

d2′ = m z2′ = 1,5 × 20 = 30 мм; d3 = m z3 = 1,5 × 22 = 33 мм;
da2′ = d2′ + 2m = 30 + 2 × 1,5 = 33 мм; da3 = d3 + 2m = 33 + 2 × 1,5 = 36 мм;
df2′ = d2′ - 2,5m = 30 + 2,5 × 1,5 = 26,25 мм;
df3′ = d3 - 2,5m = 33 - 2,5 × 1,5 = 29,25 мм; bw =12 мм.
Проверочный расчет для зубчатой пары 2¢ - 3 выполняется по той же методике, что и в примере 1.
2. Электродвигатели приводов
Общие сведения об электроприводе
Основной задачей привода является обеспечение перемещения ис- полнительного органа механизма по заранее заданному закону и пре- одоления приложенных к нему сил сопротивления.
Каждый привод состоит из трех основных частей: двигателя, передающего устройства и исполнительного механизма, с которым жестко связан рабочий орган.
Чтобы привести в движение современные технологические маши- ны, почти всегда необходима электроэнергия, поэтому электропривод является наиболее применяемой системой. Широкому использованию электропривода способствуют такие его достоинства, как возможность осуществления любой программы, большая гибкость в управлении, возможность применения нормализованных и стандартных устройств.
В зависимости от характера работы существует два типа электро- привода: силовой и следящий.
Силовой привод служит для преодоления момента нагрузки на вы- ходном валу при заданной частоте вращения последнего. Включение, отключение и реверс в таком приводе осуществляются через относи- тельно большие интервалы времени. В системах дистанционного управ- ления силовой привод обычно включает предохранительные муфты, муфты сцепления, торможения, концевые выключатели, коммутацион- ные и другие элементы управления, блокировки и сигнализации.
Следящий электропривод является более сложным устройством; его применяют в автоматических системах управления или регулирова- ния. Для следящего привода характерны повторно-кратковременные режимы работы, высокое быстродействие, большая частота пусков и реверсов, отработка определенных законов изменения частоты враще-
40
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
ния выходного вала. В следящем приводе помимо элементов управле- ния, блокировки и сигнализации имеются датчики обратной связи по углу и скорости, элементы дистанционных передач, отсчетные меха- низмы высокой точности. Следящий привод работает в условиях посто- янного реверса, поэтому в нем на первый план выдвигаются инерцион- ные нагрузки.
Для преобразования электрической энергии в механическую слу- жат электродвигатели постоянного и переменного тока. Отдельную группу составляют шаговые электродвигатели, которые осуществляют преобразование импульсных электрических сигналов в последователь- ные дискретные угловые перемещения вала.
Электродвигатели постоянного тока
По виду возбуждения (по принципу создания магнитного потока) электродвигатели постоянного тока делятся на две группы: с возбужде- нием от постоянных магнитов и с возбуждением от электромагнитов. Первые не требуют источника питания для статора. Последние по ха-
рактеру включения обмотки статора делятся на электродвигатели с параллельным, последовательным и смешанным возбуждением.
Электродвигатели постоянного тока с возбуждением от постоян-
ных магнитов в настоящее время широко используются в силовых и следящих приводах. Основные преимущества электродвигателей посто- янного тока, обусловившие их широкое применение, заключаются в большом диапазоне регулирования скорости вращения, линейности их механических и регулировочных характеристик, высоком быстродейст- вии. Эти электродвигатели имеют малый объем и вес на единицу мощ- ности и более высокий КПД по сравнению с электродвигателями пере- менного тока той же мощности.
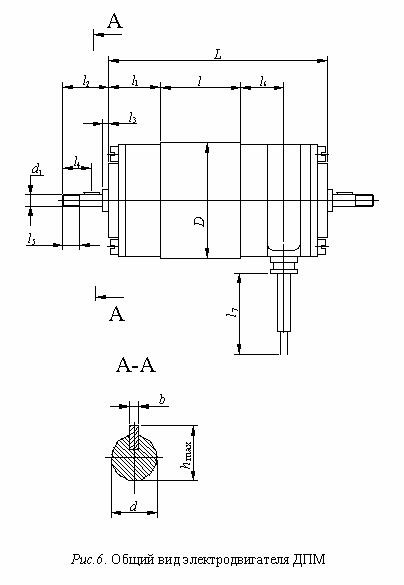
Электродвигатели серии ДПМ являются двухполюсными электри- ческими машинами с возбуждением от внешнего кольцевого постоянно- го магнита и имеют якорь классической конструкции (пакет якоря на- бран из шихтованной электротехнической стали).
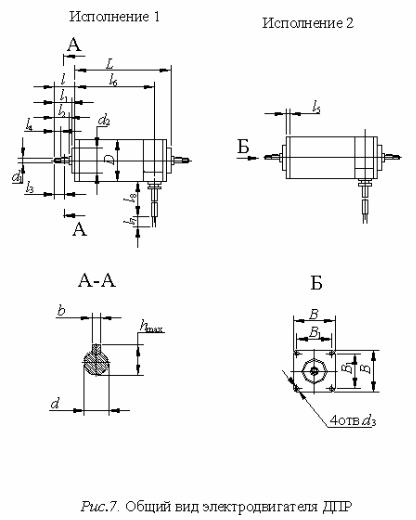
В отличие от электродвигателей серии ДПМ электродвигатели се- рии ДПР имеют полый бескаркасный якорь. Возбуждение осуществля-
ется от расположенного внутри якоря двухполюсного цилиндрического постоянного магнита. Благодаря такой конструкции электродвигатели серии ДПР имеют более высокий КПД, больший срок службы и мень- шую электромеханическую постоянную времени.
41
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
|
Основным недостатком двигателей постоянного тока является на- |
|
личие скользящего контакта в коллекторе. Между |
щетками и контакт- |
|
ными пластинами возникает искрение, что приводит к снижению ста- |
||
бильности характеристик двигателя, вызывает помехи в работе радио- |
||
схем, не позволяет использовать двигатели в агрессивных средах. |
||
|
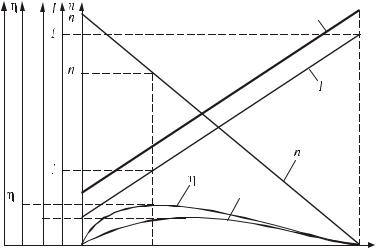
Рабочие характеристики электродвигателей постоянного тока с |
|
возбуждением от постоянных магнитов [n = f(Т), I = f(Т), P1 = f(Т), P2 = |
||
f(Т) и η = f(Т)] представлены на рис.5 [3]. |
|
|
|
Общий вид - на рис.6 и 7, технические характеристики - в табл.2 и |
|
4, габаритные и присоединительные размеры - в табл.3 и 5. |
||
P1 |
P2 |
P1 |
|
0 |
|
|
п |
|
|
н |
|
|
н |
|
|
P2 |
|
|
max P2 |
T |
|
max |
|
|
|
|
|
Tн |
Tп |
Рис.5. Рабочие характеристики электродвигателя постоянного тока: I - ток |
||
якоря; P1 - потребляемая мощность; P2 - полезная мощность на валу; n0 - час- |
||
тота вращения вала при холостом ходе; Тн - момент на валу при номинальной |
||
нагрузке; Тп - пусковой момент; η - КПД; Iп - пусковой ток; Iн - ток якоря при |
||
номинальной нагрузке |
|
|
|
На корпусах электродвигателей выгравированы обозначения и |
|
заводской номер. |
|
|
42
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
43
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
Пример расшифровки обозначения электродвигателя
ДПМ-20-Н1-01
ДПМ - электродвигатель постоянного тока с возбуждением от по- стоянных магнитов; 20 - наружный диаметр корпуса, мм; Н1 - исполне-
44
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com