

Терехин. Учебное пособие
.pdf0.66 |
|
1 |
|
|
|
0.00002s+1 |
|
||
Gain |
|
|
||
|
Transfer Fcn2 |
|
||
|
|
|
||
PI |
|
31.11 |
1/5.503 |
|
|
|
|
||
10 |
0.0002s+1 |
0.0123s+1 |
||
PI Controller4 |
Transfer Fcn |
Transfer Fcn1 |
||
Constant |
|
|
Scope |
|
|
|
|
||
0.66 |
1 |
|
||
0.00002s+1 |
||||
Gain1 |
|
|||
|
Transfer Fcn5 |
|||
|
|
|||
PI |
|
31.11 |
1/5.503 |
|
|
0.0002s+1 |
0.0123s+1 |
||
PI Controller1 |
|
|||
Transfer Fcn3 |
Transfer Fcn4 |
|||
1 |
|
|
0.66 |
|
z |
|
|
||
|
Quantizer |
Gain2 |
||
Unit Delay |
||||
PI |
|
31.11 |
1/5.503 |
|
|
0.0002s+1 |
0.0123s+1 |
||
PI Controller3 |
|
|||
|
Transfer Fcn6 |
Transfer Fcn7 |
||
Рис. 4.13. Схема модели исследования влияния насыщения, |
||||
квантования по уровню и времени (Fig 4_13) |
||||
Рис. 4.14. Результаты исследования контура тока |
||||
при максимальном сигнале управления |
||||
211

Существенное влияние оказывает насыщение регулятора на уров не 10 В, а также влияние оказывает уровень ограничения выходного на пряжения интегратора регулятора. Приемлемые результаты получены при выборе ограничения интегратора на уровне 3 В (см. рис. 4.15).
Рис. 4.15. Настройка уровня ограничения регулятора тока
Особого внимания заслуживает исследование влияния квантова ния сигнала обратной связи по уровню и времени. Исследование влия ния квантованию по уровню даёт ответ на вопрос: с каким форматом слова по разрядности необходимо применить контроллер при цифро вом управлении. При исследовании влияния квантования по времени совместно с задержкой управления на это время позволит оценить тре буемое быстродействие применяемого контроллера для цифрового управления. Результаты моделирования приведены для настроек бло ков Quantizer и Unit Delay, показанных на рис. 4.16.
Таким образом, цифровая управляющая система (контроллер) должна обеспечить с периодом в 20 мкс подачу информации в цепь об ратной связи через 12 разрядный ЦАП.
Исследуем реакцию контура на «малое» управление в виде сигнала 0,01 В. Результаты моделирования приведены на рис. 4.17.
Анализ показывает, что ограничение регулятора не влияет на реак цию контура, а квантование вносит погрешность в процесс управле ния. Это исследование позволяет сделать вывод о применении цифро вых средств разрядностью не ниже 12. И эти выводы в значительной степени справедливы при проектировании электроприводов с диапазо ном регулирования 1000 и выше.
212

|
|
Рис. 4.16. Настройки блоков Quantizer и Unit Delay |
|
||||||
016 |
|
|
|
|
|
|
|
|
|
014 |
|
|
|
|
|
|
|
|
|
012 |
|
|
|
|
Ɉɩɬɢɦɢɡɢɪɨɜɚɧɧɵɣ ɤɨɧɬɭɪ |
|
|
||
|
|
|
|
|
|
|
|||
0.01 |
|
|
|
Ɉɝɪɚɧɢɱɟɧɢɟ ɪɟɝɭɥɹɬɨɪɚ |
|
|
|
||
|
|
|
|
|
|
|
|||
0.008 |
|
|
|
|
|
|
|
|
|
|
|
|
Ɉɝɪɚɧɢɱɟɧɢɟ ɪɟɝɭɥɹɬɨɪɚ, ɤɜɚɧɬɨɜɚɧɢɟ |
|
|
|
|||
0.006 |
|
|
|
|
|
|
|
|
|
0.004 |
|
|
|
|
|
|
|
|
|
0.002 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0.009 ȼɪɟɦɹ,0ɫ.01 |
0 |
0.001 |
0.002 |
0.003 |
0.004 |
0.005 |
0.006 |
0.007 |
0.008 |
|
|
Рис. 4.17. Реакция контура тока на «малое» управление |
||||||||
213

Второй важный вывод состоит в том, что при «малом» управлении оптимальные свойства различных реализаций подтверждаются.
Третий вывод свидетельствует о том, что преобразователь частоты с такими свойствами реализовать невозможно, но на этом этапе проек тирования решена задача определения параметров регулятора тока и сформирован некоторый эталон, к которому необходимо приближать практические реализации.
4.3.3. Исследование влияния реальных свойств преобразователя частоты на статические и динамические свойства контура тока
Проведём имитационные исследования контура тока с управлени ем преобразователем частоты по широтно импульсному способу на не сущей частоте и с релейным управлением с переменной частотой, близ кой к несущей. Именно в этом состоит основной смысл имитационно го моделирования, а не в проверке выводов, сделанных Кесслером.
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.66 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Unit Delay |
|
|
|
Quantizer |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI |
|
|
|
|
|
|
|
|
|
|
|
31.11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/5.503 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
10 |
|
|
|
|
|
|
|
|
|
|
|
PI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0002s+1 |
|
|
|
|
|
|
|
|
|
|
0.0123s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Controller2 |
|
|
|
|
|
Transfer Fcn6 |
|
|
|
|
|
|
|
|
|
Transfer Fcn7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
Constant2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Scope |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.66 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Unit Delay1 |
|
|
|
|
Quantizer1 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Signal(s) Pulses |
|
|
|
|
|
|
|
|
1/5.503 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
PI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0123s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Controller |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Discrete |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PWM Generator |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.66 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain3 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Unit Delay2 |
|
|
|
|
|
|
|
|
Quantizer2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/5.503 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0123s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Relay |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
Рис. 4.18. Схемы моделей контура тока
с различными реализациями преобразователя частоты (Fig 4_18)
214

На рис. 4.18 показаны схемы моделей контура тока в трёх реализа циях: с идеальным преобразователем частоты (эталон) – первый кон тур схемы модели; с управлением преобразователя по широтно им пульсному закону – второй контур; с релейным законом управления – третий контур.
Цепи обратной связи всех контуров одинаковы, параметры регу лятора тока соответствуют расчётным оптимальным значениям. Пара метры регулятора при релейном управлении показаны на рис. 4.19 и выбраны таким образом, чтобы частота коммутации примерно соответ ствовала частоте несущей при широтно импульсном управлении 2500 Гц. Ширина гистерезиса принята ±0,2 В (при максимальном сигнале управления ±10 В), выходной сигнал (сигнал преобразователя частоты) двухпозиционный ±311,1 В.
Рис. 4.19. Параметры двухпозиционного релейного регулятора
Для управления по широтно импульсному закону используем блок из состава библиотеки Simulink – Discrete PWM Generator с некоторым изменением. Ввод параметров этого блока показан на рис. 4.20. Выби раем управление однофазным мостом преобразователя, вводим значе ние несущей частоты преобразователя 2500 Гц (при максимальной ча стоте выбранного типа преобразователя 3000 Гц), рекомендуемый ин тервал моделирования этого блока 5–6 с оставляем без изменения.
215

Рис. 4.20. Окно ввода параметров однофазного широтно*импульсного преобразователя
Максимальная амплитуда входного сигнала ±10 В, амплитуда вы ходных импульсов ±311,1 В.
Результаты моделирования реакции каждого контура на входной сигнал 10 и 1 В сведены для сравнения на одну диаграмму (рис. 4.21, 4.22).
Анализ полученных результатов моделирования позволяет утвер ждать, что контуры тока с реальными преобразователями выполнили по ставленную задачу: на выходе сформирован ток со средним значением 15,2 А. Амплитуда пульсаций не превышает 5 % и составляет 0,7...0,8 А, частота пульсаций с ШИМ – 2500 Гц, для релейного управления чуть ме нее 2500 Гц. При входном воздействии 1 В регуляторы не насыщаются, быстродействие стало оптимальным, реальные преобразователи отрабо тали оптимальное быстродействие и формально можно утверждать, что с релейным преобразователем качество управления улучшилось (время переходного процесса уменьшилось и перерегулирование исчезло).
Принимаем такую реализацию контура тока (с преобразователя ми) при проектировании контуров управления потоком и скоростью.
216

16
Isx, Ⱥ |
14 |
|
ɫɬɚɬɨɪɚ |
|
|
|
|
|
Ɍɨɤ |
12 |
|
|
|
|
|
10 |
|
|
8 |
|
|
6 |
|
|
4 |
|
|
2 |
|
|
0 |
0 |
|
|
|
|
|
X : 0. 00581 |
|
X : 0. 007663 |
|
|
|
|
|
|
|
Y: 15.57 |
X : 0. 007011 |
|
|
|
|
|
|
|
|
Y : 15.2 |
Y : 15.5 |
X : 0. 008366 |
|
|
|
|
|
|
X : 0. 00436X : 0. 005011 |
|
|
X: 0. 009046 |
||
|
|
|
|
Y : 14.64 Y : 14.69 |
|
|
Y : 14.76 Y : 14.67 |
|
|
|
|
|
|
|
Ɉɝɪɚɧɢɱɟɧɢɟ ɪɟɝɭɥɹɬɨɪɚ, ɤɜɚɧɬɨɜɚɧɢɟ, |
|
|||
|
|
|
|
|
ɢɞɟɚɥɶɧɵɣ ɩɪɟɨɛɪɚɡɨɜɚɬɟɥɶ |
|
|
||
|
|
|
|
Ɉɝɪɚɧɢɱɟɧɢɟ ɪɟɝɭɥɹɬɨɪɚ, ɤɜɚɧɬɨɜɚɧɢɟ, |
|
||||
|
|
|
|
|
ɩɪɟɨɛɪɚɡɨɜɚɬɟɥɶ ɫ ɒɂɆ |
|
|
||
|
|
|
|
Ɉɝɪɚɧɢɱɟɧɢɟ ɪɟɝɭɥɹɬɨɪɚ, ɤɜɚɧɬɨɜɚɧɢɟ, |
|
||||
|
|
|
|
|
ɪɟɥɟɣɧɵɣ ɩɪɟɨɛɪɚɡɨɜɚɬɟɥɶ |
|
|
||
0.001 |
0.002 |
0.003 |
0.004 |
0.005 |
0.006 |
0.007 |
0.008 |
0.009 |
0.01 |
|
|
|
|
|
|
|
|
ȼɪɟɦɹ, ɫ |
|
Рис. 4.21. Результаты моделирования реакции контура тока |
|
||||||||
|
|
на входной сигнал 10 В |
|
|
|
|
|||
Рис. 4.22. Результаты моделирования реакции контура тока |
|
||||||||
|
|
|
на входной сигнал 1 В |
|
|
|
|
||
217


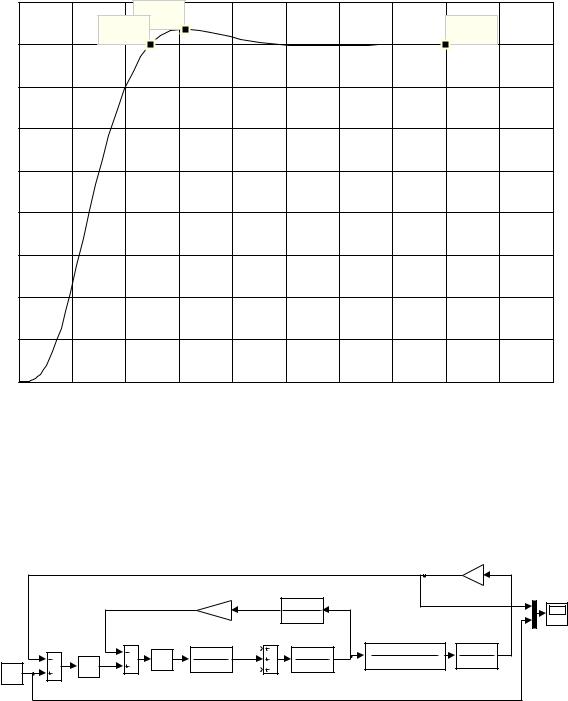
Рис. 4.25. Оптимизированный переходный процесс в контуре потока |
С целью упрощения процедуры обработки полученных результа тов моделирования, можно представить переходный процесс в машин ных единицах (вольтах). Тогда схема эксперимента принимает вид, по казанный на рис. 4.26.
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
Koc2 |
|
|
|
0.66 |
|
|
1 |
|
|
|
|
|
|
|
0.00002s+1 |
Isx |
|
|
|
|
|
Koc1 |
|
|
|
||
|
|
|
|
|
Filtr1 |
|
Scope |
|
|
|
|
|
|
|
|
||
|
|
PI |
31.11 |
Usx |
|
1/5.503 |
0.9344*3.233*0.165 |
1 |
|
|
|
|
|
|
|||
|
PI |
0.0002s+1 |
|
|
0.0123s+1 |
0.165s+1 |
0.0002s+1 |
|
|
|
|
|
|||||
10 |
Current |
|
|
Transfer Fcn |
Filtr2 |
|||
Flux |
Transfer Fcn |
|
Sum12 |
Transfer Fcn |
||||
|
PI Controller |
|
Flux |
|
||||
Flux |
Invertor |
|
|
Current |
|
|||
PI Controller |
|
|
|
|
|
|
|
|
|
Рис. 4.26. Видоизменённая схема исследования контура потока |
|||||||
Результаты моделирования в машинных единицах (В) представле ны на рис. 4.27.
220