

3.2.5. Мостовые схемы
Широкое применение мостовых схем объясняется:
- высокой точностью измерений,
- большой чувствительностью и
- возможностью измерения различных параметров электрических цепей (R, L, С); величин, функционально с ними связанных (частоты, фазового угла) и ряда неэлектрических величин (температуры, давления, перемещений, усилий и т.д.).
3.2.5.1. Мосты постоянного тока
Наиболее точные измерения сопротивлений R постоянному току выполняются с помощью мостов постоянного тока.
Эти мосты делятся на две группы:
- одинарные (четырехплечие) и
- двойные (шестиплечие).
Одинарный мост, называемый мостом Уитстона, применяют для измерения сопротивлений от 1 Ом до 100 МОм; двойной мост, называемый мостом Томпсона, - для измерения малых величин сопротивлений - от 1 Ом и менее.
В двойном мосте влияние величин, вызывающих погрешность измерения, сведено к минимуму.
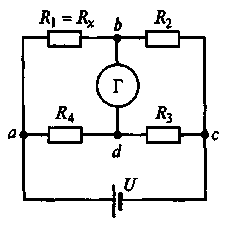
Рис. Схема одинарного моста постоянного тока
Одинарный мост (рисунок) состоит из четырех плеч: аb, bс, сd и dа.
Три известных регулируемых сопротивления R2, R3 и R4 вместе с измеряемым сопротивлением R1 = Rх образуют замкнутый четырехполюсник аbсd.
В измерительную диагональ моста bd включен указатель равновесия Г, в качестве которого используется магнитоэлектрический гальванометр.
В диагональ питания моста ас включается источник постоянного тока - аккумуляторная батарея или сухой элемент.
Подбором значений сопротивлений R2, R3, R4 добиваются отсутствия тока через гальванометр (потенциалы точек b и d равны) и, следовательно,
IxRx = I4R4, I2R2 = I3R3.
Поскольку в момент равновесия моста ток через гальванометр не протекает (Iг = 0), то Ix = I2 и I3 = I4.
Тогда правомерно записать
Rх/R2 = R4/R3 или RxR3 = R2R4,
откуда сопротивление
Rx = R2R4/R3. (1)
Сопротивления R2 и R3 - известные фиксированные сопротивления в диапазоне 1... 1000 Ом.
При этом отношение R2/R3 = 10 - 3... 10 3.
Регулировкой сопротивления R4 уравновешивают мост.
Погрешности измерения с помощью мостов постоянного тока зависят от диапазона измеряемых сопротивлений; наименьшие погрешности получают в диапазоне 100 Ом ... 100 кОм.
По мере увеличения измеряемого сопротивления уменьшается чувствительность мостов, а при измерении больших сопротивлений сказывается влияние сопротивления изоляции.
Нижний предел измеряемых сопротивлений ограничен тем, что при измерении малых сопротивлений сказывается влияние сопротивления монтажных проводов и переходных контактов.
Эти погрешности исключаются в двойном мосте (рисунок), в котором используются резисторы R3 и R4, чтобы исключить влияние сопротивления соединительного проводника.
Мост называется двойным, так как он содержит два комплекта плеч отношения.
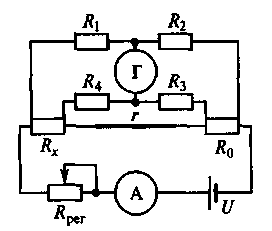
Рис. Схема двойного моста постоянного тока
При равновесии моста сопротивление Rх определяется выражением
![]() (2)
(2)
На практике значения R1, R2, R3 и R4 выбирают такими, чтобы выполнялось соотношение
R1/R2 = R3/R4. (3)
При этих условиях вторым членом (2) можно пренебречь. Чтобы проверить выполнение условия (3), мост уравновешивается, а затем проводник r убирается, что не должно влиять на равновесие моста.
Следовательно, двойной мост компенсирует малое сопротивление r.
На практике для исключения влияния соединительных проводов сопротивление резисторов R1, R2, R3 и R4 выбирают более 10 Ом, а сопротивления Rx и R0 имеют токовые и потенциальные зажимы и примерно один порядок величины.
Чтобы исключить влияние термо-ЭДС, берут два отсчета при разных полярностях батареи, а затем усредняют результат.
В качестве нуль-индикаторов в мостах постоянного тока применяют высокочувствительные гальванометры или электронные устройства.
Двойной мост обеспечивает погрешность менее 0,05 % для сопротивлений в диапазоне 10 - 6...1 Ом.