

§ 5. Связь решений неоднородной и однородной систем уравнений.
Если
мы говорим о связи решений неоднородной
и однородной систем линейных уравнений,
то только в том случае, когда однородная
система уравнений соответствует
неоднородной. Это соответствие
устанавливается очень просто: нужно в
заданной неоднородной системе уравнений
(3) заменить нулями все свободные члены:
![]() =0,
=0,![]() .
Полученную таким образом однородную
систему уравнений (4) называют приведённой:
.
Полученную таким образом однородную
систему уравнений (4) называют приведённой:
(3)=
 →
→  = (4).
= (4).
Взаимные свойства заданной и приведённой систем уравнений легко усматриваются:
1). Разность любых двух решений заданной системы уравнений есть решение приведённой системы уравнений.
2). Найдя одно решение системы линейных неоднородных уравнений, и складывая его с каждым из решений приведенной системы, получим все решения заданной системы:
![]() =
=![]() +
+![]() +
+![]() +...+
+...+![]() ,
(5)
,
(5)
где
![]() – некоторое частное решение заданной
системы,
– некоторое частное решение заданной
системы,
![]() ,
,![]() ,...,
,...,![]() – векторы-решения ФСР приведенной
системы (4),
– векторы-решения ФСР приведенной
системы (4),
![]() –
ранг матрицы системы (3),
–
ранг матрицы системы (3),
![]() ,
,![]() =1,2,...,
=1,2,...,![]() –
произвольные постоянные.
–
произвольные постоянные.
Набор поясняющих Примеров иллюстрирует наиболее сложные теоретические вопросы и предлагает рациональные схемы вычислений решения линейных однородных систем уравнений.
☺☺
Пример
8–06:Найти общее решение
системы уравнений:
 и ФСР.
и ФСР.
Решение:
1). Применим пошаговый процесс метода Гаусса:
-
3
2
1
3
5
3
2
1
3
5
6
4
3
5
7
0
0
1
-1
-3
9
6
5
7
9
=(1)→
0
0
2
-2
-6
=(2)→
3
2
0
4
8
0
0
-1
1
3
-
3
2
1
3
5
3
2
2
2
2
0
0
1
-1
-3
0
0
1
-1
-3
0
0
0
0
0
=(3)→
0
0
0
0
0
=(4)→
0
0
0
0
0
0
0
0
0
0
Выполнены операции: (1): [R4]–[R1]; [R2]–[R1]·2; [R3]–[R1]·3. (2): [R3]–[R2]·2; [R4]–[R2]. (3): [R1]–[R2]. (4): раскрываем полученный результат.
2).
Видим:
![]() =2.
Свободными неизвестными объявляем
=2.
Свободными неизвестными объявляем![]() ,
,![]() ,
,![]() .Раскрываемтаблицу:
.Раскрываемтаблицу:
3) Применяем правило Крамера:
![]() =
4;
=
4;![]() =
=![]() =
=![]() ;
;
![]() =
=![]() =
=![]() .
.
4). Общее решение
системы: x4=![]()
![]() ;
x5=
;
x5=![]()
![]() .
.
5). Построим ФСР (фундаментальную систему решений), избегая дробей:
-
x1
x2
x3
x4
x5
α1
4
0
0
9
-3
α2
0
4
0
6
-2
α3
0
0
4
8
-4
Векторы-решения
![]() ,
,![]() ,
,![]() линейно независимы, их количество
линейно независимы, их количество![]() =3.
Эти векторы могут быть приняты в качестве
ФСР.
=3.
Эти векторы могут быть приняты в качестве
ФСР.
Ответ: общее
решение: x4=![]()
![]() ;
x5=
;
x5=![]()
![]() ;
;
ФСР:
![]() =
(4, 0, 0, 9,–3) ;
=
(4, 0, 0, 9,–3) ; ![]() =
(0, 4, 0, 6, –2) ;
=
(0, 4, 0, 6, –2) ; ![]() =
(0, 0, 4, 8, –4).
=
(0, 0, 4, 8, –4).
Пример
8–07:Найти общее решение
системы уравнений:
 и ФСР.
и ФСР.
Решение:
1). Применим пошаговый процесс метода Гаусса:
|
1 |
0 |
-1 |
0 |
1 |
0 |
|
1 |
0 |
-1 |
0 |
1 |
0 |
|
|
0 |
1 |
0 |
-1 |
0 |
1 |
0 |
1 |
0 |
-1 |
0 |
1 | ||
|
1 |
-1 |
0 |
0 |
1 |
-1 |
=(1)→ |
0 |
-1 |
1 |
0 |
0 |
-1 |
=(2)→ |
|
0 |
1 |
-1 |
0 |
0 |
1 |
|
0 |
1 |
-1 |
0 |
0 |
1 |
|
|
1 |
0 |
0 |
-1 |
1 |
0 |
0 |
0 |
1 |
-1 |
0 |
0 |
|
1 |
0 |
-1 |
0 |
1 |
0 |
|
1 |
0 |
-1 |
0 |
1 |
0 |
|
|
0 |
1 |
0 |
-1 |
0 |
1 |
0 |
1 |
0 |
-1 |
0 |
1 | ||
|
0 |
0 |
1 |
-1 |
0 |
0 |
=(3)→ |
0 |
0 |
1 |
-1 |
0 |
0 |
=(4)→ |
|
0 |
0 |
-1 |
1 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
|
0 |
0 |
1 |
-1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Выполнены операции: (1): [R3]–[R1]; [R5]–[R1]. (2): [R3]+[R2]; [R4]–[R2]. (3): [R4]+[R3] ; [R5]–[R3]. (4): раскрываем полученный результат.
2).
Видим:
![]() =3.
Свободными неизвестными объявляем
=3.
Свободными неизвестными объявляем![]() ,
,![]() ,
,![]() .
.
3). Из уравнения
[R3] следует:![]() =
=![]() .
Далее из уравнения [R2]:
.
Далее из уравнения [R2]:
![]() =
=![]() –
–![]() ;
из уравнения [R1]:
;
из уравнения [R1]:
![]() =
=![]() –
–![]() . Получено общее
решение: как и в случае неоднородной
системы уравнений.
. Получено общее
решение: как и в случае неоднородной
системы уравнений.
5). Построим ФСР (фундаментальную систему решений), избегая дробей:
-
x1
x2
x3
x4
x5
x6
α1
1
1
1
1
0
0
α2
-1
0
0
0
1
0
α3
0
-1
0
0
0
1
Векторы-решения
![]() ,
,![]() ,
,![]() линейно независимы, их количество
линейно независимы, их количество![]() =3.
Эти векторы могут быть приняты в качестве
ФСР.
=3.
Эти векторы могут быть приняты в качестве
ФСР.
Ответ: общее
решение
![]() =
=![]() –
–![]() ,
,![]() =
=![]() –
–![]() ;
;![]() =
=![]() .
.
ФСР:
![]() =
(1,1,1,1,0,0);
=
(1,1,1,1,0,0);
![]() =(-1,0,0,0,1,0);
=(-1,0,0,0,1,0);
![]() =(0,-1,0,0,0,1).
=(0,-1,0,0,0,1).
Пример 8–08:Доказать, что для любой однородной системы линейных уравнений с рациональными (в частности с целыми) коэффициентами можно построить целочисленную фундаментальную систему решений.
Решение:
Для того, чтобы построить целочисленную фундаментальную систему решений, необходимо выполнить действия:
1). Применением пошагового процесса метода Гаусса привести матрицу коэффициентов системы при вычисляемых неизвестных к единичной форме.
2). Вычислим общий
знаменатель всех коэффициентов
преобразованной матрицы по каждой
свободной неизвестной
![]() .
Обозначим его через
.
Обозначим его через![]() .
.
3). Значения свободной
неизвестной
![]() будем выбирать так, чтобы в неё входил
множитель
будем выбирать так, чтобы в неё входил
множитель![]() .
.
Ответ: алгоритм представлен: хорошо бы применить!
Пример
8–09:Найти общее решение
системы:
 причем
так, чтобы каждое неизвестное было
представлено однородным линейным
выражением от параметров с целыми
коэффициентами.
причем
так, чтобы каждое неизвестное было
представлено однородным линейным
выражением от параметров с целыми
коэффициентами.
Решение:
1). Применим пошаговый процесс метода Гаусса:
-
3
2
5
2
7
3
2
5
2
7
6
4
7
4
5
0
0
-3
0
-9
3
2
-1
2
-11
=(1)→
0
0
-6
0
-18
=(2)→
6
4
1
4
-13
0
0
-6
0
-18
-
3
2
3
2
1
1

1

0
0
1
0
3
0
0
1
0
3
0
0
0
0
0
=(3)→
0
0
0
0
0
=(4)→
0
0
0
0
0
0
0
0
0
0
Выполнены операции: (1): [R4]–[R2]; [R2]–[R1]·2; [R3]–[R1]. (2): [R4]–[R3]; [R3]–[R2]·2; разделим [R2] на число (–3). (3): разделим [R1] на число 3. (4): раскрываем полученный результат.
2). Видим: общий знаменатель всех коэффициентов преобразованной матрицы равен 3. Обозначим его через N.
3). Свободными
неизвестными объявляем
![]() ,
,![]() ,
,![]() .
Примем:
.
Примем:![]() =3
=3![]() ,
,![]() =3
=3![]() ,
,![]() =3
=3![]() .
.
4). Из уравнения
[R2] следует:![]() =–3
=–3![]() ;
далее из уравнения [R1]:
;
далее из уравнения [R1]:
![]() =
=![]() . Подставим значения
свободных неизвестных:
. Подставим значения
свободных неизвестных:![]() =–9
=–9![]() –2
–2![]() –
–![]() ,
,![]() =–9
=–9![]() .
.
5). Требование
задания выполнено: при любых целых
значениях параметров
![]() ,
,![]() ,
,![]() все векторы-решения будут иметь целые
координаты.
все векторы-решения будут иметь целые
координаты.
Ответ: общее
решение системы:
![]() =–9
=–9![]() –2
–2![]() –
–![]() ,
,![]() =3
=3![]() ,
,![]() =–9
=–9![]() ,
,![]() =3
=3![]() ,
,![]() =3
=3![]() .
.
Пример 8–10:Доказать, что если в однородной системе линейных уравнений число уравнений на единицу меньше числа неизвестных, то в качестве решения можно принять систему миноров, полученных их матрицы коэффициентов поочерёдным вычёркиванием 1-го, 2-го и так далее столбцов, причём миноры берутся с чередующимися знаками.
Решение:
1). Проведём
доказательство на примере системы
четырёх уравнений с пятью неизвестными.
Такой системе соответствует матрицы
![]() и
и![]() :
:
![]() =
= →
→![]() =
= .
.
Замечание:
в матрице
![]() нижняя строка для удобства ссылок на
столбцы матрицы, матрица
нижняя строка для удобства ссылок на
столбцы матрицы, матрица
![]() отражает объявление свободной неизвестной
и перенос её в правую часть системы.
отражает объявление свободной неизвестной
и перенос её в правую часть системы.
2). Обозначим
определитель левой части преобразованной
системы через
![]() .
Минор матрицы
.
Минор матрицы![]() для элемента
для элемента![]() обозначим
обозначим![]() ,
,
![]() =1,2,...,5.
Применим формулы Крамера:
=1,2,...,5.
Применим формулы Крамера:
X1*:
Для вычисления![]() имеем:
имеем:![]() =
=![]() ,
где:
,
где:![]() =
=![]() ,
а для вычисления
,
а для вычисления![]() в матрице
в матрице![]() заменяем столбец-1 на столбец свободной
неизвестной; учитывая, что для получения
минора
заменяем столбец-1 на столбец свободной
неизвестной; учитывая, что для получения
минора![]() потребуется (5-2)-транспозиций столбцов,
учитываем это в записи определителя
множителем
потребуется (5-2)-транспозиций столбцов,
учитываем это в записи определителя
множителем![]() :
:![]() =–
=–![]() ·
·![]() ·
·![]() =
=![]() ·
·![]() ·
·![]() ;
учитывая, что
;
учитывая, что![]() =
=![]() ,
примем
,
примем![]() =
=![]() ·
·![]() ;
тогда:
;
тогда:![]() =
=![]() .
.
X2*:
Для вычисления![]() имеем:
имеем:![]() =
=![]() ;
для вычисления
;
для вычисления![]() в матрице
в матрице![]() заменяем столбец-2 на столбец свободной
неизвестной; учитывая, что для получения
минора
заменяем столбец-2 на столбец свободной
неизвестной; учитывая, что для получения
минора![]() потребуется (5-3)-транспозиций столбцов,
запишем:
потребуется (5-3)-транспозиций столбцов,
запишем:![]() =–
=–![]() ·
·![]() ·
·![]() =
=![]() ·
·![]() ·
·![]() ;
учитывая, что
;
учитывая, что![]() =
=![]() ·
·![]() ,
получим:
,
получим:![]() =–
=–![]() .
.
X3*:
Аналогично получим:![]() =
=![]() ;
;![]() =–
=–![]() .
.
Замечание:
в записи:
![]() =
=![]() ·
·![]() множитель
множитель
![]() обеспечивает при любом
обеспечивает при любом
![]() для первой неизвестной:
для первой неизвестной:
![]() =
=![]() ,
далее используется чередование знаков.
,
далее используется чередование знаков.
Ответ: доказательство получено: хорошо бы применить!
Пример
8–11:Используя результаты
предыдущего примера, найти общее и
частное решения для системы линейных
однородных уравнений: 
Решение:
1). Составим матрицы
![]() (для записи миноров) и
(для записи миноров) и![]() (для
наглядности):
(для
наглядности):
![]() =
= →
→![]() =
= .
.
2). Вычислим миноры
![]() матрицы
матрицы![]() для элементов
для элементов![]() ,
,![]() =1,2,...,4:
=1,2,...,4:
![]() =
= =–6,
=–6,![]() =
= =11,
=11,![]() =
= =–9,
=–9,![]() =
= =4,
=4,
3). Частное решение:
![]() =
=![]() =–6,
=–6,![]() =
=![]() =11,
=11,![]() =
=![]() =–9,
=–9,![]() =
=![]() =4.
Общее решение:
=4.
Общее решение:![]() =–6
=–6![]() ,
,![]() =11
=11![]() ,
,![]() =–9
=–9![]() ,
,![]() =
=![]() 4.
4.
Замечание: общее решение записано с учётом доказательства, приведённого в предыдущем примере.
Ответ: Частное
решение:
![]() =
=![]() =–6,
=–6,![]() =
=![]() =11,
=11,![]() =
=![]() =–9,
=–9,![]() =
=![]() =4.
Общее решение:
=4.
Общее решение:![]() =–6
=–6![]() ,
,![]() =11
=11![]() ,
,![]() =–9
=–9![]() ,
,![]() =
=![]() 4.
4.
Пример 8–12:Найти условия, необходимые и достаточные для того, чтобы либо сумма двух решений системы линейных уравнений, либо произведение одного решения этой системы на число, не равное единице, было вновь решением этой системы.
Решение:
Из доказательства теоремы о фундаментальной системе решений следует: система линейных уравнений должна быть однородной!
Ответ: доказано.
Пример
8–13:Решить систему
уравнений:
 записав общее решение в виде суммы
частного решения неоднородного уравнения
и общего решения присоединённой
однородной системы.
записав общее решение в виде суммы
частного решения неоднородного уравнения
и общего решения присоединённой
однородной системы.
Решение:
1). Полное исследование системы позволяют провести как метод Гаусса, так и алгоритм в соответствии с теоремой Кронекера-Капелли. Применим пошаговый процесс метода Гаусса:
|
12 |
14 |
-15 |
23 |
27 |
5 |
|
|
2 |
2 |
1 |
3 |
4 |
1 |
|
|
16 |
18 |
-22 |
29 |
37 |
8 |
|
|
0 |
2 |
-30 |
5 |
5 |
0 |
|
|
18 |
20 |
-21 |
32 |
41 |
9 |
=(1)→ |
2 |
2 |
1 |
3 |
4 |
1 |
=(2)→ | |
|
10 |
12 |
-16 |
20 |
23 |
4 |
|
|
0 |
2 |
-21 |
5 |
3 |
-1 |
|
|
2 |
2 |
1 |
3 |
4 |
1 |
|
|
|
0 |
2 |
-30 |
5 |
5 |
0 |
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
=(3)→ | |
|
0 |
0 |
9 |
0 |
-2 |
-1 |
|
|
Выполнены операции: (1): [R1]–[R4]; [R3]–[R2]; [R2]–[R1]·8; [R4]–[R1]·5. (2): [R3]–[R1]; [R4]–[R2]. (3): обрабатываем результаты.
2). Получены результаты: - система совместна;
- ранг системы
равен 3; свободные неизвестные:
![]() и
и![]() :
:
- раскрываем строки преобразованной системы:
из уравнения [R4]:
![]() =
=![]() ;
из уравнения[R2],
с учётом найденного значения неизвестной
;
из уравнения[R2],
с учётом найденного значения неизвестной
![]() запишем
запишем ![]() =
=![]() ;
из уравнения[R1],
с учётом найденных значения неизвестных
;
из уравнения[R1],
с учётом найденных значения неизвестных
![]() и
и ![]() :
:
![]() =
=![]() .
.
3). Частное решение
системы найдём при условии, что свободным
неизвестным присвоили значения
![]() =1,
=1,![]() =1
=1![]() =
=![]() ;
;
![]() =
=![]() ;
;
![]() =
=![]() ,
обозначим его:
,
обозначим его: ![]() =
=![]() .
.
4). Общее решение
присоединённой однородной системы:
![]() =
=![]() ,
,
![]() =
=![]() ;
;
![]() =
=![]() .
Построим ФСР (фундаментальную
систему решений):
.
Построим ФСР (фундаментальную
систему решений):
-
x1
x2
x3
x4
x5
α1
2
-5
0
2
0
α2
-53
15
4
0
18
Векторы-решения
![]() ,
,
![]() линейно независимы, их количество
линейно независимы, их количество![]() =2.
Эти векторы могут быть приняты в качестве
ФСР.
=2.
Эти векторы могут быть приняты в качестве
ФСР.
5). Общее решение
системы:
![]() =
=![]() +
+![]() =
=![]() +
+![]() +
+![]() .
.
Ответ: общее
решение:
![]() =
=![]() +
+![]() +
+![]() .
.
Пример 8–14:Найти условия, необходимые и достаточные для того, чтобы четыре плоскости:
 проходили через
одну точку.
проходили через
одну точку.
Решение:
P1*: Чтобы воспользоваться геометрическими образами, полученными при изучении определителей 3-го порядка, сначала рассмотрим только первые три уравнения:
 (1)
(1)
В
геометрии каждому линейному уравнению
системы соответствует плоскость. Найти
решение системы, значит найти точки,
принадлежащие одновременно всем трем
плоскостям: α1,
α2,
α3.
Известно, что каждой плоскости
соответствует вектор нормали. В нашем
случае:
![]() ,
,
![]() и
и
![]() –
строки коэффициентов
уравнений и определителя d.
Используя определение смешанного
произведения векторов
–
строки коэффициентов
уравнений и определителя d.
Используя определение смешанного
произведения векторов
![]()
![]()
![]() ,
нетрудно заметить, что
,
нетрудно заметить, что
![]()
![]()
![]() =
= =
d
≠0 равносильно утверждению, что векторы
=
d
≠0 равносильно утверждению, что векторы
![]() ,
,![]() ,
,![]() – некомпланарные → единственность
точки, общей трём плоскостям, в этом
случае очевидна! Но, эта точка
– некомпланарные → единственность
точки, общей трём плоскостям, в этом
случае очевидна! Но, эта точка
![]() и есть решение системы уравнений.
и есть решение системы уравнений.
Если
![]()
![]()
![]() =
d
=0, то векторы
=
d
=0, то векторы
![]() ,
,![]() ,
,![]() – компланарны! Каким будет взаимное
расположение плоскостей α1,
α2,
α3
в этом случае, и как представится
соответствующее ему решение системы –
наиболее трудоёмкая часть исследований!
– компланарны! Каким будет взаимное
расположение плоскостей α1,
α2,
α3
в этом случае, и как представится
соответствующее ему решение системы –
наиболее трудоёмкая часть исследований!
П устьd
≠0.
В этом случае решение системы (21) может
быть записано при помощи формул
Крамера
(используются выражения (23)):
устьd
≠0.
В этом случае решение системы (21) может
быть записано при помощи формул
Крамера
(используются выражения (23)):
![]() ,
,
![]() ,
,
![]() .
.
Полученные формулы определяют единственное решение (т.к. отношение двух чисел, принадлежащих полю вещественных чисел, определяет единственное число!).
Из этого следует, что все заданные плоскости будут пересекаться в одной точке, если каждые из трёх плоскостей будут пересекаться в одной точке. Алгебраические требования в этом случае используют теорему Кронекера-Капелли. А именно, система уравнений:
 (2)
(2)
должна иметь
единственное решение, то есть ранги
матриц
![]() и
и![]() должны быть равны!
должны быть равны!
Так как решение системы уравнений всегда включает только конечные числа, то проведённый анализ должен сослаться на то, точка пересечения плоскостей конечная!
Если допустить к рассмотрению и бесконечно удалённые точки, то исследования необходимо продолжить.
Вновь обратимся к первым трём плоскостям, то есть к системе уравнений (1). Воспользуемся геометрическими свойствами плоскостей.
2 *.
Пустьd
=0.
В
этом случае определить координаты точки
пересечения плоскостей (x1,
x2
, x3),
используя формулы Крамера:
*.
Пустьd
=0.
В
этом случае определить координаты точки
пересечения плоскостей (x1,
x2
, x3),
используя формулы Крамера:
![]() ,
,
![]() ,
,
![]() ,
не удаётся: деление на нуль не определено
в поле вещественных чисел. Чем
может закончиться решение системы
уравнений в этом случае?
,
не удаётся: деление на нуль не определено
в поле вещественных чисел. Чем
может закончиться решение системы
уравнений в этом случае?
1)
![]() ,
,![]() и
и![]() –
компланарны, но плоскости α1,
α2,
α3
различны: линии их пересечения
параллельны → общей точки 3-х плоскостей
нет. Следует: система
несовместна.
–
компланарны, но плоскости α1,
α2,
α3
различны: линии их пересечения
параллельны → общей точки 3-х плоскостей
нет. Следует: система
несовместна.
Для
исследования соответствия геометрического
образа и системы коэффициентов матрицы
![]() рассмотрим 4-мерные векторы:
рассмотрим 4-мерные векторы:
![]() ,
,
![]() ,
,
![]() .
.
В
этом случае
![]() ,
,![]() ,
,![]() – линейно независимы, и поэтому имеем:
определители d1
≠0,
d2
≠0, d3
≠0.
– линейно независимы, и поэтому имеем:
определители d1
≠0,
d2
≠0, d3
≠0.
2 )
)
![]() ,
,![]() и
и![]() –
компланарны, но плоскости α1,
α2,
α3
различны: линии их пересечения
совпадают (пучок
плоскостей!);
общие точки трех плоскостей: общая
линия пересечения. В этом случае
система имеет бесчисленное
множество решений,
говорят – система
неопределенна.
–
компланарны, но плоскости α1,
α2,
α3
различны: линии их пересечения
совпадают (пучок
плоскостей!);
общие точки трех плоскостей: общая
линия пересечения. В этом случае
система имеет бесчисленное
множество решений,
говорят – система
неопределенна.
Для
исследования соответствия геометрического
образа и системы коэффициентов матрицы
![]() воспользуемся 4-мерными векторами:
воспользуемся 4-мерными векторами:
![]() ,
,
![]() ,
,
![]() .
.
В
этом случае векторы
![]() ,
,![]() ,
,![]() – линейно зависимы, причём так, что один
из них является линейной комбинацией
двух других: это следует
из уравнения пучка плоскостей!
Учитывая свойства определителя, имеем:
– линейно зависимы, причём так, что один
из них является линейной комбинацией
двух других: это следует
из уравнения пучка плоскостей!
Учитывая свойства определителя, имеем:
![]() =0,
=0,
![]() =0,
=0,
![]() =0.
Это значит, что фактически система
состоит из двух уравнений, и одной из
переменных можно присваивать произвольные
значения!
=0.
Это значит, что фактически система
состоит из двух уравнений, и одной из
переменных можно присваивать произвольные
значения!
3 )
)
![]() ||
||![]() ,
но плоскости α1,α2,α3
различны: плоскость α3
пересекает параллельные плоскости
α1,α2
по двум параллельным прямым. В этом
случае система не
имеет решений,
говорят – система
несовместна.
,
но плоскости α1,α2,α3
различны: плоскость α3
пересекает параллельные плоскости
α1,α2
по двум параллельным прямым. В этом
случае система не
имеет решений,
говорят – система
несовместна.
В
соответствии с геометрическим образом,
представленном на рисунке, векторы:
![]() ,
,
![]() ,
,
![]()
линейно независимы! Учитывая свойства определителя, получим: d1 ≠0, d2 ≠0, d3 ≠0.
4 )
)
![]() ||
||![]() и плоскости α1,α2
совпадают: линия пересечения плоскости
α3
с плоскостями α1,α2
есть общие точки всех 3-х плоскостей.
В этом случае система имеет бесчисленное
множество решений,
говорят – система
неопределенна.
и плоскости α1,α2
совпадают: линия пересечения плоскости
α3
с плоскостями α1,α2
есть общие точки всех 3-х плоскостей.
В этом случае система имеет бесчисленное
множество решений,
говорят – система
неопределенна.
В соответствии с геометрическим образом, представленном на рисунке, векторы:
![]() ,
,
![]() ,
,
![]()
линейно зависимы! Учитывая свойства определителя: d1 =0, d2 =0, d3 =0.
5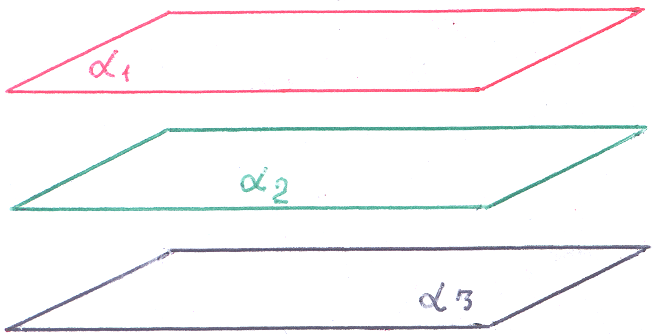 )
)
![]() ||
||![]() ||
||![]() ,
но плоскости α1,α2,α3
различны (и параллельны): плоскости
α1,α2,α3
не имеют общих точек. В этом случае
система не
имеет решений,
говорят – система
несовместна.
,
но плоскости α1,α2,α3
различны (и параллельны): плоскости
α1,α2,α3
не имеют общих точек. В этом случае
система не
имеет решений,
говорят – система
несовместна.
В соответствии с геометрическим образом, представленном на рисунке, векторы:
![]() ,
,
![]() ,
,
![]()
линейно независимы! Учитывая свойства определителя, получим: d1 ≠0, d2 ≠0, d3 ≠0.
6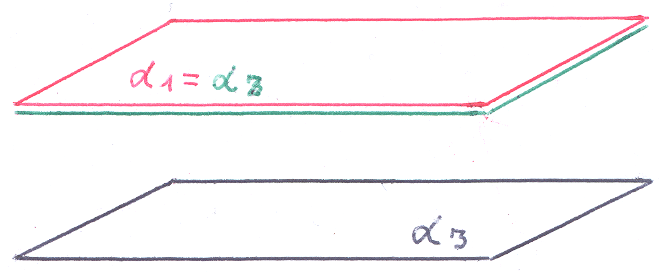 )
)
![]() ||
||![]() ||
||![]() ,
плоскости α1,α2
совпадают, плоскость α3
им параллельна: плоскости α1,
α2,
α3
не имеют общих точек. В этом случае
система не
имеет решений,
говорят – система
несовместна.
,
плоскости α1,α2
совпадают, плоскость α3
им параллельна: плоскости α1,
α2,
α3
не имеют общих точек. В этом случае
система не
имеет решений,
говорят – система
несовместна.
В
соответствии с геометрическим образом,
представленном на рисунке, векторы: ![]() ,
,
![]() ,
,
![]()
линейно независимы! Учитывая свойства определителя, получим: d1 ≠0, d2 ≠0, d3 ≠0.
7 )
)
![]() ||
||![]() ||
||![]() ,
и плоскости α1,α2,α3
совпадают: все точки одной из плоскостей
α1,
α2,
α3
принадлежат двум другим. В этом случае
система имеет бесчисленное
множество решений,
говорят – система
неопределенна.
,
и плоскости α1,α2,α3
совпадают: все точки одной из плоскостей
α1,
α2,
α3
принадлежат двум другим. В этом случае
система имеет бесчисленное
множество решений,
говорят – система
неопределенна.
В
соответствии с геометрическим образом,
представленном на рисунке, векторы: ![]() ,
,
![]() ,
,
![]()
коллинеарны! Это значит: фактически имеем одно уравнение с тремя неизвестными, и двум из переменных можно присваивать произвольные значения. Учитывая свойства определителя, получим: d1 =0, d2 =0, d3 =0.
Анализ всех
возможных случаев расположения трёх
плоскостей показывает, что общая
бесконечно удалённая точкадля
четырёх плоскостей существует только
в случае, если векторы:![]() ,
,![]() ,
,![]() ,
,![]() линейно зависимые. Алгебраическое
выражение этого факта:
линейно зависимые. Алгебраическое
выражение этого факта:
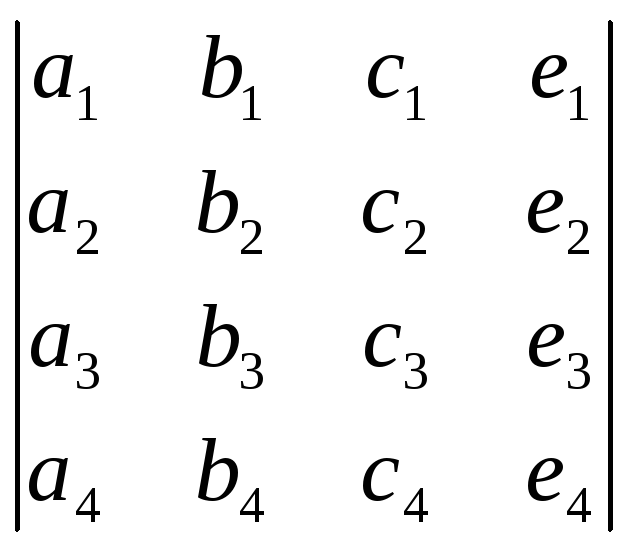 =0.
=0.
Ответ: анализ и полученные результаты представлены в тексте.
В рассмотренных поясняющих примерах максимально возможно иллюстрируются как теоретические особенности изучаемого материала, так и вычислительные технологии. В следующем параграфе закрепляются образы теоретические и отрабатываются приобретённые навыки вычислений.
☻