

Принцип действия синхронного двигателя
Синхронная машина обратима и может работать как в режиме генератора, так и в режиме двигателя.
Конструктивно синхронный двигатель ничем не отличается от синхронного генератора.
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с магнитным полем полюсов ротора.
При работе синхронной машины в режиме двигателя к статору подводят трехфазный переменный ток, а к обмотке возбуждения ротора — постоянный ток.
Трехфазный переменный ток создает в обмотке статора вращающееся магнитное поле, которое вращается в пространстве со скоростью
![]()
где f— частота переменного тока(гц);
р — число пар полюсов в машине.
Представим себе магнитное поле статора в виде круга с явно выраженными полюсами на нем, вращающегося со скоростью п1об/мин. Эти полюса магнитными силовыми линиями связываются с полюсами ротора противоположной полярности (рис. 212).
Вращающееся магнитное поле увлекает за собой полюса ротора и заставляет их вращаться с такой же скоростью. Скорость вращения ротора, равную скорости вращающегося магнитного поля, называют синхронной скоростью. При нагрузке ротор синхронного двигателя отстает на некоторый угол в от вращающегося магнитного поля, причем с увеличением нагрузки угол в увеличивается (рис. 212,б
Зависимость вращающего момента синхронной машины от угла в представлена на рисунке 213. Кривая имеет вид
с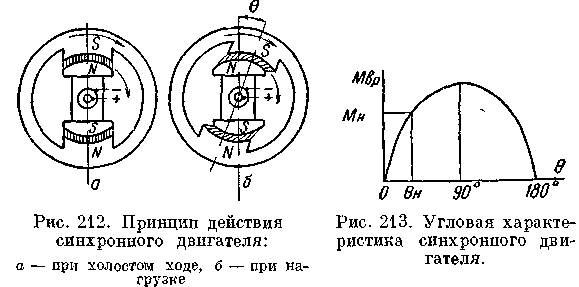
![]() инусоиды.
При поминальной
мощности двигателя угол Q
= 20—30°, при этом перегрузочная
способность двигателя равна-
инусоиды.
При поминальной
мощности двигателя угол Q
= 20—30°, при этом перегрузочная
способность двигателя равна-
![]()
 Вращающий
момент синхронного двигателя
пропорционален
приложенному
напряжению. Ротор вращается с
синхронной
скоростью, не зависящей
от нагрузки, а при увеличении нагрузки
изменяется только угол в.
Вращающий
момент синхронного двигателя
пропорционален
приложенному
напряжению. Ротор вращается с
синхронной
скоростью, не зависящей
от нагрузки, а при увеличении нагрузки
изменяется только угол в.
При вращении ротора магнитный поток полюсов Ф0 пересекает витки обмотки статора и индуктирует в них э. д. с. Е0. Согласно уравнению равновесия э. д. c., приложенное к двигателю напряжение сети Uс уравновешивается суммой обратных э. д. с. двигателя сумм ЕДВ. На основании этого уравнения нарисуем векторную диаграмму синхронного двигателя (рис. 214). Вектор тока I откладываем вертикально. Под углом ф в сторону опережения откладываем вектор напряжения сети Uc. В фазе с вектором тока откладываем векторы магнитного потока якоряФя и потока рассеяния Фрс, каждый из которых индуктирует соответствующие э. д. с.Ея и ЕРС, отстающие от вектора магнитного потока на 90°. Откладываем на векторной диаграмме векторЕя и пристраиваем к нему вектор э. д. с. рассеянияEрс, сумма этих э. д. с. равна падению напряжения на синхронном индуктивном сопротивлении двигателя Хсх
![]()
поэтому, зная хох, можно узнать величину суммы векторовЕя + EРС.
Так как из уравнения равновесия э. д. с. известно, что напряжение сети UС уравновешивается суммой э. д. с. двигателя, то откладываем векторОА, равный и противоположный по направлению вектору напряжения сетиUС, который и будет представлять сумму э. д. с. двигателя суммЕДВ. Вектор противоэ. д. с. двигателяЕ0 определится как третья сторона треугольникаОАВ, где известны стороныОА иОВ. Из этой векторной диаграммы видно, что
![]() )
)
В ектор
напряжения сетиUc
изобразим состоящим из двух составляющих,
каждая из которых уравновешивает
соответствующую обратную э. д. с. В данном
случае составляющая —Е0
уравновешивает э. д. с.Е0,
а составляющаяIхсх уравновешивает
э. д. с.Ея иЕрс.
ектор
напряжения сетиUc
изобразим состоящим из двух составляющих,
каждая из которых уравновешивает
соответствующую обратную э. д. с. В данном
случае составляющая —Е0
уравновешивает э. д. с.Е0,
а составляющаяIхсх уравновешивает
э. д. с.Ея иЕрс.