

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РФ
Московский Государственный Технический Университет «МАМИ»
Кафедра «АССиИ»
Дисциплина Гос. экзамен по спец.
для студентов 10 семестра
факультета АиУ
Экзаменационный билет № _____11_____
Разработать РТК на базе сверлильно-фрезерно- расточного станка мод. 243МВФ2 и напольного робота для обработки корпуса гидрораспределителя.
Разработать эскиз заготовки .
Выбрать транспортно-накопительное средство для транспортирования
заготовок и обработанных деталей, а так же ПР.
Разработать компоновку .
Разработать программу коодинатных перемещений стола станка для позиционирования детали под сверление 4-х отверстий под резьбу.
Выбрать прогрессивные инструменты, рассчитать режимы резания и машинное время обработки для каждого перехода.
Разработать эскизы наладок.
Рассчитать подшипники шпинделя станка на долговечность.
Исходные данные: эскиз детали, марка материала, шероховатость.
Зав. кафедрой
проф., д.т.н. Максимов Ю.В.
1. Разработать эскиз заготовки и определить ее вес.
Краткая характеристика детали.
Корпус гидрораспределителя имеет прямоугольную форму с внутренними отверстиями Ø25+0,1, с канавками Ø28+0,4 и отверстиями под резьбу М12×1,8. (см. рис.1).
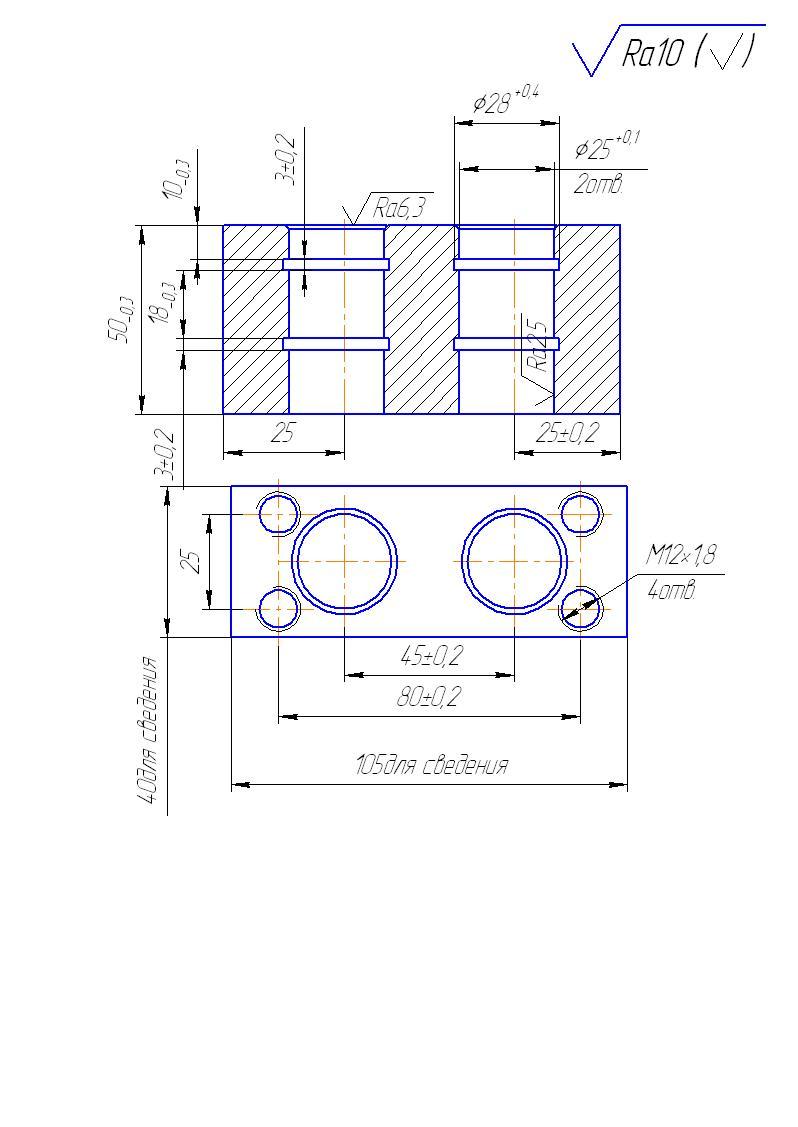
Рисунок 1. Деталь.
Заготовка получена методом литья в кокиль: Расчет по ГОСТ 26645-85..
Исходные данные по детали:
Материал: Чугун СЧ20 ГОСТ 1412-85; Твердость по Бринеллю НВ=170, Содержание химических элементов:
–фосфор Р=0…0,2%
–углерод С=3,3…3,5%
.–сера S=0…0,15%
–марганец Мп=0,7…1%
–кремния Si=1,4…2,4%
Масса детали – 1 кг.
Исходные данные для расчёта:
Масса отливки – 1,2 кг.(расчётная); принимаем класс точности отливки 9-9-7-2 ГОСТ26456-85, квалитет по ГОСТ25346-89 принимаем 12, шероховатость поверхности Ra10(мкм), литейные уклоны 1°, принимаем наружные радиусы 3мм, внутренние 6мм.

Рисунок 2. Заготовка.
Выбрать транспортно-накопительное средство для транспортирования
заготовок и обработанных деталей, а так же ПР.
В данной работе выбираем следующую схему компоновки РТК: Станок – промышленный робот – тактовый стол.
Выбираем первичные характеристики станка, ПР и ТНС.
2.1Станок
Выбираем сверлильно-фрезерно- расточной станок мод. 243МВФ2 с числовым программным управлением. Станок мод. 243МВФ3, предназначен для Сверления, фрезерования и расточки корпусных поверхностей деталей типа корпус в один или несколько проходов в замкнутом полуавтоматическом цикле.. Система ЧПУ, применяем на станке – DEN JNCO.
Техническая характеристика оборудования
-
Наименование параметров
Станок мод.243МВФ3
Число управляемых координат
4
Размер паллеты (стола), мм
1600×2000
Мощность, квт
37
Перемещение вдоль оси X,мм
4000
Перемещение вдоль оси Y,мм
2500
Перемещение вдоль оси Z,мм
1250/1600
Угол поворота вокруг оси,°
360
Частота вращения шпинделя, мин
6…2000/6…3150
Вместимость инструметального магазина, шт.
30
2.2Выбор промышленного робота.
Одним из важнейших факторов при выборе ПР является его грузоподъемность, число степеней подвижности и т.д. Исходя из массы заготовки 1,2 кг, выбираем ПР типа Универсал - 5, грузоподъемность которого 5 кг.. Рука промышленного робота повернута в вертикальной плоскости вниз, что обеспечивает захват детали по сфере с учётом её расположении на накопительном устройстве.
Техническая характеристика пр «Универсал - 5»
Номинальная грузоподъемность, кг……………………………………….5
Число степеней подвижности………………..…………………………… 6
Число рук ………………………………………………..……………….....1
Тип привода ……………..…………………. ……………..Электрический
Система управления…………………...…………………… Позиционная
Число программируемых координат……………………….…………….4
Способ программирования перемещений …………………......обучение
Погрешность позиционирования, мм………………………………....±0,1
Наибольший вылет руки R, мм…………………………………….….1600
Масса (вместе с устройством управления), кг ………………………..690
Габаритные размеры, мм:
Н………………………………………………………………1630
L……………………………………………………………….870
B……………………………………………………………...1100