

лекции_ 2
.pdfСтатические свойства САУ
●Статическая характеристика:
x2=K x1
●r — число интегрирующих звеньев, входящих последовательно в разомкнутую САУ
●Классификация САУ по виду статической
характеристики:
– статические |
r=0 |
– астатические |
r 1 |
● r — порядок астатизма системы

Точность в статическом режиме
● Уравнение статического режима:
x2=W замк 0 x1=1 WW 10 0W 0 x1
1 2
● для астатической САУ |
W 0 ∞ |
|||
● для статической САУ |
W 0 =K |
|||
x |
= |
K П |
x |
|
1 K |
|
|||
2 |
|
|
1 |
|

Показатели качества переходного процесса
●Установившееся значение и его погрешность:
h ∞ =lim h t |
= 1−h ∞ |
t∞
●Длительность переходного процесса и точность работы:
t tп : h t −h ∞ h t0 =hmax
● |
Перерегулирование: |
= |
hmax−h ∞ |
|
h ∞ |
||||
● |
Число колебаний |
|
||
|
|
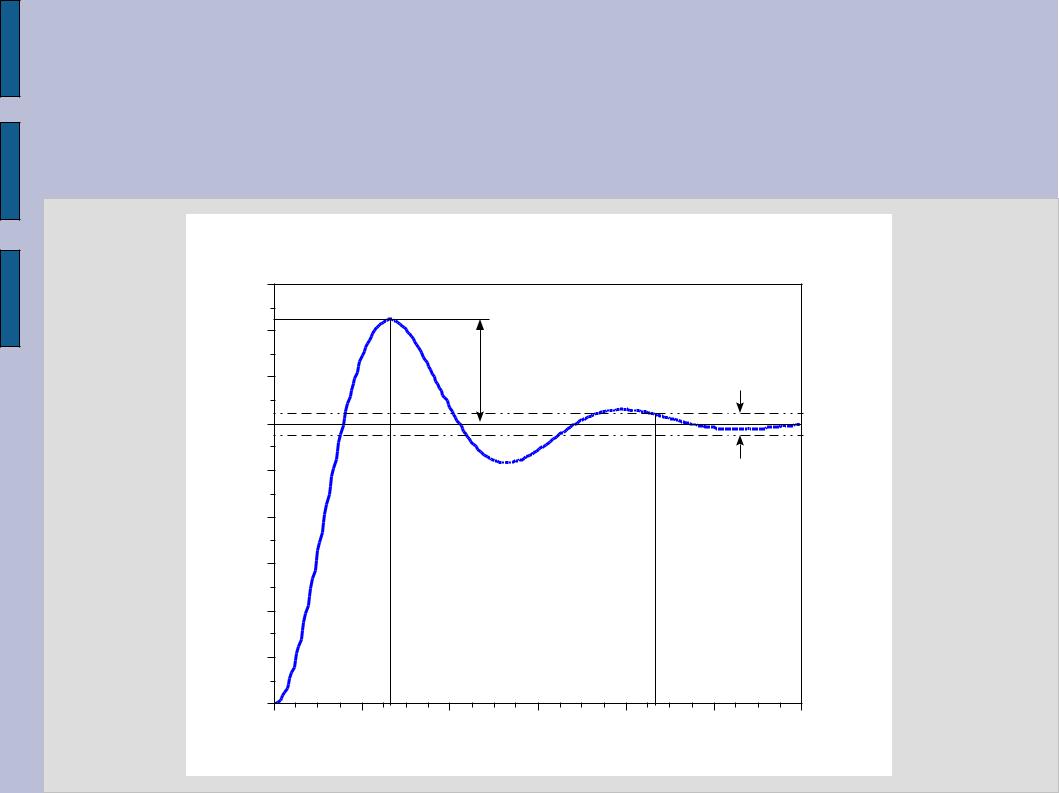
Показатели качества |
|||||||
переходного процесса |
|||||||
1 |
.8 |
|
|
|
|
|
|
hmax 1.6 |
|
|
h ∞ |
|
|
|
|
1 |
.4 |
|
|
|
|
2 |
|
h ∞ 1.2 |
|
|
|
|
|
||
|
|
|
|
|
|
||
1.0 |
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
0.0 |
5 t0 |
|
|
20 tп |
|
|
|
|
0 |
10 |
15 |
25 |
30 |
||
Методы анализа качества переходного процесса
● Прямые методы
– аналитические
– численные
● Косвенные методы
– корневые
– частотные (анализ АФХ)
– интегральные
∞
I 1=∫ t dt
|
0 |
|
∞ |
|
|
I 2=∫ t 2 dt , |
t 0 при |
t ∞ |
0
Корневые методы
●Соответствие между корнями и составляющими переходного процесса:
pr=− r |
Cr e− r t |
pq=− q± j q |
Cq e− q t sin q t q |
●η - степень устойчивости (корневой показатель абсолютного затухания)
tп 1 ln 1 , =min{ i }, =0.01−0.05
● Корневой показатель колебательности:
m= i
i
Синтез САУ
●Основные подходы:
–инженерный синтез (определение оптимального закона регулирования и расчет параметров регулятора)
–техническая реализация САУ
–расчет корректирующих устройств
●Задачи инженерного синтеза:
–достижение требуемой точности
–обеспечение приемлемого характера переходных процессов

Классификация регуляторов
●П-регуляторы (пропорциональные или статические)
●И-регуляторы (интегральные или астатические)
●ПИ-регуляторы (пропорциональноинтегральные)
●ПД-регуляторы (пропорциональнодифференциальные)
●ПИД-регуляторы (пропорционально- интегрально-дифференциальные)
П-регуляторы
=k р
● Использование жесткой ОС
W П p =k р
Wраз p =W П p W ОУ p =k р W ОУ p
●Преимущества: простота конструкции, пропорциональность скоростей
●Недостатки: наличие статической погрешности (применение с неустойчивыми ОУ)

И-регуляторы
|
|
t |
|
|
|
1 |
t |
|
|
||
=k р∫ d = |
∫ d |
||||||||||
|
|||||||||||
|
|
0 |
|
|
T И 0 |
|
|
||||
● Отсутствует внутренняя ОС |
const t |
|
|||||||||
W И p = |
k р |
= |
|
1 |
|
|
|
= |
|||
|
|
|
|
|
|
T И |
|||||
p |
|
T И |
p |
|
|||||||
|
|
|
|
|
|||||||
Wраз p =W И p W ОУ p = kpр W ОУ p
●Преимущества: простота конструкции, отсутствие статической погрешности
●Недостатки: относительно невысокая скорость регулирования