

Терехин. Учебное пособие
.pdfStep
Sine Wave
|
+ |
|
+ |
|
+ |
s |
- |
s |
- |
s |
- |
Sine Wave1 |
|
|
|
|
|
Clock |
|
|
|
|
|
Switch |
|
|
Switch1 |
||
Sine Wave2
Tm |
|
ir_abc |
|
A |
|
is_abc |
|
m |
|
|
|
B |
|
m |
|
|
|
|
|
C |
|
w m |
|
Asynchronous Machine |
Te |
|
|
SI Units |
|
|
|
|
|
|
|
|
|
Machines |
Scope |
|
Measurement |
||
|
|
||
|
|
Demux |
|
0 |
|
|
|
Multimeter |
|
|
|
XY Graph
Рис. 1.56. Модель реверсивного электропривода переменного тока с прямым включением двигателя в сеть (Fig 1_56)
Настройка задающих генераторов синусоидального сигнала, упра вляемых источников напряжения и переключателей показана на рис. 1.57.
Рис. 1.57. Настройка блоков управления модели привода переменного тока
Результаты моделирования процессов пуска и реверса представле ны на рис. 1.58. Текущее значение токов представлено в каждой фазе.
61

Рис. 1.58. Переходные процессы пуска и реверса асинхронного двигателя
На первом временном отрезке от 0 до 3 с на двигатель подаётся на пряжение с прямым чередованием фаз. Двигатель разгоняется под на грузкой 30 Н.м «вперёд» (положительный знак частоты вращения). Пу сковой ток в обмотке статора достигает амплитудного значения 86,93 А. Примерно такое же значение достигает ток в обмотке ротора 77,6 А, так как выводится значение тока ротора в обмотке ротора, приведённое к об мотке статора. Электромагнитный момент двигателя носит колебатель ный характер, что приводит к ухудшению пусковых свойств двигателя и является недостатком асинхронного двигателя. Максимальное значение текущего значения момента составило при пуске «вперёд» 147 Н.м. При увеличении частоты вращения, колебания момента двигателя затухают, интенсивность роста частоты вращения возрастает. При этом ток стато ра уменьшается при неизменной частоте 50 Гц, в то же время ток в обмот ке ротора тоже уменьшается, но с уменьшением частоты тока ротора. Это объясняется выбором неподвижной системы координат. В установив шемся режиме (текущее время чуть менее 3 с) частота вращения достига ет значения 150,4 1/с (при ω0 = (1500.2π)/60 = 157 1/c), момент двигате ля – 29,94 Н.м (при нагрузке 30 Н.м), амплитудное значение тока ста тора – 11,6 А, амплитудное значение тока ротора – 11,02 А.
62

В момент времени 3 с производится реверс двигателя путём измене ния порядка чередования фаз. Эту задачу выполняют переключатели Switch. Идет переходный процесс реверса: ток в обмотке ротора достига ет 106,9 А амплитудного значения (рис. 1.58), частота тока в обмотке ро тора чуть менее 100 Гц. Происходит противоточное торможение (двига тель включен «назад», а ещё вращается «вперёд»). Момент двигателя по прежнему имеет колебательный характер, максимальное значение соста вляет –170,1 Н.м. По мере уменьшения частоты вращения колебатель ность момента затухает, частота вращения достигает нулевого значения и начинает расти в отрицательной области, которую мы уже назвали «на зад». Частота вращения достигает значения –162,3 1/с (рис. 1.58), превы шающего частоту идеального холостого хода 157 1/с, это свидетельствует о том, что двигатель работает в режиме генераторного торможения и раз вивает положительный момент +30,52 Н.м, равный заданному моменту нагрузки 30 Н.м. Ток ротора и статора уменьшился до установившегося значения, соответствующего нагрузке 30 Н.м.
Рис. 1.59. Динамическая механическая характеристика асинхронного |
двигателя при пуске и реверсе с активным моментом нагрузки 30 Н.м |
63

На рис. 1.59 приведена снятая при пуске и реверсе механическая характеристика двигателя. Колебательный характер момента при пуске и реверсе весьма существенно изменяет вид механической характери стики. При пуске максимальное значение момента достигает значения около 150 Н.м, однако среднее значение, определяющее интенсивность пуска, невелико. Наиболее близка к статической механическая харак теристика, рассчитанная при пуске двигателя «назад». Двигатель разви вает пусковой момент –51,77 Н.м (рис. 1.59), максимальный момент –76,6 Н.м при частоте вращения –111,2 1/с и разгоняется до частоты вращения, большей, чем частота идеального холостого хода.
Основной вывод состоит в том, что в модель двигателя можно вве сти только активный момент. Виртуальный двигатель из библиотеки SimPowerSystems не способен работать с реактивной нагрузкой, тем бо лее со смешанной.
1.2.4. Исследование модернизированной модели асинхронного двигателя в Simulink
Раскроем модель асинхронной машины. Для этого вызовем файл Fig 1_60 (рис. 1.60) и щелчком правой кнопки мыши вызовем динами ческое меню.
TL |
m |
|
TL |
m |
ir_abc |
|
Ta |
a |
|
Ta |
a |
is_abc |
|
A |
|
A |
||||
|
|
|
||||
b |
|
b |
m |
|||
B |
|
B |
||||
|
0 |
|
wm |
|||
C |
c |
C |
c |
|||
|
||||||
|
|
|||||
Asynchronous Dv |
Multimeter |
Asynchronous Dv |
Te |
|||
|
||||||
|
SI Units |
|
|
pu Units |
Machines |
|
Measurement
Demux
Рис. 1.60. Модернизированные модели асинхронного двигателя для ввода параметров в абсолютных (Si Units) и относительных (pu Units) единицах
Выбираем команду Look Under Mask и раскрываем двигатель (рис. 1.61). В отличие от существующей модели, приведённой в SimPowerSy* stems, заменено обозначение активного момента с Tm на Ta и введен до полнительный вход для реактивного момента TL. Раскрываем двойным щелчком левой кнопки мыши блок ASM_mechanics и вносим измене ния, связанные с моделированием реактивного момента нагрузки
(рис. 1.62).
64

|
ASM |
|
1 |
|
4 |
A |
|
a |
2 |
powersysdomain |
5 |
B |
|
b |
3 |
|
6 |
C |
|
c |
|
Source |
|
|
i |
[tp520155] |
[tp520173] |
v |
Goto |
|
|
|
From |
m |
|
thr,wr
Te
|
m_e |
Out1 |
|
1 |
|
m_m |
|
||
|
|
|
|
|
|
Measurement list |
m |
||
Ta
Ta
 2
2
m
Te 
TL
thr,wr
TL 1
1
ASM_mechanics
Рис. 1.61. Структура модели асинхронного двигателя
TL |
|
1_Tb1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
-K- |
|
|
|
|
|
|
|
|
|
|
|
Tf |
Out1In1 |
|
TL |
|
|
|
|
|
|
|
speed |
|
|
||
|
|
|
|
|
In2 |
|
|
|
|
|
|
|
product(y) |
|
|
|
|
||
|
|
|
Out2In3 |
|
Te-Ta |
|
|
||
|
1_Tb2 |
|
|
|
|
|
|
||
|
|
|
Reactiv mom |
|
|
|
|
||
|
|
|
|
|
|
|
|
||
1 |
-K- |
|
|
|
|
|
|
|
|
Ta |
|
|
|
|
|
|
|
|
|
|
|
-K- |
1/s |
-K- |
1/s |
|
|
|
2 |
|
Product |
|
|
|
|
|
|
|
|
|
1_2H |
|
|
|
|
|
|
thr,wr |
|
|
|
|
|
|
|
|
|
||
|
|
|
F |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
w,Te,thr |
-K- |
1 |
Te |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
m |
||
|
|
|
|
|
|
|
|
Gain |
|
|
|
|
|
|
|
1/p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.62. Модернизированная схема блока ASM_mechanics |
|
|||||||
Для модернизации используем модель реактивной нагрузки, со держащейся в файле Fig 1_23. Введённые дополнительные блоки выде лены синим цветом. Блок Reactiv mom введён без изменения, что для двигателя постоянного тока. Так как моделирование электромагнитно го момента Te в модели в SimPowerSystems для асинхронного двигателя производится в некотором масштабе, то абсолютные значения актив ного и реактивного моментов нагрузки приводятся к масштабу Te через
65

масштабные блоки 1_Tb2 и 1_Tb1. Масштабный коэффициент на ча стоту вращения вводить не нужно, так как блок реактивного момента выделяет только знак частоты вращения.
Модернизация модели в относительных единицах не отличается от приведённой для абсолютных единиц, так как блоки ASM_mechanics выполнены одинаковыми.
Ввод исходной информации в диалоговое окно по двигателю в от носительных единицах не вызывает особых затруднений, кроме пара метра H(s) (см. рис. 1.63).
Рис. 1.63. Диалоговое окно для ввода параметров АКЗ двигателя в относительных единицах
В технической литературе [3] известно выражение H = (JΣωb2)/(Mb p), где Н – эквивалент момента инерции в относитель ных единицах. Однако выражение для Н приведено для относительно го времени. С учетом действительного времени это выражение прини мает вид: H = (JΣωb)/(Mb p).
В Help приводится уравнение движения привода (1.39), в котором параметр Н записан с коэффициентом 2:
d |
ω |
|
= |
1 |
(T |
− Fω −T −TL). |
(1.39) |
dt |
|
2H |
|||||
|
m |
|
e |
m a |
|
С учетом принятой в Simulink условностью выражение для H(s) принимает вид:
66

H (s) = |
J∑ωb |
. |
(1.40) |
|
|||
|
2Mb p |
|
|
В диалоговое окно (см. рис. 1.63) введено значение H(s), вычисленное по формуле (1.40).
Рассмотрим два файла моделей с вводом параметров в абсолютных и безразмерных (относительных) единицах (рис. 1.64 и 1.65).
Step
Step1
Sine Wave
|
+ |
|
+ |
|
+ |
s |
- |
s |
- |
s |
- |
Sine Wave1 |
|
|
|
|
|
Clock |
|
|
|
|
|
Switch |
|
|
Switch1 |
||
Sine Wave2
TL |
|
ir_abc |
Ta |
|
|
|
|
|
A |
m |
is_abc |
B |
|
|
|
m |
|
C |
|
|
|
w m |
|
|
|
|
Asynchronous Dv |
|
|
SI Units |
|
Te |
Machines |
Scope |
|
Measurement |
||
|
||
Demux |
|
|
0 |
|
|
Multimeter |
|
|
|
XY Graph |
Рис. 1.64. Электропривод с модернизированной моделью двигателя (Fig 1_64)
Step
Step1
Sine Wave
|
+ |
|
+ |
|
+ |
s |
- |
s |
- |
s |
- |
Sine Wave1 |
|
|
|
|
|
Clock |
|
|
|
|
|
Switch |
|
|
Switch1 |
||
Sine Wave2
TL |
ir_abc |
|
Ta |
||
|
||
A |
m |
|
B |
is_abc |
|
m |
||
C |
||
w m |
||
|
Asynchronous Dv |
|
|
pu Units |
Te |
|
|
|
|
|
Machines |
Scope |
|
Measurement |
|
|
|
|
|
Demux |
|
0 |
|
|
Multimeter |
|
|
|
|
XY Graph |
Рис. 1.65. Привод с вводом параметров в безразмерной форме (Fig 1_65)
67

Для примера используем двигатель RA112M4 (см. табл. 1.2), введём справочные данные двигателя в программу Fig 1_51 и определим пара метры схемы замещения, требуемые для моделирования двигателя в Si* mulink (рис. 1.66).
|
|
|
0.04667 |
sn |
|
|
|
|
|
0.2624 |
sk |
|
|
|
|
|
1.029 |
c1 |
|
|
|
|
|
4113 |
Pn+dPmax |
|
|
|
|
|
0.5006 |
Rs |
|
|
|
|
|
0.9289 |
Rr |
|
|
|
|
|
0.209 |
Ls=Lr |
|
|
|
|
|
0.005896 |
LIs=LIr |
|
|
|
|
Lm |
0.2031 |
Lm |
In1 |
Out1 |
|
|
0.02904 |
Lls/Lm |
|
|
|
|
|
Lls/Lm |
Parametri shemi |
|
|
|
|
|
|
zamesheniya |
|
|
|
|
In1 |
Out1 |
|
|
Absolutnie |
|
|
|
|
|
|
velichini |
|
|
|
|
1 |
|
|
|
|
|
|
Parametri shemi |
|
|
|
Out1 |
Shema zamesheniya |
zamesheniya |
|
|
||
|
In1 |
|
2 |
|
|
|
|
|
Bazovie znacheniya |
|
|
||
|
|
|
|
|
||
Out2 |
|
Out1 |
|
|
|
|
|
|
|
|
|
|
|
AKZ Parameters |
In2 |
|
310.3 |
Ub |
|
|
|
|
|
|
|
||
|
Bazovie znacheniya |
12.02 |
Ib |
|
|
|
|
314.2 |
wb |
|
|
||
|
|
|
|
|
||
|
|
|
0.02 |
J |
|
|
|
|
|
25.81 |
Rb |
|
|
|
|
|
0.08216 |
Lb |
|
|
|
|
|
0.9876 |
Psib |
In1 |
|
|
|
|
35.62 |
Mb |
||
|
|
|
0.003183 |
tb |
|
Out1 |
|
|
|
26.71 |
|
||
|
|
|
Mn |
|
||
|
|
|
|
|
||
|
|
|
Bazovie znacheniya |
|
In2 |
|
|
|
|
|
|
|
Bezrazmernie |
|
|
|
|
|
|
otnositelnie |
|
|
|
|
|
|
velichini |
310.3 |
|
Ub |
|
||
12.02 |
|
Ib |
|
||
1 |
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
0.06739 |
|
|
|
|
|
0.5006 |
|
Rs |
|
||
0.9289 |
|
Rr |
|
||
0.209 |
|
Ls=Lr |
|
||
0.2031 |
|
Lm |
|
||
0.9718 |
|
kr |
|
||
1.378 |
|
r |
|
||
0.01163 |
|
Ls' |
|
||
0.225 |
|
Tr |
|
||
0.008438 |
|
Ts' |
|
||
50 |
|
1/J |
|
||
26.71 |
|
Mn |
|
||
Absolutnie |
|
|
|
||
velichini |
|
|
4 |
|
|
Absolutnie |
|
|
velichini |
|
|
1 |
|
u |
1 |
|
i |
|
||
1 |
|
0 |
|
||
0 |
|
alfa k |
|
||
0 |
|
0 |
|
||
0.75 |
|
mn |
|
||
0.01939 |
|
rs |
|
||
0.03599 |
|
rr |
|
||
2.543 |
|
xs=xr |
|
||
2.472 |
|
xm |
|
||
0.9718 |
|
|
|
kr |
|
0.05338 |
|
r |
|
||
0.1415 |
|
Xs' |
|
||
70.67 |
|
Tr |
|
||
2.651 |
|
Ts' |
|
||
55.42 |
|
Tm |
|
||
0.07177 |
|
xls=xlr |
|
||
0.0441 |
|
Hs |
|
||
|
|
|
Bezrazmernie otnositelnie velichini
3
Bezrazmernie otnositelnie velichini
Рис. 1.66. Результаты расчета параметров схемы замещения двигателя RA112M4 по программе, приведённой в файле Fig 1_51
В абсолютных единицах для файлов Fig 1_64, Fig 1_65 введённая в
диалоговое окно информация представлена на рис. 1.67.
Результаты моделирования процессов пуска и реверса для обеих схем электропривода представлены на рис. 1.68–1.71. Нагрузка подаёт ся по реактивному входу TL номинального значения.
68

Рис. 1.67. Введённые параметры схемы замещения двигателя RA112M4
|
X: 0. 01199 |
Ɍɨɤ ɜ ɨɛɦɨɬɤɟ ɪɨɬɨɪɚ, Ⱥ |
|
|
|
100 |
Y: 84.43 |
|
|
|
|
0 |
|
|
|
|
X: 0. 221 |
100- |
|
Y: -8. 958 |
|
|
|
|
X: 0. 02165 |
Ɍɨɤ ɜ ɨɛɦɨɬɤɟ ɫɬɚɬɨɪɚ |
|
|
|
100 |
Y: 81.33 |
X: 0.2206 |
|
||
|
|
|
|
|
Y: 10.8 |
0 |
|
|
- 100 |
|
|
200 |
|
ɑɚɫɬɨɬɚ ɜɪɚɳɟɧɢɹ ɪɨɬɨɪɚ, 1/ɫ |
|
|
|
100 |
|
X: 0.2214 |
0 |
|
Y: 152.7 |
|
X: 0.4809 |
|
-100 |
|
|
|
Y: -151.9 |
-200
X:0. 01278
200 |
Y: 167.5 |
|
|
|
|
||
100 |
X: 0.2485 |
X: 0.492 |
|
Y: 26.66 |
|||
|
|||
0 |
|
Y: -26.28 |
|
|
|
-100 |
X: 0. 2523 |
Y:-193.3
-200 
0 |
0.05 |
0.1 |
0.15 |
0.2 |
0.25 |
0.3 |
0.35 |
0.4 |
0.45 |
0.5 |
Рис. 1.68. Результаты моделирования асинхронного электропривода в абсолютных единицах
69
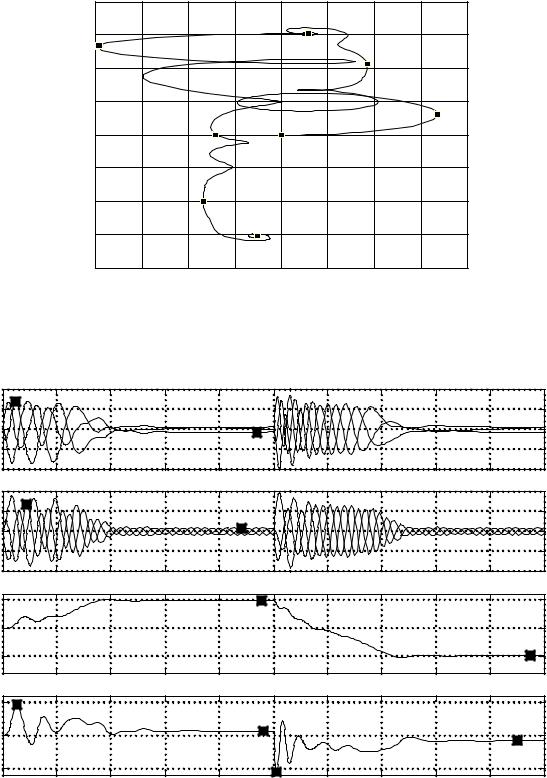
Рис. 1.69. Динамическая механическая характеристика двигателя RA112M4 в абсолютных единицах
10 |
X:0. 01177 |
Ɍɨɤ ɜ ɨɛɦɨɬɤɟ ɪɨɬɨɪɚ, ɨ.ɟ |
Y: 6.999 |
|
|
5 |
|
|
0 |
|
|
- 5 |
|
X: 0. 2346 |
|
Y:-0.7165 |
|
|
|
|
-10 |
|
|
10 |
X: 0. 02148 |
Ɍɨɤ ɜ ɨɛɦɨɬɤɟ ɫɬɚɬɨɪɚ, ɨ.ɟ. |
Y: 6. 754 |
|
|
|
|
5 |
|
|
|
X:0. 2202 |
|
|
|
|
|
|
|
|
Y: 0. 8564 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
-5 |
|
|
|
|
|
|
|
|
|
-10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ɑɚɫɬɨɬɚ ɜɪɚɳɟɧɢɹ, ɨ.ɟ. |
|
|
|
||
0.5 |
|
|
|
X :0.2387 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
Y:0.4852 |
|
|
|
|
|
|
|
|
|
|
|
|
|
X: 0.487 |
|
|
|
|
|
|
|
|
|
|
|
-0.5 |
|
|
|
|
|
|
|
|
Y :-0.4851 |
|
|
|
|
|
|
|
|
|
|
|
X: 0. 01283 |
|
|
Ɇɨɦɟɧɬ ɞɜɢɝɚɬɟɥɹ, ɨ.ɟ. |
|
|
|
||
5 |
Y :4.704 |
|
|
|
|
|
|
|
|
|
|
|
X: 0.2403 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X :0. 4747 |
|
|
|
|
|
Y :0. 748 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
Y: -0.7445 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X :0. 2522 |
|
|
|
|
|
-5 |
|
|
|
Y: -5.44 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0.05 |
0.1 |
0. 15 |
0.2 |
0. 25 |
0.3 |
0.35 |
0.4 |
0.45 ȼɪɟɦɹ,0ɫ.5 |
Рис. 1.70. Результаты моделирования пуска и реверса двигателя RA112M4 в относительных (безразмерных) единицах
70