Исходные данные
Для съемки участка местности между двумя пунктами полигонометрии ПП8 и ПП19 проложен теодолитно-высотный ход.
В теодолитно-высотном ходе измерены:
- длины сторон ПП8-I, I-II, II-ПП19;
-
горизонтальные правые по ходу углы
 ,
,
 ,
,
 ,
,
 ;
;
- вертикальные углы между точками хода в прямом и обратном направлениях.
Результаты измерений вертикальных и горизонтальных углов и длин сторон для всех вариантов приведены в таблице 1 и 2.
Дирекционные углы начального направления и конечного направления, а также координаты полигонометрического пункта ПП19 – приняты по таблице 1, по первой букве фамилии и последней цифре учебного шифра:
 ;
;
 ;
;
 ;
;
 .
.
Координаты пункта ПП8 приняты для всех вариантов:
 ,0
,0

Рис. 1 Схема теодолитно-высотного хода съёмочного обоснования
Задание 1 Обработка журнала измерения углов наклона в теодолитно-высотном ходе.
Вычисление
углов наклона между точками хода ПП8 -
I прямой угол наклона
 и точками I - ПП8 обратный угол наклона
и точками I - ПП8 обратный угол наклона
 осуществляется по формулам
осуществляется по формулам
 =Л-МО
=Л-МО
 =МО-П
=МО-П
где JI и П -отчеты по вертикальному углу:
при положении «круг право» - П
При положении «круг лево» - Л
МО - место нуля вертикального круга
МО=(Л+П)/
2 



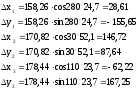
Горизонтальное проложение стороны хода ПП8-I определяется по формуле
S
= D cos
cos Vcp
=158.36
Vcp
=158.36 cos
cos (- 2°05/)
= 158,25
(- 2°05/)
= 158,25
Задание 2 Обработка ведомости вычисления плоских прямоугольных координат точек теодолитно-высотного хода
Уравнивание углов хода
Вычисляется
сумма измеренных углов хода.
измеренных углов хода.

Вычисляется теоретическая сумма углов по формуле
 ,
,
где n=4 - число точек хода.
Вычисляется
угловая невязка f по формуле:
по формуле:

Вычисляется допустимая угловая невязка по формуле:

Если -условие
выполняется, то эту невязку распределяем
с обратным знаком поровну на все углы
хода с округлением до десятых долей
минуты:
-условие
выполняется, то эту невязку распределяем
с обратным знаком поровну на все углы
хода с округлением до десятых долей
минуты:


Контроль
правильности вычисления поправок
 по формуле
по формуле
 -
верно
-
верно
Вычисляется
уравненные значения углов
 по формуле:
по формуле:





Выполняется контроль вычисления


 -
верно
-
верно
Вычисление дирекционных углов сторон хода и приращение координат
Дирекционные углы линии вычисляем по формуле:

где
 -
последующий дирекционный угол
-
последующий дирекционный угол
 -
правый угол в точке n
-
правый угол в точке n
 -
предыдущий дирекционный угол
-
предыдущий дирекционный угол
Вычисляется дирекционные углы, используя данную формулу



Результаты сводим в таблицу 1.
Журнал измерения углов наклона в теодолитно-высотном ходе
таблица 1
|
№ точки хода |
Номер точек визиро-вания |
Положение вертикаль-ного угла |
Отсчёт по вертикальному кругу |
МО=(Л+П)/2 |
Угол наклона
V=МО-П |
Среднее значение угла наклона |
Длина сторо-ны хода |
Горизонтальное прложение |
№ точки хода |
|||||||||
|
˚ |
' |
|
˚ |
' |
˚ |
' |
|
|
|
|||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
||||||
|
пп8 |
пп7 |
л |
-2 |
04 |
-1
|
-2 |
03 |
-2 |
03 |
- |
158,26 |
пп8 |
||||||
|
I |
п |
2 |
02 |
-2 |
03 |
158,36 |
158,6 |
|||||||||||
|
I |
пп8 |
л |
2 |
01 |
-1
|
2 |
02 |
2 |
02 |
I |
||||||||
|
|
п |
-2 |
03 |
2 |
02 |
170,88 |
170,82 |
|||||||||||
|
|
л |
1 |
34 |
-1
|
1 |
35 |
1 |
35 |
||||||||||
|
II |
п |
-1 |
36 |
1 |
35 |
|||||||||||||
|
II |
I |
л |
-1 |
35 |
-1 |
1 |
34 |
-1 |
34 |
II |
||||||||
|
|
п |
1 |
33 |
-1 |
34 |
178,44 |
178,44 |
|||||||||||
|
|
л |
-0 |
02 |
-1 |
-0 |
03 |
-0 |
03 |
||||||||||
|
пп19 |
п |
0 |
0 |
-0 |
03 |
|||||||||||||
|
пп19 |
II |
л |
0 |
01 |
-1 |
0 |
02 |
0 |
02 |
пп19 |
||||||||
|
пп20 |
п |
-0 |
03 |
0 |
02 |
|||||||||||||
Сумма вычисленных углов проверяются с суммой теоретических уклонов. Контроль вычисления дирекционных углов выполняется по уравненным дирекционным углам.

 вычисленное
равно
вычисленное
равно
 заданному
заданному
 Расчеты верны.
Расчеты верны.
Вычисляются приращения координат между пунктами хода по формулам: