

Терехин. Учебное пособие
.pdfция необходима для выбора типа контроллера, осуществляющего под готовку информации в цепи обратной связи по частоте вращения.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10/100 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0002s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain3 |
|
|
|
|
|
|
Transfer Fcn7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.66 |
|
|
|
|
|
1 |
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain1 |
|
|
|
|
|
0.00002s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn5 |
|
|
Constant1 |
|
|
|
|
|
|
Step |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Constant |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/0.008 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI |
|
|
|
|
31.11 |
|
|
|
|
1/5.503 |
|
|
|
|
|
|
|
|
|
|
|
|
|
-K- |
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0002s+1 |
|
|
|
0.0123s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain4 |
Integrator |
|
|
|
|
||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Product |
|
|
|
Gain |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI Controller |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn3 |
|
|
Transfer Fcn4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
0.00256s+1 |
|
|
|
|
PI Controller3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10/100 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain6 |
|
|
|
|
|
|
0.0002s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Scope |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.66 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain5 |
|
|
|
|
|
0.00002s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/0.008 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI |
|
|
|
31.11 |
|
|
|
1/5.503 |
|
|
|
|
|
|
|
|
|
|
|
|
|
-K- |
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain7 |
Integrator1 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0002s+1 |
|
|
|
0.0123s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Product1 |
|
|
|
Gain2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI Controller1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn1 |
|
|
Transfer Fcn2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
0.00256s+1 |
|
|
|
|
|
PI Controller4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10/100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Unit Delay1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Quantizer1 |
|
|
|
|
Gain10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
0.66 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Unit Delay |
|
|
Quantizer |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
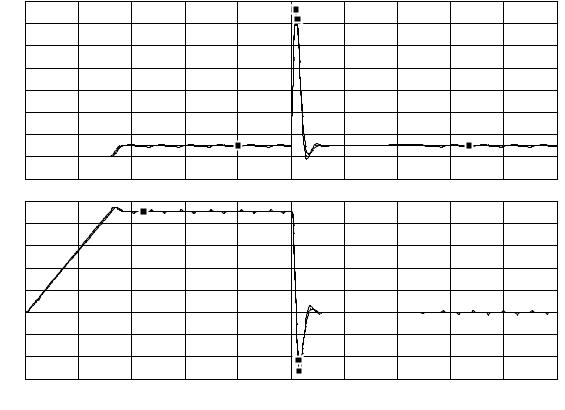
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
1/0.008 |
1 |
|
|
|
31.11 |
1/5.503 |
|
|
s |
|
|
|
|
|
-K- |
|
|||
|
|
PI |
|
|
Integrator2 |
|||
|
PI |
0.0002s+1 |
0.0123s+1 |
|
|
Gain11 |
||
|
|
|
|
|||||
1 |
|
Product2 |
Gain8 |
|
||||
|
PI Controller2 Transfer Fcn16 |
Transfer Fcn17 |
|
|
||||
0.00256s+1 |
PI Controller5 |
|
|
|
||||
|
|
|
|
|
|
|
||
Transfer Fcn12 |
|
|
|
|
|
|
|
|
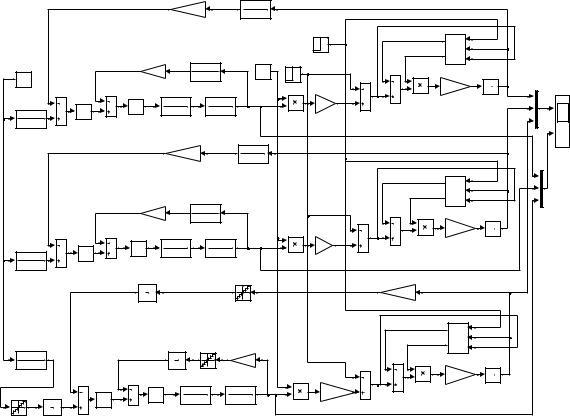
Рис. 4.38. Схема модели контура скорости с тремя настройками (Fig 4_38) |
||||||||
ɜɪɚɳɟɧɢɹ, 1/ɫ |
|
|
|
|
|
|
|
|
ɑɚɫɬɨɬɚ |
|
|
|
|
|
|
|
|
Ɍɨɤɫɬɚɬɨɪɚ Isy, Ⱥ |
|
|
|
|
|
|
|
|
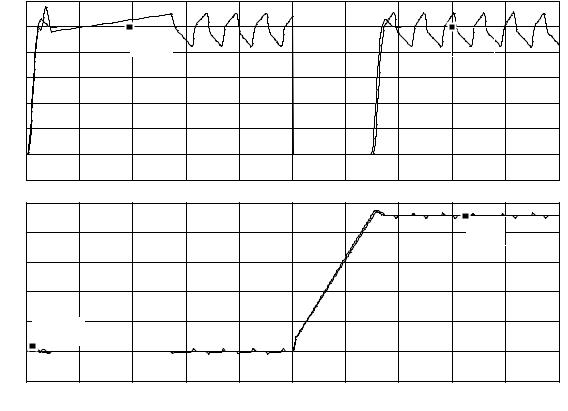
Рис. 4.39. Результаты моделирования контура скорости при ограничении регуляторов тока и скорости (2 контур),
квантования и запаздывании сигналов обратных связей (3 контур)
231
Рис. 4.40. Параметры цепи обратной связи по частоте вращения |
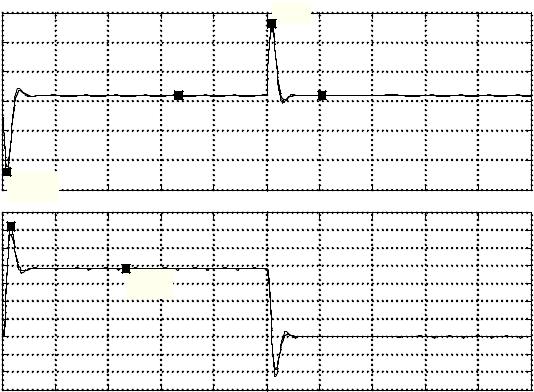
Исследуем поведение контуров при подаче на вход задающего сиг |
нала в 0,01 В (см. рис. 4.41). |
Рис. 4.41. Реакция контура скорости на управление 0,01 В |
232
Это исследование позволяет в принципе ответить на вопрос: спо собна ли спроектированная структура обеспечить работу электропри вода в диапазоне регулирования 1000?
Переходные характеристики 1 и 2 контуров не отличаются друг от друга и представлены одной кривой без пульсаций. Переходная харак теристика 3 контура содержит пульсации и существенно не отличается от переходных характеристик 1 и 2 контуров. Анализ результатов иссле дования приводит к следующим выводам:
•регуляторы не насыщаются и все контуры соответствуют опти мальным настройкам;
•задание уверенно и достоверно отработано (сформирована на вы ходе в среднем частота вращения 0,1 1/с);
|
|
|
|
10/100 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
0.0002s+1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain3 |
|
Transfer Fcn7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tf |
Out1In1 |
TL |
|
|
|
|
|
|
|
|
|
|
|
speed |
||
|
|
|
|
|
|
|
|
|
TL |
|
product(y) |
In2 |
|
|
|
|
|
|
|
|
|
|
Step |
|
Out2In3 |
Te-Ta |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
0.66 |
|
|
1 |
0.8 |
|
|
|
|
Reactiv mom |
|
|
|
|
|
0.00002s+1 |
Ta |
|
|
|
|
|
|||
0.01 |
|
Gain1 |
|
Constant1 |
|
|
|
|
1 |
||||
|
|
|
Transfer Fcn5 |
Step3 |
|
|
|
1/0.008 |
|||||
Constant |
|
|
|
|
|
|
|
|
s |
||||
|
|
|
|
|
|
|
|
|
|
Product3 |
|
||
|
|
|
31.11 |
|
1/5.503 |
|
-K- |
TL |
Gain4 |
Integrator |
|||
|
|
PI |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||
1 |
|
PI |
0.0002s+1 |
|
0.0123s+1 |
Product |
Gain |
|
|
|
|
||
|
PI Controller1 |
Transfer Fcn3 |
Transfer Fcn4 |
|
|
|
|
||||||
0.00256s+1 |
|
|
|
|
|
||||||||
PI Controller |
|
|
|
|
|
|
|
|
|
|
|
||
Transfer Fcn9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
Ta |
|
|
|
Scope |
|
|
|
|
|
10/100 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
TL |
|
|||
|
|
|
|
|
0.0002s+1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Gain6 |
|
Transfer Fcn8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Out1In1 |
|
|
|
|
|
|
|
|
|
|
|
|
product(y) |
In2 |
|
|
|
|
|
|
|
|
|
|
|
|
Out2In3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.66 |
|
|
1 |
|
|
Ta |
|
|
Reactiv mom1 |
|
|
|
|
|
0.00002s+1 |
|
|
|
|
|
|
|||
|
|
Gain5 |
|
|
|
|
|
|
|
|
|||
|
|
|
Transfer Fcn6 |
|
|
|
|
|
1/0.008 |
1 |
|||
|
|
|
|
|
|
|
|
|
|
s |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31.11 |
|
1/5.503 |
|
-K- |
|
Product4 |
Gain7 |
Integrator1 |
||
|
|
PI |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||
1 |
|
PI |
0.0002s+1 |
|
0.0123s+1 |
Product1 |
Gain2 |
|
|
|
|
||
|
PI Controller5 |
Transfer Fcn1 |
Transfer Fcn2 |
|
|
|
|
||||||
0.00256s+1 |
|
|
|
|
|
||||||||
PI Controller3 |
|
|
|
|
|
|
|
|
|
|
|
||
Transfer Fcn10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
10/100 |
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Quantizer1 |
|
|
|
|
|
|
|
|
|
Unit Delay1 |
|
|
|
|
|
Gain10 |
TL |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Tf |
Out1In1 |
TL |
|
|
|
|
|
|
|
|
|
|
|
speed |
||
|
|
|
|
|
|
|
|
|
|
|
|
In2 |
|
|
|
|
|
|
|
|
|
|
|
|
product(y) |
|
|
|
|
|
|
|
|
|
|
|
|
|
Out2In3 |
Te-Ta |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
1 |
|
|
0.66 |
|
Ta |
|
|
Reactiv mom2 |
|
0.00256s+1 |
|
|
z |
|
|
|
|
|
|
|
|||
|
|
Quantizer |
Gain12 |
|
|
|
|
|
1 |
||||
Transfer Fcn12 |
|
Unit Delay |
|
|
|
|
1/0.008 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
31.11 |
|
1/5.503 |
|
-K- |
|
Product5 |
Gain11 |
Integrator2 |
|
|
PI |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
1 |
PI |
|
0.0002s+1 |
0.0123s+1 |
Product2 |
Gain8 |
|
|
|
|
||
|
PI Controller2 |
Transfer Fcn16 |
Transfer Fcn17 |
|
|
|
|
||||||
|
z |
|
|
|
|
|
|||||||
Quantizer2 |
PI Controller4 |
|
|
|
|
|
|
|
|
|
|
|
|
Unit Delay2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.42. Схема модели, учитывающая действие любого момента |
||||||||||||
|
|
сопротивления: активного и реактивного (Fig 4_42) |
|||||||||||
•возмущение в виде номинальной активной нагрузки приводит к уменьшению частоты вращения до отрицательного значения, так как момент нагрузки активный. Частота вращения за счёт дей ствия ПИ регулятора скорости восстанавливается на заданном уровне;
233
•запаздывание и квантование сигнала обратной связи по частоте вращения начинает проявляться, но существенного влияния не оказывает. Будем считать, что эти параметры цепи обратной связи по частоте вращения могут быть приняты за основу.
Введём в Fig 4_38 моделирование реактивного момента сопротив
ления. Схема усложнённой модели представлена на рис. 4.42. Исследуем пуск на малую частоту вращения без нагрузки с после
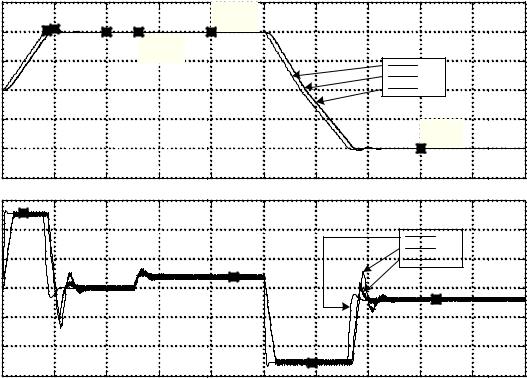
дующим наложением нагрузки реактивного характера TL (см. рис. 4.43).
Рис. 4.43. Пуск на малую скорость с последующим наложением реактивной нагрузки
Отметим, что отрицательная скорость при воздействии реактив ной нагрузки не появляется. Из нижней диаграммы следует, что ско рость начинает восстанавливаться при достижении тока статора стати ческого тока нагрузки. На рис. 4.43 более четко представлено влияние квантования и запаздывания сигнала обратной связи (характеристика с пульсациями). Кроме того, введено квантование и запаздывание вход ного сигнала.
Проведём исследование пуска двигателя на малую скорость с реак тивным моментом нагрузки номинального значения с последующим
234
сбросом нагрузки до нулевого уровня. Результаты моделирования пред ставлены на рис. 4.44.
Разгон двигателя начинается при выполнении условия: текущее значение электромагнитного момента должно достичь заданного мо мента реактивной нагрузки. Это произошло в момент времени чуть бо лее 0,03 с. Двигатель разогнался на заданную скорость 0,1 1/с. Как и прежде, переходные режимы без пульсаций относятся к 1 и 2 контурам (они сливаются в одну кривую), характеристики с пульсациями при надлежат третьему контуру.
Рис. 4.44. Моделирование пуска при нагрузке реактивного характера на малую скорость с последующим сбросом до нулевого значения
При сбросе нагрузки частота вращения увеличивается до значения 1,243 1/с в реакции 1 и 2 контуров и – до значения 1,328 1/с в реакции 3 контура. По истечении времени 0,05 с частота вращения восстанавли вается до заданного значения 0,1 1/с.
Проведём моделирование при этих же условиях, но с активным моментом нагрузки (см. результаты исследования на рис. 4.45). Выве дем на второй вход осциллографа индикацию момента (картинки по моменту и току различаются только масштабом, качественно они соот ветствуют друг другу.
235
При сравнении с рис. 4.44 следует указать на принципиальное раз личие процесса пуска. В первом случае (воздействие реактивного мо мента сопротивления) привод начинает пускаться, когда текущее зна чение тока (электромагнитного момента) достигнет заданного значе ния на входе и превысит это значение. Так как момент реактивный, то работу он не может производить.
1/ɫ |
1. 5 |
|
|
||
, |
1 |
|
ɜɪɚɳɟɧɢɹ |
||
0.5 |
||
ɑɚɫɬɨɬɚ |
||
0 |
||
|
-0.5
-1
-1. 5
, ɇɦ |
14 |
|
12 |
||
ɷɥɟɤɬɪɨɦɚɝɧɢɬɧɵɣ |
||
10 |
||
|
||
|
8 |
|
|
6 |
|
|
4 |
|
Ɇɨɦɟɧɬ |
2 |
|
0 |
||
|
- 2 - 4 - 6
X: 0.102
Y : 1.32
X :0. 06649 |
X: 0. 1208 |
Y : 0. 1012 |
Y: 0. 1012 |
X : 0. 001674
Y:-1.205
X:0. 003294
Y:12. 41
X: 0. 04679
Y :7.
0 |
0.02 |
0. 04 |
0.06 |
0. 08 |
0.1 |
0. 12 |
0.14 |
0. 16 |
0.18 ȼɪɟɦɹ,ɫ0.2 |
Рис. 4.45. Моделирование пуска при нагрузке активного характера на малую скорость с последующим сбросом до нулевого значения
Во втором случае момент активный, он сразу начинает производить работу. Так как в нулевой момент времени действует активный момент но минального значения, а текущее значение электромагнитного момента двигателя составляет нулевое значение, то двигатель под действием актив ного момента начинает разгоняться в отрицательном направлении. В это же время растёт электромагнитный момент двигателя в соответствии со своими инерционностями. Как только момент двигателя сравняется с ак тивным моментом сопротивления, разгон двигателя в отрицательном на правлении прекращается и при дальнейшем росте момента двигателя при ращение частоты вращения меняет знак и начинается процесс пуска в нуж ном направлении. Скорость достигает нулевого значения и далее становит ся положительной. Сброс нагрузки протекает одинаково в обоих случаях.
236

|
4.5.3. Исследование влияния способа реализации |
||||||||||
|
|
источника тока (инвертора) |
|
|
|
||||||
Рассмотрим три реализации источника тока: аналоговая, импульс |
|||||||||||
ная с широтно импульсным управлением и импульсная с релейным |
|||||||||||
управлением. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10/100 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
0.0002s+1 |
|
|
|
|
|
|
|
|
|
|
Gain3 |
Transfer Fcn7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TL |
Tf |
Out1In1 |
TL |
|
|
|
|
|
|
|
|
speed |
|||
|
|
|
|
|
|
|
|
TL |
product(y) |
In2 |
|
|
|
|
|
|
|
|
Step |
|
Out2In3 |
Te-Ta |
|
|
|
|
|
|
|
|
|
|
|||
|
|
0.66 |
1 |
0.8 |
|
|
|
Reactiv mom |
|
||
|
|
|
|
|
|
|
|
||||
|
Gain1 |
0.00002s+1 |
1 |
|
Ta |
|
|
|
|||
|
Transfer Fcn5 |
Constant1 |
Step3 |
Ta |
|
1/0.008 |
1 |
||||
|
|
|
|
|
|
s |
|||||
Step6 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Product3 |
|
Integrator |
|
|
|
|
|
31.11 |
1/5.503 |
|
-K- |
|
Gain4 |
||
|
PI |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
1 |
PI |
|
|
0.0002s+1 |
0.0123s+1 |
Product |
Gain |
|
|
|
|
PI Controller1 |
|
Transfer Fcn3 |
Transfer Fcn4 |
|
|
|
|
||||
0.00256s+1 |
|
|
|
|
|
|
|||||
PI Controller |
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn9 |
1 |
|
|
|
|
|
|
10/100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Quantizer3 |
|
|
|
|
|
|
|
Unit Delay3 |
|
|
|
|
|
Gain6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
TL |
|
Scope |
|
|
|
|
|
|
|
|
|
|
Out1In1 |
|
|
|
|
|
|
|
|
|
|
product(y) |
In2 |
|
|
|
|
|
|
|
|
|
|
Out2In3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
0.66 |
|
|
|
|
Reactiv mom1 |
|
z |
|
|
|
|
|
|
|
|
|
||
0.00256s+1 |
|
|
Quantizer5 |
Gain5 |
2 |
|
|
|
|
1 |
|
Unit Delay5 |
|
|
|
|
1/0.008 |
||||||
Transfer Fcn8 |
|
|
|
|
|
|
|
Ta |
|
s |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Product4 |
|
Integrator1 |
|
|
|
|
|
|
1/5.503 |
|
-K- |
|
Gain7 |
||
|
PI |
Signal(s) Pulses |
|
|
|
|
|||||
|
|
|
|
|
|
||||||
1 |
PI |
|
|
|
0.0123s+1 |
Product1 |
Gain2 |
|
|
|
|
PI Controller5 |
|
|
|
Transfer Fcn2 |
|
|
|
||||
z |
|
|
Discrete |
|
|
|
|
||||
PI Controller3 |
|
|
|
|
|
|
|
|
|
||
Quantizer4Unit Delay4 |
|
PWM Generator |
|
|
|
|
|
|
|
||
|
1 |
|
|
|
10/100 |
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
Quantizer1 |
Gain10 |
|
|
|
TL |
|
|
|||
|
Unit Delay1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Tf |
Out1In1 |
TL |
|
|
|
|
|
|
|
|
|
speed |
||
|
|
|
|
|
|
|
|
|
|
In2 |
|
1 |
|
|
|
|
|
|
|
|
product(y) |
|
|
|
|
|
|
|
|
|
|
Out2In3 |
Te-Ta |
||
0.00256s+1 |
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
Reactiv mom2 |
|
|
Transfer Fcn12 |
|
|
|
0.66 |
|
|
|
|
|
||
z |
|
|
|
|
|
|
|
|
|
||
|
|
|
Quantizer |
Gain12 |
|
|
|
|
|
1 |
|
|
Unit Delay |
|
|
3 |
|
|
|
1/0.008 |
|||
|
|
|
|
|
|
|
|
Ta |
|
s |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Product5 |
|
Integrator2 |
|
|
|
|
|
|
1/5.503 |
|
-K- |
|
Gain11 |
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
1 |
PI |
|
|
0.0123s+1 |
Product2 |
Gain8 |
|
|
|
||
Relay |
|
Transfer Fcn17 |
|
|
|
||||||
z |
|
|
|
|
|
||||||
PI Controller2 |
|
|
|
|
|
|
|
|
|
|
|
Quantizer2 Unit Delay2 |
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.46. Исследование влияния способов реализации источника тока |
|||||||||||
На рис. 4.46 представлена модель с тремя контурами скорости, каждый из которых содержит указанную выше реализацию: 1 контур с аналоговой реализацией (будем называть его эталонным), 2 контур – импульсный с ШИМ управлением, 3 контур – импульсный с релейным управлением. Чтобы обеспечить сравнительный визуальный анализ, эти контуры объединены в одну схему модели. Наблюдение за переход ными характеристиками осуществляется с помощью 2 входового ос циллографа: по первому входу наблюдается частота вращения, по вто рому – электромагнитный момент двигателя.
Максимальный момент, развиваемый асинхронным двигателем при максимальном токе 15,13 А, необычайно велик и составляет 50,9 Н.м.
Произведём исследование пуска реверса на малую скорость (рис. 4.47). Характеристики (data 1) относятся к первому контуру, data 2 – ко второму и data 3 – к третьему.
237

Рис. 4.47. Результаты моделирования управления частотой вращения при различных способах реализации инвертора (источника тока)
Задаётся частота вращения 0,1 1/с, пуск на положительное напра вление вращения производится с реактивным моментом сопротивле ния номинального значения 7,66 Н.м, сброс нагрузки в момент време ни 0,06 с. Реверс вхолостую в момент времени 0,1 с.
Анализ полученных результатов моделирования приводит к следу ющим выводам:
•во втором и третьем контурах появились пульсации момента и часто
ты вращения. Пульсации момента для обоих вариантов достаточно большие (около 3 Н.м), что на частоте 2500 Гц приведёт к повышен ной шумности в работе. Пульсации частоты вращения по сравнению с уровнем 0,1 1/с незначительны и ими можно пренебречь;
•характер отработки управления и возмущения (сброс нагрузки) незначительно отличается от эталона. Несколько предпочтитель ней выглядит применение инвертора с релейным управлением. Однако опасность работы инвертора с переменной частотой ком мутации может оказаться существенной.
Для сравнения рассмотрим результаты моделирования пуска на
малую частоту вращения без нагрузки с последующим наложением ре активной нагрузки номинального значения, в заключение – реверс с нагрузкой (рис. 4.48).
238

1/ɫ |
ɑɚɫɬɨɬɚ ɜɪɚɳɟɧɢɹ, |
ɗɥɟɤɬɪɨɦɚɝɧɢɬɧɵɣ ɦɨɦɟɧɬ, ɇɦ |
Рис. 4.48. Результаты моделирования управления частотой вращения при |
различных способах реализации инвертора (пуск без нагрузки с последующим |
наложением реактивной нагрузки, реверс под реактивной нагрузкой) |
Как и ранее, data 1 – переходные характеристики 1 канала, data 2 – 2 го канала, data 3 – третьего канала.
Полученные в результате моделирования характеристики соответ ствуют эталону, за исключением начала пуска. Наиболее существенно отклонение по второму каналу. Это обусловлено переходным процес сом установления нулевого значения тока в контуре тока при симме тричном управлении инвертором. Оба способа реализации можно ис пользовать на практике при проектировании широкорегулируемых электроприводов переменного тока.
На рис. 4.49 представлены результаты моделирования контура ско рости при управлении в «большом».
Как и ранее, data 1 – переходные характеристики 1 канала, data 2 – 2 го канала, data 3 – третьего канала.
Сравнительный анализ показывает, что реальные источники тока обеспечивают максимальный момент 50,9 Н.м, заданная частота вра щения 100 1/с формируется чётко, наброс номинальной нагрузки при водит к провалу частоты вращения примерно на 1 1/с с восстановлени ем до заданного значения, реверс под нагрузкой прошёл успешно с пе ререгулированием не более 5 %.
239
1/ɫ |
150 |
|
|
||
, |
100 |
|
ɜɪɚɳɟɧɢɹ |
||
50 |
||
ɑɚɫɬɨɬɚ |
||
0 |
||
|
||
|
-50 |
|
|
-100 |
|
-150 |
||
, ɇɦ |
60 |
|
|
||
ɦɨɦɟɧɬ |
40 |
|
|
||
ɗɥɟɤɬɪɨɦɚɝɧɢɬɧɵɣ |
20 |
|
0 |
||
|
||
|
-20 |
|
-40
-60
X: 0. 01723 |
X: 0. 02003 |
X: 0. 04006 |
|
Y: 104.9 |
|||
Y : 101.7 |
Y: 100 |
||
|
X: 0. 05206
Y : 99.11
X:0.0081
Y:51.42
0 |
0.02 |
0.04 |
0.06 |
X:0. 07986
Y:100
data1
data2
data3
X: 0. 1601
Y: -100
data1
data2
data3
X : 0.0885
Y: 7. 627
X: 0. 1661
Y: -7. 667
X:0. 1186
Y:-51. 03
0.08 |
0.1 |
0.12 |
0. 14 |
0.16 |
0. 18 |
0.2 |
ȼɪɟɦɹ, ɫ
Рис. 4.49. Результаты моделирования управления частотой вращения при различных способах реализации инвертора (пуск без нагрузки
на большую скорость с последующим наложением реактивной нагрузки, реверс под реактивной нагрузкой)
По динамическим свойствам следует отметить более повышенную степень колебательности привода с источником с широтно импульс ной модуляцией. И это справедливо, так как привод с источником ре лейного управления не содержит в своей структуре регулятор тока.
На рис. 4.50 продемонстрированы результаты моделирования кон тура скорости в «большом» с изменённым алгоритмом управления на грузкой.
Задание на управление и возмущения отработаны чётко. Импульс ные источники тока показывают, как и прежде, примерно одинаковые показатели.
Следует отметить, что при управлении в «большом» необходимо подобрать уровень ограничения интегратора регулятора скорости. В противном случае динамические характеристики контура скорости могут оказаться неудовлетворительными. При этом необходимо подоб рать минимальный уровень ограничения интегратора, при котором ин тегральные свойства регулятора скорости в целом не нарушаются. Ка ких либо теоретических разработок и рекомендаций в этом русле нет.
240