входят в комплект некоторых типов диспетчерских переговорных устройств (ДПУ) и подключаются к ним с помощью четырех проводного шнура с разъемом. Для питания транзисторного микрофонного усилителя постоянным током используется пара проводов, по которой передаются сигналы от этого усилителя.
Помимо шумостойкости, дифференциальные электромагнитные микрофоны имеют малые габариты и массу, высокую эксплуатационную надежность.
Электромагнитный микрофон обладает обратимыми свойствами и может использоваться в качестве телефона. В авиагарнитуре АГ-3 получил применение электромагнитный телефон с дифференциальной магнитной системой.
1.2.4. Пьезоэлектрический микрофон
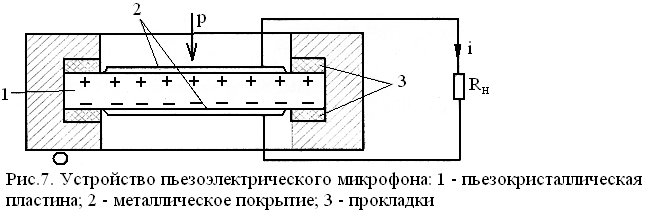
Принцип работы такого микрофона основан на использовании пьезоэффекта. При деформации пластины из пьезокристалла, вызываемой звуковым давлением р, на ее противоположных поверхностях образуются разноименные электрические заряды и создается разность потенциалов (рис.7). Величина и полярность разности потенциалов зависят от силы и направления ее воздействия па пластинку 1. Таким образом, звуковые колебания преобразуются в электрические сигналы. Для включения пьезокристалла в электрическую цепь на поверхности пластины 1 наносятся металлические покрытия.