

лекции сапр петраков / Приложение 2
.docПриложение 2
Меры погрешности решения
Пусть x* - вычисленное решение СЛАУ Ax=b.
Существуют две общеупотребительные меры погрешности в х*:
вектор ошибки
е = х - х* (1)
и невязка
r = b - Ax* = A(x - x*) = Ae (2)
Невязка – это количественная мера несоответствия между правыми и левыми частями уравнений системы при подстановке в них вычисленного решения. Теория матриц говорит, что при невырожденной матрице А из равенства нулю ошибки следует равенство нулю невязки и наоборот. Но эти два вектора не обязаны быть «малы» одновременно.
Таким образом, вычисленное решение может «почти удовлетворять» уравнениям, но совсем не походить на подлинное решение.
Квадратная матрица A называется вырожденной, если ее определитель равен нулю: det(A)=0.
Если матрица А почти вырождена (т. е. если малым изменением уравнений систему можно сделать вырожденной), то, даже при игнорировании ошибок округления, ничтожные возмущения коэффициентов системы могут приводить к большим изменениям решения. Поэтому для таких систем уравнений нереалистично рассчитывать на то, что х* будет хорошим приближенным решением. Если известно, что матрица далека от вырожденности, то и невязка, и ошибка будут достаточно малы.
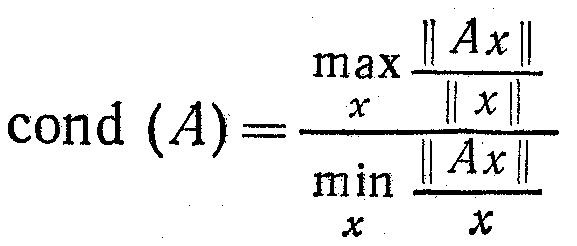
Обусловленность матрицы
Обусловленность – это внутреннее свойство матрицы, не связанное с тем, как именно решается система уравнений. Число обусловленности определяется отношением:
![]() ,
(3)
,
(3)
где
![]() и
и
![]() -
максимальное и минимальное собственные
значения.
-
максимальное и минимальное собственные
значения.
Проиллюстрируем физический смысл собственных значений на следующем примере.
П ример.
Рассмотрим резистивную схему рис. 1а
ример.
Рассмотрим резистивную схему рис. 1а


Y1 Y1`
E E E Y1``
1 Y2 1 2
Y2` Y2``
2
Y3
a б в
Рис. 1. Резистивные схемы: a) исходная; б) преобразованная для первого узла;
в) преобразованная для второго узла.
Получим ММС схемы МУПом:

Преобразуем
указанную схему к виду рис. 1б., объединив
Y2
и
Y3,
так что
![]() ,
тогда ММС примет вид
,
тогда ММС примет вид
|
![]() |*|
φ1
| =
|*|
φ1
| =
![]() .
.
Преобразуем схему к виду рис. 1в, аналогично объединив Y1 и Y2. ММС примет вид
|
![]() |*|φ2|
=
|*|φ2|
=
![]() .
.
Объединив эти уравнения, получим ММС схемы рис. 1а в виде
 (4)
(4)
Здесь ненулевые элементы матрицы расположены только по главной диагонали.
Известно,
что в этом случае элементы
![]() и
и
![]() являются
собственными значениями исходной
матрицы
являются
собственными значениями исходной
матрицы .
.
Легко видеть, что решение системы (4) тривиально, но нетривиальна задача нахождения собственных значений.
Собственные значения для линейных резистивных схем – это собственные проводимости. При анализе переходных процессов собственные значения – это собственные постоянные времени. При частотном анализе – это собственные частоты.
Число cond(A) измеряет, насколько близка к вырожденной матрица А, и насколько чувствительно решение системы Ax=b к изменениям в А и b. Коэффициенты матрицы и правой части системы линейных уравнений редко бывают известны точно. Некоторые системы возникают из эксперимента, и тогда коэффициенты подвержены ошибкам наблюдения. Коэффициенты других систем записываются формулами, что влечет ошибки округлений при их вычислении. Даже если систему можно точно записать в память машины, в ходе ее решения почти неизбежно будут сделаны ошибки округлений. Можно показать, что ошибки округлений в гауссовом исключении имеют то же влияние на ответ, что и ошибки в исходных коэффициентах.
Чтобы уяснить себе смысл числа обусловленности, уточним представление о «почти вырожденности». Если А - вырожденная матрица, то для некоторых b решение х не существует, тогда как для других b оно будет неединственным. Если матрица А почти вырождена, то можно ожидать, что малые изменения в А и b вызовут очень большие изменения в х. С другой стороны, если А - единичная матрица, то b и х - один и тот же вектор. Следовательно, если матрица А близка к единичной, то малые изменения в А и b должны повлечь за собой соответственно малые изменения в х.
Чтобы получить более точную и надежную меру близости к вырожденности, потребуется ввести понятие нормы вектора. Норма — это число, которое измеряет общий уровень элементов вектора. Наиболее употребительной векторной нормой является евклидова длина:
 .
.
Однако использование этой нормы сделало бы слишком трудоемкими некоторые из вычислений. Вместо нее мы определим норму вектора из п компонент следующим образом:

Эта норма обладает многими из аналитических свойств евклидовой длины, именно:
||х|| > 0, если х ≠ 0
||0||=0,
||сх|| = |с|*||х|| для всех скаляров с,
||х+у||≤||x||+||y||.
Умножение вектора х на матрицу А приводит к новому вектору Ах, норма которого может очень отличаться от нормы вектора х. Это изменение нормы прямо связано с той чувствительностью, которую мы хотим измерять. Область возможных изменений можно задать двумя числами:

Максимум и минимум берутся по всем ненулевым векторам. Заметим, что если матрица А вырождена, то т = 0. Отношение М/т является числом обусловленности матрицы А:
Рассмотрим систему уравнений
Ах = b (5)
и другую систему, полученную изменением правой части:
А(х + ∆х) = b + ∆b. (6)
Будем считать ∆b ошибкой в b, а ∆х – соответствующей ошибкой в х, хотя нет необходимости предполагать, что ошибки малы. Поскольку А (∆х) = ∆b, то определения Миm немедленно ведут к неравенствам:
||b|| ≤ M||x||
||b|| ≥ m||∆x||
Следовательно, при М ≠ 0
![]()
Величина ||∆b||/||b|| есть относительное изменение правой части, а величина ||∆х||/||х|| - относительная ошибка, вызванная этим изменением. Использование относительных изменений имеет то преимущество, что они безразмерны, т.е. нечувствительны к общим масштабирующим множителям.
Полученное неравенство показывает, что число обусловленности выполняет роль коэффициента увеличения относительной ошибки. Изменения правой части могут повлечь за собой изменения в решении, большие в cond (A) раз. Оказывается, что то же самое справедливо и в отношении изменений в коэффициентах матрицы.
Некоторые из основных свойств числа обусловленности выводятся просто. Ясно, что М≥m и потому
cond (A) ≥ 1.
Если Р - матрица перестановки, то компоненты вектора Рх отличаются от компонент вектора х лишь порядком. Отсюда следует, что ||Рх|| = ||х|| для всех х и, значит,
cond(P) = l.
В частности, cond(I)=1. Если А умножается на скаляр с, то и М, и т умножаются на модуль этого скаляра, так что
cond(сA)=cond(A).
Если D - диагональная матрица, то
![]()
Так, для матрицы

Имеем М = 5 и m = 1, поэтому cond(D) = 5/1 = 5.
Последние два свойства в известной мере объясняют, почему cond (A) является лучшей мерой близости к вырожденности, чем определитель матрицы А. В качестве крайнего примера рассмотрим диагональную матрицу порядка 100 с числом 0.1 на главной диагонали. Тогда det(A) = 10 -100, что обычно считается малым числом. Но cond(A)=1, и компоненты вектора Ах отличаются от соответствующих компонент вектора х лишь множителем 0.1. Для линейных систем уравнений такая матрица А ведет себя скорее как единичная, а не как вырожденная.
Проиллюстрируем понятие числа обусловленности следующим примером.
Пример 1. Пусть
А=
 ,
b=
,
b=
![]() ,
,
тогда x=
![]() ,
,
![]() =13.8
=13.8
![]() =1.
=1.
Если заменить правую часть системы на:
b′=
![]() ,
,
то решением будет вектор
x′=
![]() .
.
Пусть ∆b=b-b′ и ∆x=x-x′. Тогда
![]() =0.01,
=0.01,
![]() =1.63.
=1.63.
Очень малое возмущение, внесенное нами в b, совершенно изменило x. Действительно, относительные изменения равны
![]() =0.0007246,
=0.0007246,
![]() =1.63.
=1.63.
Так как cond(A) характеризует максимальное возможное увеличение, то
![]() .
.
На самом деле выбранные b и ∆b как раз и дают максимум, так что для этого примера
![]()
Предположим, что мы хотим решить систему, в которой а1,1 = 0.1, а все остальные элементы в А и b - целые числа, и cond (A) = 105. Предположим далее, что у нас двоичный компьютер с 24 битами для дробной части числа и что мы каким-то образом умеем вычислять точное решение для системы, уже записанной в память машины. Тогда единственная ошибка будет связана с двоичным представлением числа 0.1, и тем не менее можно ожидать, что
![]()
Другими словами, простой акт записи матрицы коэффициентов в машине может вызвать изменения в третьей значащей цифре компонент правильного решения. Мы можем подытожить сказанное следующим практическим правилом: при решении системы линейных уравнений относительная погрешность решения пропорциональна относительным погрешностям матрицы коэффициентов системы и ее правой части, причем константа пропорциональности равна числу обусловленности.
Основной результат в исследовании ошибок округления в гауссовом исключении принадлежит Дж. X. Уилкинсону. Он доказал, что вычисленное решение х* точно удовлетворяет системе
(А + Е)х* = b,
где Е- матрица, элементы которой имеют величину порядка ошибок округления в элементах матрицы А. Тем самым все ошибки округления могут быть слиты воедино и рассматриваться как единственное возмущение, внесенное в матрицу в момент ее записи в память компьютера; само же исключение осуществляется без ошибок. Поскольку запись почти любой матрицы в память сопровождается возмущениями, сравнимыми с Е, то свойство метода Гаусса - это лучшее, что можно сказать о каком-либо алгоритме решения линейных уравнений. В этом смысле гауссово исключение представляет собой идеальный алгоритм решения системы Ах = b.