

3. Основные свойства объекта управления.
Аккумулирующая способность (ёмкость) – способность объекта накапливать рабочую среду или энергию (ёмкость резервуара, момент инерции вращающихся частей турбогенератора, теплоёмкость объёма жидкости.)
Самовыравнивание – способность объекта самостоятельно, без участия регулятора приводить возникающее несоответствие между притоком и расходом рабочей среды к нулю, а регулируемую величину к новому
установившемуся значению. Иногда под самовыравниванием понимают
устойчивость - способность объекта после кратковременного внешнего
воздействия с течением времени возвращаться к исходному состоянию или
близкому к нему.
Время разгона объекта - принято называть полным временем разгона объекта продолжительность процесса самовыравнивания при начальном возмущающем воздействии, равном единице, в течение которого, начиная от нуля, регулируемая величина достигает (1 — 1/n)—части своего номинального значения. Обычно принимают n = 100.
Постоянная времени объекта - время разгона объекта при отсутствии самовыравнивания. Для определения этого времени Та следует провести касательную к кривой разгона r (t) в начальной точке и определить точку пересечения этой касательной с прямой номинального значения регулируемой величины.
Для объектов, не имеющих самовыравнивания, значения времени разгона Т и постоянной времени Та совпадают.

4. Назначение и состав регулятора.
Регулятор (АУУ – автоматическое управляющее устройство) – устройство, осуществляющее воздействие на управляемый объект в соответствии с заложенным в нём законом управления.
В состав регулятора входят следующие элементы:
- чувствительные датчики
чувствительные датчики
преобразовательные
- измерительные Измеряют параметр или сигнал рассогласования
усилительные усилители
- исполнительные перемещают регулирующие органы
(электродвигатели, гидро- и сервоприводы.). Исполнительный элемент – последнее звено регулятора.
элементы корректирующих цепей. (обратная связь)

![]()
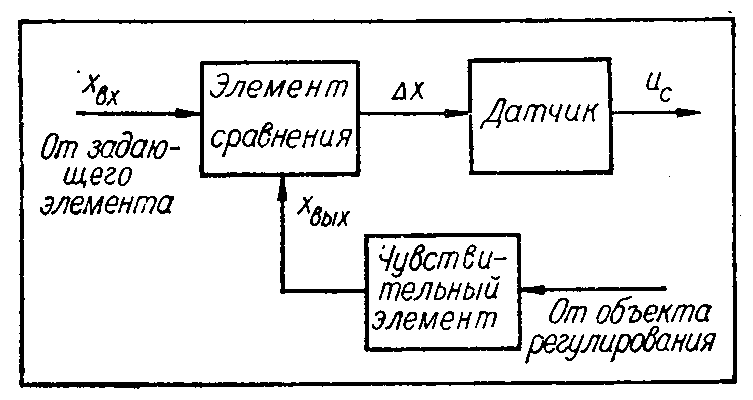
Рассмотрим функциональную схему системы автоматического регулирования (рис. 11), которая состоит из объекта регулирования ОР и регулятора (автоматического управляющего устройства). В этой системе функционально необходимыми элементами, т. е. такими элементами, при помощи которых реализуется принцип управления по отклонению, являются объект регулирования ОР и измерительное 1, усилительное 2 и исполнительное 4 устройства.
В общем случае автоматический регулятор может рассматриваться состоящим из группы элементов, каждый из которых имеет свое определенное назначение.
В отдельных случаях некоторые из этих элементов не входят в состав регулятора или входят в объединенном виде с другими. Ниже приводятся краткие сведения об этих элементах.
а) Измерительные (чувствительные) элементы и датчики
Назначение измерительных элементов измерять в процессе регулирования действительное значение регулируемой величины или основного возмущающего воздействия в зависимости от избранного принципа регулирования.
В связи с этим выходная мощность элемента весьма невелика и обычно недостаточна для непосредственного приведения в движение регулирующего органа.
По этой причине измерительные элементы регулируемых величин в системах регулирования часто называют чувствительными элементами.
К измерительному элементу часто присоединяют преобразовательный элемент. Последний преобразовывает измеряемую неэлектрическую величину в электрическую или в другую, необходимую по условиям работы системы.
Измерительные элементы систем регулирования, соединенные с такими преобразователями, часто называют датчиками.
Требуемое значение регулируемой величины вырабатывается в задающем устройстве ЗУ. ЗУ может входить в состав регулятора и являться тогда частью измерительного устройства. Оно может также находиться на значительном расстоянии от автоматической системы и быть связанным с ней дистанционно (по проводам или по радио).
в) Элементы сравнения (датчики рассогласования)
Назначение элемента сравнения состоит в определении рассогласования между действительным и предписанным значениями , регулируемой величины и выдачи управляющего сигнала регулятору. Элемент сравнения часто совмещается с задатчиком и измерительным элементом.
Измерительное устройство вырабатывает сигнал ис, называемый иногда сигналом ошибки, который пропорционален отклонению Ах регулируемой величины хВь.х от требуемого значения хвх:
![]()
где kc^- коэффициент передачи измерительного устройства.
![]()
Усилительное устройство * усиливает сигнал ошибки до величины иу, достаточной для управления исполнительным устройством. Усиление сигнала ошибки происходит за счет энергии внешнего источника. В простейших системах, где сигнал ошибки имеет достаточную мощность, усилительное устройство может отсутствовать. Однако такие системы, которые называют системами прямого регулирования, находят ограниченное применение из-за недостаточной точности регулирования.
е) Исполнительные элементы
Назначение исполнительных элементов — непосредственно воздействовать на регулирующие органы объекта.
В качестве исполнительных элементов применяются различные вспомогательные двигатели (серводвигатели): электрические, гидравлические и пневматические; а также различные механизмы, могущие передавать усилия с одного конца механизма на другой его конец.
При этом чувствительный элемент воздействует только на управляющий орган вспомогательного механизма. Управляющий орган сервомотора можно рассматривать как некоторый усилитель, поэтому во многих трудах по теории регулирования сервомоторы относят к категории усилителей.
Исполнительный элемент является последним звеном регулятора.
Исполнительное устройство вырабатывает управляющее воздействие и, которое через регулирующий орган (его мы отнесем к объекту регулирования) прикладывается к объекту регулирования с тем, чтобы свести к нулю рассогласование.
ж) Корректирующие устройства
Для улучшения динамических свойств в систему, кроме рассмотренных функционально необходимых элементов, вводят корректирующие устройства, которые в зависимости от места включения бывают последовательными и параллельными. Последовательное корректирующее устройство 3 включается в цепь сигнала ошибки и обычно находится между отдельными каскадами усилителя. Параллельное корректирующее устройство 5 выполняется в виде местных обратных связей, которыми охватываются наиболее инерционные элементы
Корректирующее устройство, путем различных дополнительных воздействий на рабочий процесс системы, изменяет протекание процесса регулирования. Эти воздействия могут быть пропорциональны регулируемой величине или какому-либо другому избранному параметру, или пропорциональны скорости изменения избранных параметров, а в некоторых случаях и ускорению.
Иногда требуется, чтобы дополнительное воздействие корректирующего устройства было пропорционально интегральному значению изменения избранного параметра за заданный промежуток времени.
Если в регуляторе отсутствует усиление сигналов управления по мощности, то он называется регулятором прямого действия. В регуляторе прямого действия измерительное устройство непосредственно соединяется с регулирующим органом.
Регулирующий орган непосредственно воздействует на регулируемую среду, поступающую в объект регулирования с целью количественного или качественного изменения этой среды для поддержания заданного значения регулируемого параметра.
Как правило, регулирующий орган тесно связан с объектом регулирования и, во многих случаях, конструктивно встроен в объект. (например, у всех силовых двигателей).
Для возможности управления энергоблоком в его конструкции предусмотрены специальные клапаны на трубопроводах питательной воды и пара, направляющие аппараты вентиляторов и т. д.
Разделение всех элементов, входящих в цепь регулирования, на регулируемый объект и автоматический регулятор в ряде случаев оказывается условным, так как некоторые из элементов схемы в равной степени можно отнести и к регулятору и к объекту (например, регулирующий орган).
Поплавковый
регулятор уровня.
Одним из первых в мире технических
регуляторов является поплавковый
регулятор уровня жидкости, построенный
И. И. Ползуновым в 1795 г. для поддержания
постоянного уровня воды в паровом котле.
Сейчас регуляторы такого типа находят
широкое применение в технике. Примером
простейшего и в то же время наиболее
распространенного современного
регулятора уровня является поплавковая
камера автомобильного карбюратора
(рис. 1.24, а).

Объектом регулирования является камера 1, в которой уровень бензина Н непосредственно измеряется положением поплавка 2. Системой рычагов с поплавком связана игла 3, регулирующая приток бензина в камеру Q. При уровне Н = Н0 игла полностью запирает канал притока бензина, т. е. Q = 0. Величина H 0 задает требуемое значение регулируемой величины; она устанавливается при наладке регулировкой рычага иглы.
Внешним неконтролируемым воздействием служит расход бензина Q, поступающего к жиклерам двигателя. Этот расход приводит к уменьшению уровня в поплавковой камере.

Функциональная схема рассматриваемого регулятора показана на рис. 1.24, б. В ней выделено два элемента системы: поплавковая камера, служащая объектом, совмещенным с измерительным устройством, на вход которого подается разность Q - G, а выходной величиной является уровень бензина H; исполнительное устройство, представляющее собой управляемый изменением положения поплавка и перемещением иглы канал притока бензина, задающий величину Q.
Поплавковый
регулятор уровня.
Зависимость между перемещением поплавка
е
= Н0
— Н по
отношению к заданному уровню Н0
и
скоростью притока бензина Q в поплавковую
камеру выражается некоторой монотонной
функцией Q (e). Учитывая уравнение
резервуара (1.3), для регулятора можно
записать уравнение:
![]()
которое
соответствует общему выражению (2.1) при
x![]() =
H,.
v,
=
H0,
f
=
H,.
v,
=
H0,
f![]() =G.
=G.
.В
качестве координаты вектора у можно
принять y![]() =Н.
Структурная
схема, соответствующая уравнению (2,3),
представлена
на рис. 2.2
=Н.
Структурная
схема, соответствующая уравнению (2,3),
представлена
на рис. 2.2
