Контрольные задания для курсового проекта по дисциплине «Теория механизмов и машин» 151000 – Технологические машины и оборудование. Варианты задания выбираются по списочному номеру группы Вариант 12
Задание №1
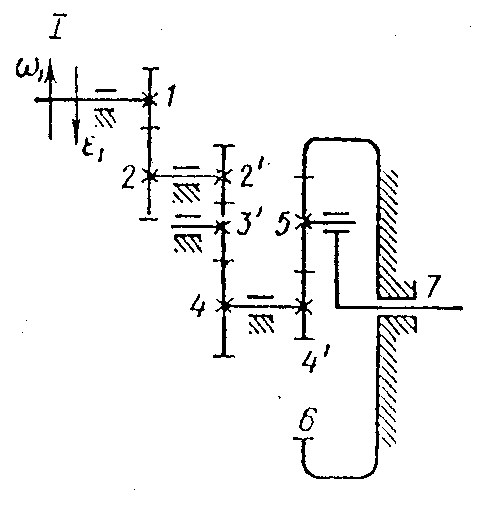
На рис.1-Х показаны схемы зубчатых передач. Входное колесо 1 в данный момент имеет угловую скорость ω₁ и постоянное угловое ускорение ɛ₁, направленное по движению или против движения. Определить:
1.передаточное отношение между входным и выходным звеньями и его знак (если их оси вращения параллельны);
2. угловую скорость и угловое ускорение выходного звена, их направление показать на схеме передачи;
3. время, в течение которого угловая скорость увеличится в два раза (если движение ускоренное), или уменьшится до нуля (если движение замедленное)
4. общи коэффициент полезного действия передачи.
В таблице заданных величин z-число зубьев колес приводится с индексом, соответствующим их номеру на схеме механизма, для червяка z-число заходов, а направление витков червяка указано буквами: л - левое, п – правое.
Для
расчетов принять следующее значение
КПД (учитывающего потери и в зацепление,
и в подшипниках): для пары цилиндрических
колес
 =0,97;
для пары конических колес
=0,97;
для пары конических колес
 =0,95;
для планетарной передачи с внешним
зацеплением ее колес
=0,95;
для планетарной передачи с внешним
зацеплением ее колес
 =0,5,
а для имеющей внутреннее зацепление
одной из пар
=0,5,
а для имеющей внутреннее зацепление
одной из пар
 =0,96;
для червячной передачи при одно-, двух-
и трехзаходном червяке – соответственно
=0,96;
для червячной передачи при одно-, двух-
и трехзаходном червяке – соответственно
 =0,7;0,75;0,8.
=0,7;0,75;0,8.
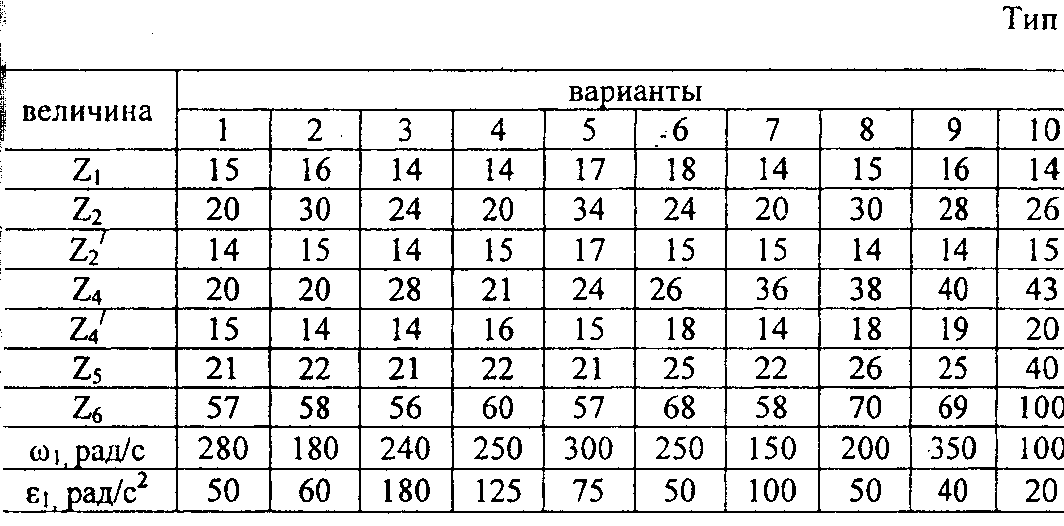
Вариант 12
Задача 1, Схема 1, Данные 2
Исходные данные
z₁=16
z₂=30
zʹ₂=15
z₄=20
zʹ₄=14
z₅=22
z₆=58
ω₁=180
ɛ₁=60
Решение.
На схеме 3 ступени:
Зубчатая цилиндрическая с внешним зацеплением (1 и 2)
Зубчатая цилиндрическая с внешним зацеплением(2ʹ ,3ʹ и 4)
Планетарная передача (4 ,4ʹ,5 и 7)
Находим передаточное отношение механизма.
Зубчатая цилиндрическая с внешним зацеплением
U₁=z₂/z₁=30/16=1.875
Зубчатая цилиндрическая с внешним зацеплением
U₂= (zʹ₃/zʹ₂)∙(z₄ ∙zʹ₃)= z₄/ zʹ₂=20/15=1.33
Планетарная передача
U₃=1-( z₆/ zʹ₄)=1-(58/14)=3.14
1.4. Общее передаточное отношение:
U= U₁∙ U₂ ∙U₃=1.875∙1.33∙3.14=7.84
Угловая скорость ведомого звена:
 =
ω₁/U=180/7.84=23
=
ω₁/U=180/7.84=23
Угловое ускорение:
 =
ɛ₁/U=60/7.84=7.66
=
ɛ₁/U=60/7.84=7.66
3.движение
замедленное . До остановки движения
,т.е
 =0
=0
t= / =23/7.66=3c
4 Общий КПД
η= ∙
∙ ∙
∙ =0.97∙
=0.97∙ ∙0.96=0.876
∙0.96=0.876
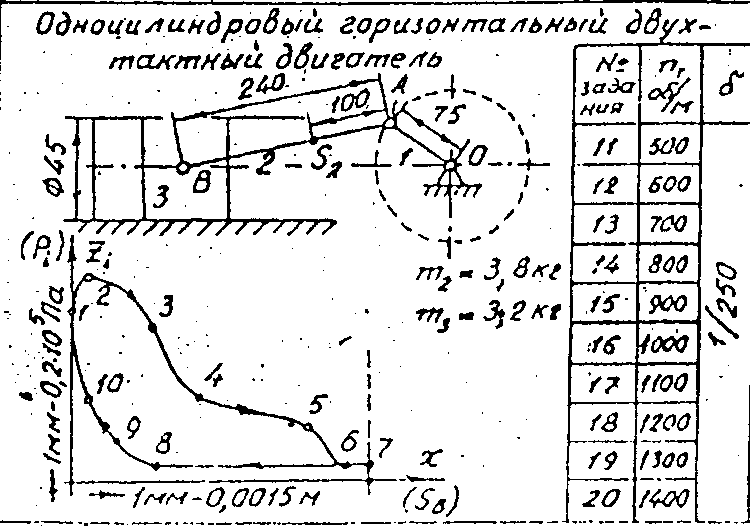
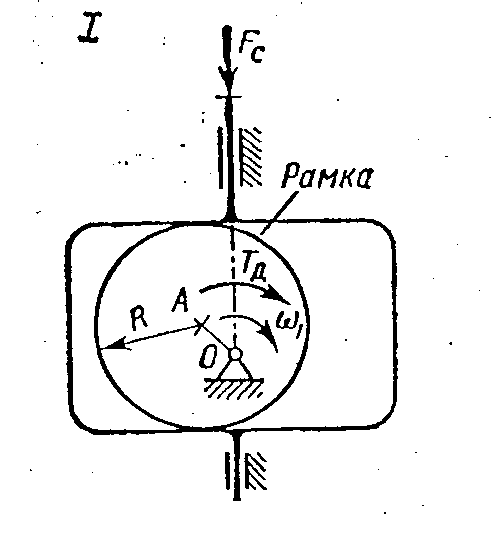
Задание №2
Выходное
звено механизма, показанного на рис.5,
1-Х, совершает обратно -поступательное
(или возвратно-вращательное) движение
и направлено на рабочем ходу постоянной
 (или моментом
(или моментом
 )
полезно-вредные сопротивления. На
холостом ходу, при обратном направлении
движения одного звена, полезное
сопротивление отсутствует, но продолжают
участвовать вредные сопротивления.
Учитывая трение в кинематических
энергиях
и,
зная КПД η механизма определить:
)
полезно-вредные сопротивления. На
холостом ходу, при обратном направлении
движения одного звена, полезное
сопротивление отсутствует, но продолжают
участвовать вредные сопротивления.
Учитывая трение в кинематических
энергиях
и,
зная КПД η механизма определить:
Движущий
момент
 постоянный по величине, который нужно
приложить к входному звену при
установившемся движении с циклом,
состоящем из рабочего и холостого ходов;
постоянный по величине, который нужно
приложить к входному звену при
установившемся движении с циклом,
состоящем из рабочего и холостого ходов;
Работа сил трения на рабочем и холостом ходах, считая, что вредное сопротивление постоянно на каждом из ходов, но на рабочем оно в три раза больше чем на холостом.
Изменение кинетической энергии механизма за время рабочего и за время холостого хода.
Мощность требуемую от привода при вращении выходного звена со средней скоростью ω₁ и средние (за целый оборот) мощность полезного сопротивления и мощности сил трения.
Решение задачи основано на уравнении движения механизма устанавливающем связь между изменением кинетической энергии и работами (законе кинетической энергии). Работами сил и моментов определяется соответственно по линейным или угловым перемещениям звеньев, на конечные они действуют, для чего нужно найти положения механизма при различных положениях выходного звена. Перемещение звеньев, линейные и круговые, можно определить по чертежу, выполненному в масштабе, или считать аналитически. Чтобы определить зоны время рабочего холостого хода для входного звена нужно учитывать связь движения с показанным направлением действия полезного сопротивления, которое на разном ходу должно препятствовать движению выходного звена. Размеры звеньев согласно их обозначению на схеме механизма, и другие необходимые величины приведены в таблицах числовых данных, где η- коэффициент полезного действия, а в варианте 4-m- модуль расчетного зацепления, z –число зубьев колеса. В Вариантах 5 и 1 применено геометрическое замыкание звеньев в высшей паре, предупреждающее отход звеньев друг от друга: в варианте 5 ролик радиус r перекатывается в
круговом пазу, в варианте 1 круглый эксцентрик охвачен рамкой выходного звена.
Примечание. Сначала необходимо построить механизм в крайних положениях и по заданным направлениям угловой скорости входного звена ω₁ и постоянной силы (или момента ) полезного сопротивления установить рабочие и холостые ходы.
С этого чертежа при графическом определении линейных и угловых перемещений звеньев необходимо снять:
1.для
входного звена его углы поворота на
рабочем ходу
 и на холостом ходу
и на холостом ходу
 .
.
2.для
выходного звена при его возвратно
поступательном движении линейное
перемещение, т.е. ход S,
или его возвратно-вращательном движении
угол размаха

ВЕЛИЧИНА |
ВАРИАНТЫ |
||||||||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||||||||
R, мм |
40 |
45 |
20 |
50 |
42 |
25 |
30 |
20 |
15 |
35 |
|||||||
ОА, мм |
18 |
20 |
10 |
20 |
20 |
15 |
18 |
14 |
7 |
22 |
|||||||
η |
0,81 |
0,72 |
0,82 |
0,84 |
0,80 |
0,85 |
0,83 |
0,80 |
0,81 |
0,80 |
|||||||
, H |
55 |
80 |
50 |
100 |
90 |
60 |
65 |
45 |
30 |
70 |
|||||||
ω₁,рад/с |
80 |
90 |
100 |
80 |
90 |
110 |
180 |
120 |
140 |
70 |
|||||||
Задача 2,схема 1, Данные 2
Исходные данные:
R=45 мм
ОА=20 мм
η=0.72
=80H
ω₁=90
Решение :
1)Рабочий и холостой ход для входного звена и выходного. Разсности наибольшего и наименьшего удаления от точки О .
Для входного звена :
S=(R+OA)-(R-OA)=(45+20)-(45-20)=40mm
2)Весь цикл работы входного звена
+ =2
=2
= = =3.14
3)определение движущего момента
ɳ=( ∙S)/
∙S)/ ∙
),
∙
),
 =(
∙S)/
=(
∙S)/ ∙
ɳ)=(80∙40)/(3.14∙0.72)=1415.4 H∙mm
∙
ɳ)=(80∙40)/(3.14∙0.72)=1415.4 H∙mm
4) Работа сил трения на рабочем и холостом ходе.
 =3
=3
ɳ=1-
/ )=1-
/
)=1-
/ ∙
∙ ))
))
 =(1-
ɳ)∙
∙
=(1-0.72)∙1415.4∙3.14=1244
H∙mm
=(1-
ɳ)∙
∙
=(1-0.72)∙1415.4∙3.14=1244
H∙mm
Работа сил трения на холостом ходу в 3 раза меньше
=1/3∙1244.44=414.8H∙mm
5)изменение кинетической энергии механизма за время рабочего и холостого хода
 =
= -
- -
=0
-
=0
= -
=0
-
=0
=4444.356-3200 -1244=0
= - = 4444.356-414.8=4029.6 Дж
6)Мощность требуема от привода
 =
∙
ω=1415.4∙90=127.386
=
∙
ω=1415.4∙90=127.386
t=2 / ω₁=2∙3.14/90=0.07 c
 =
= =3200/0.07=45.9
Вт
=3200/0.07=45.9
Вт
 =
+
)=(244+414.8)/0.07=23.8
Вт
=
+
)=(244+414.8)/0.07=23.8
Вт
Задание № 3
Исследование эвольвентного зацепления (проектирование зубчатой передачи из условия получения на меньших ее габаритов и определение некоторых характеристик этой передачи)
№ задания |
Передаточное
число
|
Модуль зацепления m,мм |
Масштаб |
Скорость колеса 1 n, об/мин |
Примечание |
1 |
1,00 |
3 |
10:1 |
2850 |
Обработка
копированием
|
2 |
1,08 |
“ |
“ |
“ |
|
3 |
1,15 |
“ |
“ |
“ |
|
4 |
1,23 |
“ |
“ |
“ |
|
5 |
1,29 |
“ |
“ |
“ |
|
6 |
1,36 |
“ |
“ |
“ |
|
7 |
1,43 |
“ |
“ |
“ |
|
8 |
1,50 |
“ |
“ |
“ |
|
9 |
1,57 |
“ |
“ |
“ |
|
10 |
1,64 |
5,5 |
5:1 |
1450 |
|
11 |
1,72 |
“ |
“ |
“ |
|
12 |
1,79 |
“ |
“ |
“ |
|
13 |
1,94 |
4,5 |
“ |
“ |
|
14 |
2,00 |
“ |
“ |
“ |
|
15 |
2,07 |
“ |
“ |
“ |
|
16 |
2,13 |
“ |
“ |
“ |
|
17 |
2,20 |
“ |
“ |
“ |
 =
=
 ,
,
 =m,
=m,
 =1,25m,
зацепление внешнее
=1,25m,
зацепление внешнее
Задача 3,Данные 12
Исходные данные:
U₁₂=1,79 передаточное отношение
m=5.5 мм модуль зацепления
n₁=1450
 скорость
вращения колеса 1
скорость
вращения колеса 1
 =20
=20 угол зацепления, обработка копированием,
зацепление внешнее
угол зацепления, обработка копированием,
зацепление внешнее
=m₁ высота головки зуба
 =1,25
m
высота ножки
=1,25
m
высота ножки
Масштаб 5:1
1.Определяем число зубьев колес
При нарезании колес копированием, при этом подрезание зубьев исключается .Подбор зубьев для шестеренки и колеса
Минимально
допускаемое число зубьев меньшего
колеса
 =17
=17
 =
= U
U
z₁ |
17 |
18 |
19 |
|
30.41 |
32.22 |
34.01 |
Принимаем
 =19.
=19.
Принимаем z₂=34 -ближайшее целое число
2. Формулы для расчета основных размеров зубчатого зацепления.
2.1. Диаметры делительные:
Шестерни
 =
m
=
m =5.5∙19=104.5
=5.5∙19=104.5Колеса
 =
m
=
m =5.5∙34=187
=5.5∙34=187
2.2. Высота головки зуба =m=5.5 мм
2.3. Высота ножки зуба =1,25m= 1.25∙5.5=6.875 мм
2.4. Диаметры окружностей вершин зубьев:
Шестерни:
 =d₁+2
=104.5+2∙5.5=115.
5мм
=d₁+2
=104.5+2∙5.5=115.
5ммКолеса:
 =d₂+2
=187+2∙5.5=198
мм
=d₂+2
=187+2∙5.5=198
мм
2.5. Диаметры окружностей впадин:
Шестерни:
 =d₁
- 2
=104.5-2∙6.875=90.75
мм
=d₁
- 2
=104.5-2∙6.875=90.75
ммКолеса:
 =d₂
-
=d₂
-
 =187-2∙6.875=173.25
мм
=187-2∙6.875=173.25
мм
2.6.
Окружной шаг:
 =
m=5.5∙3.14
=17.27
мм
=
m=5.5∙3.14
=17.27
мм
2.7. Толщина зуба по делительной окружности:
 0.49∙17.27=8.46
мм
0.49∙17.27=8.46
мм
2.8.
Ширина впадин:
 =
=
 =0.51∙17.27=8.81
мм
=0.51∙17.27=8.81
мм
2.9. Диаметры начальных окружностей:
Шестерни
 =d₁
=d₁
 cos
cos =104.5∙0.94=98
=104.5∙0.94=98Колеса
 =
= cos
=187∙0.94=175.6
cos
=187∙0.94=175.6
2.10. Угловая скорость шестерни:
ω₁=
2.11. Межосевое расстояние:
 =145.75
мм
=145.75
мм
2.12. Частота вращения колеса:
2.13. Угловая скорость колеса:
Определим замером по чертежу АВ=27 мм
2.14. Определим замером по чертежу АВ=27 мм
Находим коэффициент перекрытия:
 =
=
2.15. Окружная скорость:
 =
= =
=
Данные расчетов заносим в таблицу
Параметр |
Единицы измерения |
Единицы измерения |
шестерня |
колесо |
Межосевое расстояние |
|
мм |
145.75 |
|
Модуль зацепления |
m |
мм |
5.5 |
|
Передаточное отношение |
U |
- |
1.79 |
|
Высота головки зубы |
|
мм |
5.5 |
|
Высота ножки зуба |
|
мм |
6.875 |
|
Высота зуба |
h |
мм |
12.375 |
|
Окружной шаг |
|
мм |
17.27 |
|
Толщина зуба |
|
мм |
8.46 |
|
Ширина впадины |
|
мм |
8.81 |
|
Число зубьев |
z |
- |
19 |
34 |
Диаметр делительный |
d |
мм |
104.5 |
187 |
Диаметры Вершины зубьев |
|
мм |
115.5 |
198 |
Диаметр впадин |
|
мм |
90.75 |
173.25 |
Диаметр начальных окружностей |
|
мм |
98 |
175.6 |






Задание №4
Плоский
механизм состоит из стержней 1-4 и ползуна
В, соединенных друг с другом и с
неподвижными опорами О₁
и О₂
шарнирами (рис.К2.0-К2.9). Длины стрежней:
l₁=0,4м,
l₂=1,2м,
l₃=1,4м,
l₄=0,8м.
Положение механизма определяется углами
,
 ,
,
 ,
,
 ,
,
 ,
которые вместе с другими величинами
заданы в табл.К2. Точка D
на всех рисунках и точка К на рис.К2.7-К2.9
в середине соответствующего стержня.
Определить величины, указанные в таблице
«Найти». Найти также ускорение
,
которые вместе с другими величинами
заданы в табл.К2. Точка D
на всех рисунках и точка К на рис.К2.7-К2.9
в середине соответствующего стержня.
Определить величины, указанные в таблице
«Найти». Найти также ускорение
 точки А стержня 1, если стержня 1 имеет
в данный момент времени углового
ускорения
точки А стержня 1, если стержня 1 имеет
в данный момент времени углового
ускорения
 =10
с⁻²
=10
с⁻²
Таблица К2
Условия |
Углы |
Дано |
Найти |
|||||||
|
|
|
|
|
1/с |
1/с |
м/с |
|||
0 |
30 |
150 |
120 |
0 |
60 |
10 |
- |
- |
|
|
1 |
60 |
60 |
60 |
90 |
120 |
- |
10 |
- |
|
|
2 |
0 |
120 |
120 |
0 |
60 |
- |
- |
10 |
|
|
3 |
90 |
120 |
90 |
90 |
60 |
10 |
- |
- |
, , |
|
4 |
0 |
150 |
30 |
0 |
60 |
- |
10 |
- |
|
|
5 |
60 |
150 |
120 |
90 |
30 |
- |
- |
10 |
,
,
|
|
6 |
30 |
120 |
30 |
0 |
60 |
10 |
- |
- |
|
|
7 |
90 |
150 |
120 |
90 |
30 |
- |
10 |
- |
, , |
|
8 |
0 |
60 |
30 |
0 |
120 |
- |
- |
10 |
,
,
|
|
9 |
30 |
120 |
120 |
0 |
60 |
10 |
- |
- |
,
,
|
|








 ,
,
 ,
,

 ,
,
 ,
,

 ,
, ,
,
 ,
,
 ,
,

 ,
,
,
,

 ₃
₃
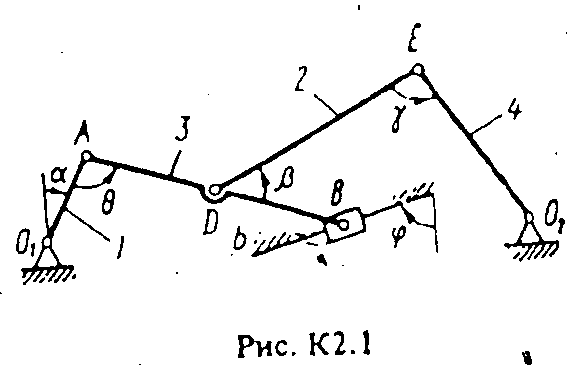
Задача 4, Схема 1, Данные 2
Исходные данные:
=60
=60
=60
=90
=120
=10 рад/c
ɛ₁=10
Определить: ,
,
 ,
,
Решение:
 ⊥
⊥  Е
Е
= ∙
∙
 ₄=10∙0.8=8м/c
₄=10∙0.8=8м/c
Проектируем
на ось х
и

Находим скорость т.Д
⊥D
Находим скорость т.A
⊥A
Находим скорость т.В
 ⊥B
⊥B
Угловая скорость звена 2
=
/E =0
=0
E =0
Тангенциальное
ускорение т.А:
 =ɛ₁∙
=ɛ₁∙ =10∙0,4=4
м/с²
=10∙0,4=4
м/с²
⊥ →
=0
→
=0
Ответы:
=8м/c,
=0,
:
 =4
м/с²,
=4
м/с², ,
=0,
=0
,
=0,
=0
Векторы ускорения показаны на схеме механизма.
Схема механизма
Задание 6
Построить схему механизма и показать на ней 24 положения кривошипа и соответствующие им положения поршня.
Построить график скорости и ускорения поршня.