

TOATS
.pdf1
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
Факультет: «Управление процессами перевозок» Кафедра: «Железнодорожная автоматика, телемеханика и связь»
Курсовая работа
По дисциплине: Теоретические основы автоматики, телемеханики и связи
Выполнил студент:
(фамилия, имя, отчество)
(шифр)
(филиал, город)
4
(курс, группа)
Руководитель:
(фамилия, имя, отчество)
|
|
2 |
СОДЕРЖАНИЕ |
|
|
Введение…………………………………………………………… |
3 стр. |
|
1. |
Исходные данные для курсового проектирования………….. |
4 стр. |
2. |
Описание шаблона модели…………………………………… |
6 стр. |
Список литературы……………………………………………….. |
28 стр. |
|
3
ВВЕДЕНИЕ
Автоматизация процессов управления есть необходимый элемент современного производства. Ее широкое внедрение обеспечивает повышение производительности труда и улучшение качества продукции. Развитие целых отраслей современной науки и техники принципиально невозможно без использования средств автоматизации.
На железнодорожном транспорте, как и во всех отраслях народного хозяйства, широко применяется автоматизация и телемеханизация производственных процессов, и прежде всего процессов управления движением поездов.
Работа систем железнодорожной автоматики и телемеханики проект в сложных эксплуатационных условиях, определяемые скоростями и большой интенсивностью движения поездов, а также часто трудными климатическими условиями. К специфическим условиям работы также относится то, что они, обеспечивая безопасность движения поездов, используют в качестве каналов связи рельсовые цепи и испытывают влияние помех большого уровня от токов электрической тяг и др.
В настоящей курсовой работе выполнено два задания:
-синтез и исследование регулятора скорости движущегося
объекта;
-синтез и исследование кодера и декодера информации.
4
1. Исходные данные для курсового проектирования
Задание:
1. Разработать устройства организации телемеханического канала связи между пунктом управления и объектом управления, осуществить их настройку и исследовать их характеристики. Для этого:
-синтезировать структурные схемы кодирующего и декодирующего устройства для передачи сообщений по телемеханическому каналу в заданном помехозащищенном коде;
-разработать модели канала связи с возможностью имитации ошибок при передаче данных, а также анализатора, для оценки достоверности передачи данных при наличии ошибок;
-рассчитать корректирующие способности заданного помехозащитного кода и оценить достоверность передачи данных при известной вероятности одиночных искажений символов.
2. Для объекта управления с заданными характеристиками разработать структурную схему системы автоматического регулирования замкнутого типа, осуществить её настройку и анализ качества регулирования. Для этого:
-по кривой разгона определить характеристики объекта управления;
-выбрать тип регулятора и настроить его параметры для обеспечения заданных показателей качества переходного процесса,
снять и проанализировать характеристики процесса регулирования.
3.Синтезировать модель передачи установок параметров технологического процесса по заданной программе и получить график процесса регулирования при отсутствии искажений в канале связи;
4.Сформировать перечень технических характеристик разработанной системы.
5.Сформулировать выводы по работе.

5
- используемый для передачи помехозащищенный код:
инверсный код – исправление и обнаружение ошибок.
Вероятность искажения символа – 0,04·10-6.
Характеристики инверсного кода:
-количество различных сообщений – 16;
-общее количество символов в сообщении – 8;
-минимальное кодовое расстояние – 4.
Время моделирования равно – 12.8 сек, максимальный шаг –
0,01сек.
Программа изменения уставок – [2 2 1 1 1 2 2 2 2 2 1 1 1]
Закон изменения возмущения – однополярные прямоугольные импульсы с амплитудой 3 и периодом 0.5.
Тип регулятора – ПИ.
Кривая разгона:
Сведения о параметрах настройки регулятора:
Тип |
Апериодический |
С |
|
20% |
min y 2 dt (с |
40% |
|||||
регулятора |
|
|
|
регулированием |
перерегулированием) |
||||||
|
|
|
|
|
|
|
|
||||
|
K p |
0,6 T0 |
|
K p |
0,7 |
T0 |
|
K p |
T0 |
|
|
ПИ |
K0 0 |
K0 |
0 |
|
K0 |
0 |
|
||||
|
|
|
|
|
|||||||
|
Tир 0,6 T0 |
Tир 0,7 T0 |
Tир T0 |
|
|
||||||
6
2. Описание шаблона модели
С целью упрощения процесса разработки модели системы автоматического регулирования с передачей уставок по телемеханическому каналу связи, студентам предлагается воспользоваться готовым шаблоном. В шаблоне уже разработана общая структура системы. Также в него уже включены модели отдельных общих для всех вариантов узлов, включая ряд вспомогательных, в состав системы автоматического регулирования не входящих, но необходимых для моделирования и автоматизированного сбора сведений о ее работе.
Процесс разработки модели системы автоматического регулирования при использовании данного шаблона заключается в его изучении,
анализе и корректном дополнении моделями отдельных не проработанных узлов.
Модель, представленная в шаблоне, является иерархической,
построенной в соответствии с системным подходом. Результатом такого подхода является то, что реализация многих элементов модели подчиняется «принципу матрешки», когда элемент обозначен в схеме в общем виде на одном уровне описания, а его реализация раскрыта на других уровнях.
Для удобства студента, элементы модели, которые требуется редактировать, а также основные индикаторы выделены цветом и падающей тенью. Для того, чтобы модель заработала необходимо изучить устройство существующих элементов и правильно реализовать структурную схему элементов выделенных цветом и падающей тенью.
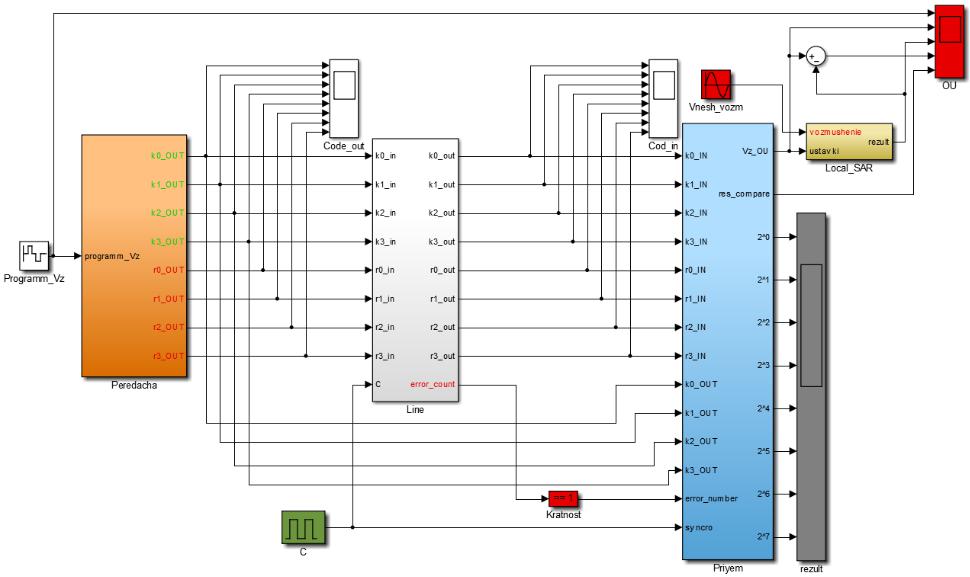
Общий вид системы автоматического регулирования с передачей уставок по телемеханическому каналу связи представлен на рисунке 1.
7
Рис. 1. Общий вид системы автоматического регулирования с передачей уставок по телемеханическому каналу связи
8
На рисунке следует выделить следующие управляющие элементы
иэлементы индикации:
–Управляющие элементы:
Programm_Vz – задатчик, в котором должна быть записана программа изменения уставок во времени;
Peredacha – модель передающей стороны системы телемеханики
(поста управления);
Line – модель канала связи;
Priyem – модель приемной стороны системы телемеханики
(линейного пункта);
Local_SAR – модель локальной системы автоматического регулирования технологического параметра;
Vnesh_vozm – модель внешних возмущений на объект регулирования;
С – генератор тактовых имульсов для автоматического формирования различных ошибок в канале связи;
Kratnost – элемент настройки кратности автоматически подсчитываемых ошибок в канале связи;
– Элементы индикации:
Code_out – индикатор отправляемого передающей стороной в канал связи сообщения в заданном помехозащитном коде;
Code_in – индикатор принятого приемной стороной сообщения в заданном помехозащитном коде;
Result – индикатор подсчитанного количества ошибок заданной элементом Kreatnost кратности в двоичном коде.
OU – осциллограф для отображения процесса регулирования технологического параметра объекта регулирования локальной системой автоматического регулирования.
Примечание: элементы Peredacha, Priyem, Line, Local_SAR
являются блоками, внутренняя реализация которых рассматривается
9
далее. Блоки моделируются элементом Subsystem из панели обозревателя элементов САР среды Simulink.
Взаимодействие элементов модели на данном уровне рассмотрения заключается в следующем. В различные моменты времени находящийся на посту управления программный задатчик Programm_Vz
формирует соответствующие требуемые значения регулируемого технологического параметра Vz. Также размещенный на посту управления блок Peredacha из требуемого значения технологического параметра формирует сообщение в заданном помехозащитном коде для передачи удаленному объекту управления по линии связи, в которой возможны случайные искажения отдельных символов. Моделируемая блоком Line Линия связи в рамках учебной задачи имеет топологию
«точка-точка», то есть подразумевает постоянное монопольное использование её постом управления и одним удаленным пунктом, где размещен объект управления. Кроме того, для удобства моделирования данные передаются параллельным кодом. В процессе передачи сообщения по каналу связи в нем с некоторыми вероятностями могут исказиться отдельные группы символов (разрядов) от одного, до всех,
либо с другой вероятностью сообщение может быть доставлено на удаленный пункт неискаженным. Для удобства изучения влияния искажений на передаваемые сообщения модель линии связи предоставляет возможность детерминированного формирования и перебора всех возможных искажений, которые осуществляются над передаваемым сообщением по сигналам тактового генератора С с периодом 0.1 сек, что позволяет за время моделирования 12.8 сек перечислить все возможные искажения 8-разрядного двоичного числа.
Блок Priyem – представляет собой телемеханическое оборудование, размещенное на удаленном объекте, предназначенное для приема и анализа сообщений из линии связи. Используя в качестве входных сигналов поступающие из канала связи сообщения в заданном
10
помехозащитном коде, блок Priyem должен выполнить обратное преобразование по отношению к тому, что выполняет блок Peredacha, то есть декодировать сообщение и определить сопоставленную ему уставку. Вычисленное значение уставки подается на один из входов локальной системы автоматического регулирования Local_SAR на другой вход которой подаются внешние возмущения Vnesh_vozm,
моделирующие влияние окружающей среды на объект регулирования.
Результаты работы локальной системы автоматического регулирования в условиях влияния окружающей среды и изменения величин уставок,
передаваемых по линии связи отображаются на индикаторе ОU.
Кроме того, в модели присутствует дополнительный индикатор
Result, который служит для отображения в виде эпюр процесса подсчета необнаруженных трансформаций уставок вследствие искажений различной кратности передаваемых по линии связи сообщений.
Кратность подсчитываемых и отображаемых индикатором Result
ошибок, приведших к необнаруженным трансформациям передаваемых по линии связи сообщений, задается блоком Kratnost.
Далее приведем описание блока Peredacha. Модель блока представлена на рисунке 2.