

Терехин. Учебное пособие
.pdfАнализ выражений (4.14) позволяет сделать следующие заключения:
1)управление электроприводом осуществляется путём задания тока статора по соответствующим осям. По оси x задаётся ток, опреде ляющий поток ротора, по оси y – ток, определяющий момент дви гателя. Кроме того, текущие значения тока по оси у и потока рото ра определяют совместно с частотой вращения ротора частоту пре образователя, питающего двигатель (4.9);
2)для придания проектируемому приводу свойств привода постоян ного тока эти составляющие тока статора iSx и iSy не должны изме няться при воздействии поступающих при работе двигателя возму щений;
3)такими свойствами структура, представленная на рис. 4.1 не обла дает.
Реализация режима источника тока в автономном инверторе осу
ществляется введением дополнительных контуров управления с аста тическими регуляторами, на вход которых подается разность задающе го сигнала и сигнала с датчика реального тока двигателя.
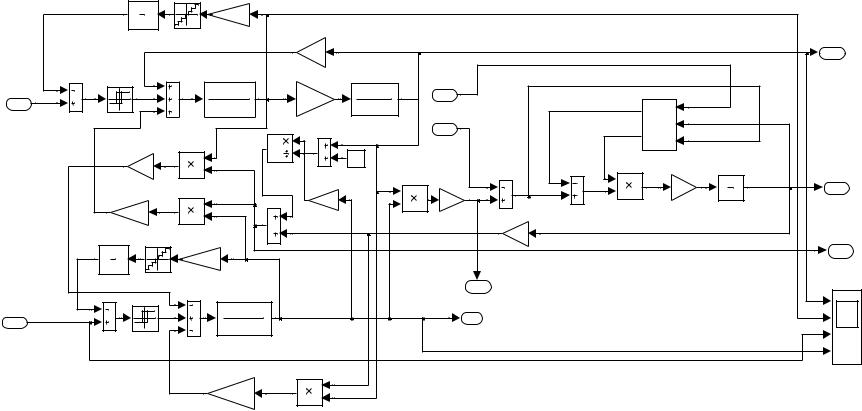
На рис. 4.2 показана разработанная структура асинхронного двига теля с векторным управлением с применением преобразователя часто ты с широтно импульсной модуляцией. В отличие от структуры на рис. 4.1 введён контур тока с реальным преобразователем. Причём кон тур тока присутствует на осях х и у, задание на работу двигателя посту пает в токовой форме. Поэтому такое управление называют частотно токовым. Все возмущения, действующие в реальном двигателе и опи санные системой уравнений (4.14), в структуре учтены.
На рис. 4.3 демонстрируется структура с релейным управлением тока. Все особенности математического описания (4.14) также учтены.
На обоих структурах предусмотрена возможность исследования работы двигателя с любым характером нагрузки (с реактивным TL и ак тивным моментом Та сопротивления).
Для оптимизации процессов векторного управления асинхронным двигателем необходимо спроектировать два управляющих контура: по током и скоростью с внутренними подчинёнными контурами тока.
На рис. 4.4 представлена структура контура формирования пото косцепления (магнитного потока) ротора.
Структура включает два контура: внешний (главный) контур пото ка и внутренний (подчинённый) контур тока. Управление процессом формирования тока статора во вращающейся системе координат по оси х ведёт регулятор тока Current PI Controller. Ток в контуре ISx созда
201

|
|
|
|
|
1 |
|
0.66 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain5 |
|
|
Kr/Tr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Unit Delay6 Quantizer6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
-K- |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Flux |
1 |
|
|
PI |
Signal(s)Pulses |
|
1/5.503 |
|
|
-K- |
|
0.165 |
2 |
|
|
|
|
|
TL |
|
|
|
|
|
|
0.0123s+1 |
|
|
0.165s+1 |
TL |
|
|
Tf |
Out1In1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
i*x |
S5 |
Current |
Discrete |
|
|
|
|
|
|
|
speed |
|
|
||||||||
S1 |
Transfer Fcn |
|
kR*Rr |
|
Transfer Fcn1 |
4 |
|
|
|
In2 |
|
|
|
||||||||
|
|
PI Controller PWM Generator |
|
|
|
product(y) |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
Out2In3 |
|
Te-Ta |
|
|
|||||||
|
|
|
|
|
L's |
|
|
|
|
|
|
|
Ta |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
-C- |
|
|
|
|
Reactiv mom |
|
|
|
||
|
|
|
|
|
-K- |
|
|
|
Product4 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
S2 |
Constant |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Product1 |
|
|
|
|
|
|
|
|
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-K- |
|
2 |
||||
|
|
|
|
|
|
|
wk |
|
|
-K- |
|
-K- |
|
|
Product6 |
|
s |
Speed |
Speed |
||
|
|
|
|
|
|
|
|
|
|
|
|
S8 |
1/J |
Integrator |
|||||||
|
|
|
|
|
-K- |
|
|
|
|
kR*Rr |
Product5 |
|
S4 |
|
|||||||
|
|
|
|
|
|
|
|
|
kR*p*1.5 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
L's |
Product2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
202 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|||
|
|
|
1 |
|
|
0.66 |
|
S7 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Freq |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Gain6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Unit Delay1Quantizer1 |
|
|
|
|
|
4 |
MomentTe |
|
|
|
|
|
|
|
||||
3 |
|
|
PI |
|
Signal(s)Pulses |
|
|
1/5.503 |
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0123s+1 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Current |
|
|
|
|
|
|
|
|
||||
i*y |
|
S6 |
Current |
Discrete |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Transfer Fcn2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
S3 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
PI Controller1 |
PWM Generator1 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Scope |
|
|
|
|
|
|
|
0.9344 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kR |
|
Product3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.2. Структура асинхронного двигателя с векторным управлением с применением преобразователя частоты |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
с широтно*импульсной модуляцией (Fig 4_2) |
|
|
|
|
|
|
|||||||
|
|
|
1 |
|
|
0.66 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain5 |
|
Kr/Tr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Unit Delay6Quantizer6 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
-K- |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Flux |
1 |
|
|
|
|
|
1/5.503 |
|
-K- |
0.165 |
2 |
|
|
|
|
|
TL |
|
|
|
|
|
|
|
0.0123s+1 |
|
0.165s+1 |
TL |
|
|
Tf |
Out1In1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
i*x |
S5 |
Relay |
|
|
|
|
|
|
|
speed |
|
|
||||||
S1 |
Transfer Fcn |
|
kR*Rr |
Transfer Fcn1 |
4 |
|
|
|
In2 |
|
|
|
||||||
|
|
|
|
|
|
|
product(y) |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Out2In3 |
|
Te-Ta |
|
|
||
|
|
|
|
|
|
|
|
|
|
Ta |
|
|
|
|
|
|||
|
|
|
L's |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
-C- |
|
|
|
|
Reactiv mom |
|
|
|
||
|
|
|
-K- |
|
|
|
Product4 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
S2 |
Constant |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Product1 |
|
|
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
wk |
|
|
|
|
|
|
|
-K- |
|
2 |
||||
|
|
|
|
|
|
|
-K- |
-K- |
|
|
Product6 |
|
s |
Speed |
Speed |
|||
|
|
|
|
|
|
|
|
|
|
|
Integrator |
|||||||
|
|
|
-K- |
|
|
|
|
kR*Rr |
|
S4 |
S8 |
1/J |
|
|||||
|
|
|
|
|
|
|
|
Product5 |
kR*p*1.5 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
L's |
Product2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|||
203 |
|
1 |
|
|
0.66 |
S7 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
Freq |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Gain6 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Unit Delay1Quantizer1 |
|
|
|
4 |
MomentTe |
|
|
|
|
|
|
|
||||
3 |
|
|
|
|
|
1/5.503 |
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0123s+1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Current |
|
|
|
|
|
|
|
|
|||
i*y |
|
S6 |
Relay1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Transfer Fcn2 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
S3 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Scope |
|
|
|
|
|
|
0.9344 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kR |
Product3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.3. Структура асинхронного двигателя с векторным управлением с применением преобразователя частоты |
||||||||||||||||||
|
|
|
|
|
|
|
|
с релейным управлением (Fig 4_3) |
|
|
|
|
|
|
|
|||
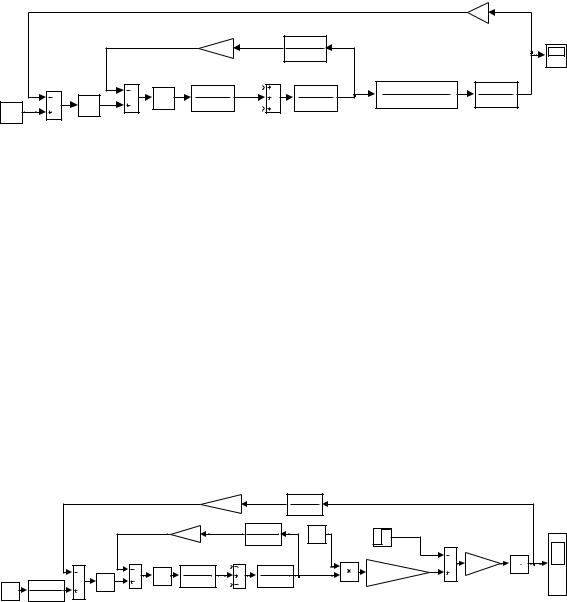
ётся с помощью управляемого преобразователя (инвертора), предста вленного идеальным (непрерывным) апериодическим звеном первого порядка. Силовая часть двигателя, введённая в контур тока Transfer Fcn Current, представлена апериодическим звеном первого порядка с по стоянной времени T'S. Цепь обратной связи содержит фильтр Filtr1.
Впрямой цепи контура тока показан сумматор Sum12, через который вводятся возмущения, действующие от реального электропривода.
Врасчётной схеме возмущения исключены в предположении компен сации их при использовании астатического управления.
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
Koc2 |
|
|
|
0.66 |
|
|
1 |
|
|
|
|
|
|
|
0.00002s+1 |
Isx |
|
|
|
|
|
Koc1 |
|
|
|
||
|
|
|
|
|
Filtr1 |
|
Scope |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
PI |
31.11 |
Usx |
|
1/5.503 |
0.9344*3.233*0.165 |
1 |
|
|
|
|
|
|
|||
|
PI |
0.0002s+1 |
|
|
0.0123s+1 |
0.165s+1 |
0.0002s+1 |
|
|
|
|
|
|||||
8 |
Current |
|
|
Transfer Fcn |
Filtr2 |
|||
Flux |
Transfer Fcn |
|
Sum12 |
Transfer Fcn |
||||
|
PI Controller |
|
Flux |
|
||||
Flux |
Invertor |
|
|
Current |
|
|||
PI Controller |
|
|
|
|
|
|
|
Рис. 4.4. Структура контура управления магнитным потоком (Fig 4_4)
Внешний контур управляется регулятором потока Flux PI Control* ler. Выходной сигнал регулятора является входным для контура тока. Формирование магнитного потока в структуре асинхронного двигателя осуществляется апериодическим звеном первого порядка Transfer Fcn Flux с постоянной времени Tr. В прямую цепь контура потока введён фильтр Filtr2 в предположении, что в реальном электроприводе поток будет вычисляться, так как прямого доступа к этому параметру нет.
Данная структура смоделирована в Simulink и представлена в фай ле Fig 4_4. В модель введены параметры, полученные ниже, и при жела нии можно наблюдать оптимальный процесс управления потоком.
Структура контура управления частотой вращения ротора предста влена на рис. 4.5.
|
|
|
|
|
|
10/100 |
|
1 |
|
|
|
|
|
|
|
|
|
|
0.0002s+1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Koc3 |
|
Filtr32 |
|
|
|
|
|
|
|
|
|
|
0.66 |
|
1 |
0.8 |
|
|
|
|
|
|
|
|
|
0.00002s+1 |
|
|
|
|
|||
|
|
|
|
Koc1 |
Flux |
|
|
|
|
|||
|
|
|
|
|
Filtr1 |
Tn |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Usy |
|
Isy |
|
1/0.008 |
1 |
|
|
|
|
|
|
31.11 |
1/5.503 |
|
s |
wm |
|||
|
|
|
PI |
|
0.9344*3*1.5 |
|
||||||
|
|
|
|
|
|
|
Integrator |
|||||
|
|
PI |
|
0.0002s+1 |
|
0.0123s+1 |
|
Te |
1/J |
|
||
|
|
|
|
|
|
|
||||||
|
1 |
Current |
|
|
|
Product |
|
|
||||
10 |
0.00256s+1 |
Speed |
|
Transfer Fcn |
Sum13 |
Transfer Fcn |
|
GainTe |
|
|
|
|
|
PI Controller |
Invertor |
|
Current |
|
|
|
|
Scope |
|||
Speed |
Filtr31 |
PI Controller |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
Рис. 4.5. Структура контура управления скоростью (Fig 4_5)
204
Структура включает два контура: внешний (главный) контур ско рости и внутренний (подчинённый) контур тока. Управление процес сом формирования тока статора во вращающейся системе координат по оси у ведёт регулятор тока Current PI Controller. Ток в контуре ISу соз даётся с помощью управляемого преобразователя (инвертора), пред ставленного идеальным (непрерывным) апериодическим звеном пер вого порядка. Силовая часть двигателя, введённая в контур тока Tran* sfer Fcn Current, представлена апериодическим звеном первого порядка с постоянной времени TS'. Цепь обратной связи содержит фильтр Filtr1.
Впрямой цепи контура тока показан сумматор Sum13, через который вводятся возмущения, действующие от реального электропривода.
Врасчётной схеме возмущения исключены в предположении компен сации их при использовании астатического управления. В отличие от контура потока характер возмущений другой, требующий запаса на пряжения от инвертора.
Внешний контур управляется регулятором скорости Speed PI Con* troller. Выходной сигнал регулятора является входным для контура то ка. Электромагнитный момент Te создаётся током ISу после умножения его на поток и коэффициент Gain Te. Для упрощения структуры поток введён в виде номинального значения. Формирование частоты враще ния в структуре асинхронного двигателя осуществляется интегральным звеном Integrator с постоянной времени J. В прямую цепь контура ско рости введён фильтр Filtr31, оптимизирующий переходный процесс в структуре при ступенчатом управлении. В цепь обратной связи контура скорости введён фильтр Filtr32 в предположении, что в реальном элек троприводе частота вращения будет вычисляться при безсенсорном управлении, либо формироваться от цифрового датчика положения.
Данная структура смоделирована в Simulink и представлена в фай ле Fig 4_5. В модель введены параметры, полученные ниже, и при жела нии можно наблюдать оптимальный процесс управления частотой вра щения.
Рассмотренные структуры (рис. 4.4 и 4.5) приняты для расчёта и оптимизации.
205

4.3.Оптимизация и имитационное исследование
вSimulink контура тока
4.3.1. Расчёт параметров регулятора тока при идеальном источнике тока
Расчётная схема контура тока показана на рис. 4.6.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Koc1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Isx |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tf1.s+1 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Koc1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Filtr1 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Usx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI |
|
|
|
|
Ki |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/R |
|
|
|
|
|
|
|
|
||
|
Uz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ti.s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ts'.s+1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Current |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Scope |
||||||
|
|
|
|
|
|
|
|
|
|
|
Transfer Fcn |
|
Sum12 Transfer Fcn |
||||||||||||||||||||||||||||||
Current |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
PI Controller |
|
Invertor |
|
|
|
|
|
|
|
|
|
|
|
|
Current |
|
|
|
|
|
|
|||||||||||||||||
Рис. 4.6. Структурная схема контура тока
Контур содержит идеальный инвертор с передаточной функцией:
|
|
|
|
W |
= |
KI |
, |
|
|
|
|
|
|
||||
|
|
|
|
TFI (s ) |
TI s +1 |
|||
|
|
|
|
|
||||
где KI = |
Uôm |
= |
220 2 |
= 31,11 |
– коэффициент усиления инвертора; |
|||
U y max |
10 |
|||||||
|
|
|
|
|
|
|||
–
US = Uф√2 – модуль пространственного вектора фазного напряжения ста тора; Uymax = 10 B – максимальное напряжение управления инверто
ром; |
T = 0,5 |
1 |
= 0,5 |
1 |
= 0,0002 ñ – постоянная времени инверто |
|
|
||||
|
I |
fi |
|
2500 |
|
|
|
|
|
ра; fi = 2500 Гц – несущая частота (коммутации) инвертора (см. табл. 4.1).
WTFI (s ) |
= |
|
KI |
|
= |
31,11 |
. |
(4.15) |
|
TI |
s +1 |
0,0002s +1 |
|||||||
|
|
|
|
|
|||||
Нагрузка инвертора представлена эквивалентным сопротивлени ем статорной обмотки R = 5,503 Ом и эквивалентной постоянной вре мени TS' = 0,0123 c (см. табл. 4.3).
Передаточная функция нагрузки (цепи обмотки статора):
W |
= |
1/ R |
|
= |
1/ 5,503 |
. |
(4.16) |
|
|
||||||
TFÑ (s ) |
T 's s +1 |
|
0,0123s +1 |
|
|||
|
|
|
|||||
206

Передаточная функция фильтра Filtr1:
WF1(s) = |
1 |
|
= |
1 |
, |
(4.17) |
|
Tf 1s |
+1 |
0,00002s +1 |
|||||
|
|
|
|
где Tf1 = 0,00002 c – постоянная времени фильтра, которая соответству ет периоду опроса данных о реальном токе 40 мкс.
Коэффициент обратной связи по току был вычислен ранее и равен:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Koc1 = 0,66. |
|
|
|
|
|
|
|
|
|
(4.18) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.66 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Isx |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.00002s+1 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Koc1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Filtr1 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Usx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI |
|
|
|
31.11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1/5.503 |
|
|
|
|
|
|
|
|
|
|
||
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0002s+1 |
|
|
|
|
|
|
|
|
|
|
|
0.0123s+1 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
Current |
Transfer Fcn |
|
|
|
|
|
|
|
|
|
|
Transfer Fcn |
|
|
Scope |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Sum12 |
|
|
|||||||||||||||||||||||||||||
Current |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
PI Controller |
|
Invertor |
|
|
|
|
|
|
|
|
|
|
|
Current |
|
|
|
|
|
|
|
||||||||||||||||
Рис. 4.7. Схема модели контура тока (Fig 4_7)
Расчёт параметров регулятора тока (рис. 4.7) произведём по мо дульному оптимуму [8]. Все необходимые условия выполнены.
При одной большой постоянной времени рекомендуется примене ние пропорционально интегрального регулятора с передаточной функ цией вида:
Wðåã(s) = êðåã |
Òèç s +1 |
= 7,492 |
0,0123 s +1 |
, |
(4.19) |
|||||||
|
Òèç s |
|
0,0123 s |
|
||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
êðåã = |
Ts'R |
|
|
= |
|
|
0,0123 5,503 |
|
= 7,492; |
|
||
Tì1ak KI |
Koc1 |
0,00022 2 31,11 0,66 |
|
|||||||||
|
|
|
|
|
||||||||
TS' = Tиз = 0,0123 c – большая постоянная времени, равная времени изо дрома Tиз; Tμ1 = TI + Tf1 = 0,0002 + 0,00002 = 0,00022 c – эквивалентная малая постоянная времени контура тока; ak = 2 – коэффициент опти мизации.
Таким образом, рассчитав все параметры контура тока (4.15–4.19), разработаем модель в Simulink и представим её на рис. 4.7.
Модель реализована на элементах библиотеки Simulink, за исклю чением регулятора тока Current PI Controller, схема модели которого от крывается по команде Look Under Mask и показана на рис. 4.8.
207

P |
|
|
|
Proportional |
|
Saturation |
|
1 |
I |
1 |
|
s |
|||
|
|
In_1 |
Gain |
Integrator |
|
|
Scope |
|
1 |
Saturation1 |
Out_1 |
|
|
Sum |
|
Edit Scope
Рис. 4.8. Схема модели ПИ*регулятора
Параметры регулятора вносятся через диалоговое окно, откры вающееся при двойном щелчке по изображению регулятора (рис. 4.9).
Рис. 4.9. Окно ввода параметров ПИ*регулятора
В строку Proportional заносится коэффициент усиления регулятора κрег, в строку Izodrom – время изодрома Tиз, коэффициент усиления ин тегратора I = κрег/Tиз вычисляется при инициализации регулятора. Limit Out, Limit Int – параметры, устанавливающие уровень ограничения вы ходного напряжения и интегратора регулятора. Параметры введены за ведомо большого значения, чтобы исключить насыщения и обеспечить работу регулятора в линейном режиме.
Блок Current задаёт ток преобразователя (инвертора). Ток задаётся
в виде напряжения. Для установленных параметров задающему напря
–
жению в ±10 В соответствует ток статора по осям ±15,13 А=10,7√2. Проведём исследование спроектированного контура в линейном
режиме без ограничения выходных напряжений регулятора. Для этого вызывается файл Fig 4_7 и осуществляется моделирование при задаю щем сигнале 10 В (рис. 4.10).
208
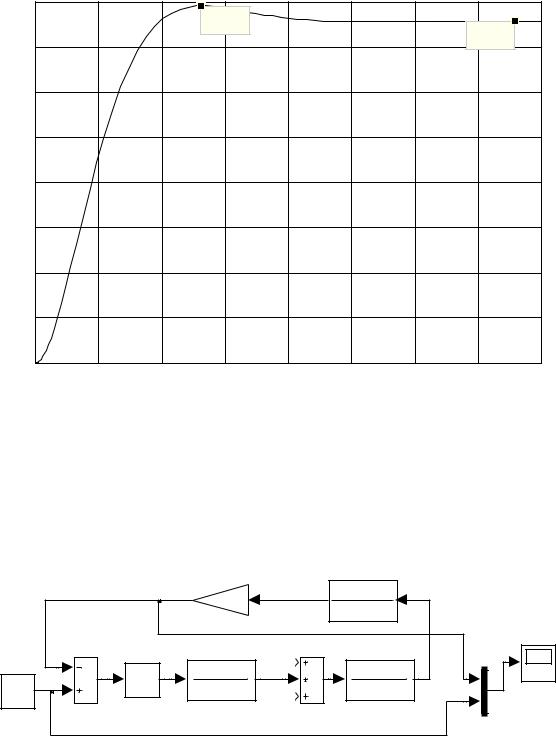
Рис. 4.10. Оптимизированный переходный процесс в контуре тока |
С целью упрощения процедуры обработки полученных результа тов моделирования можно представить переходный процесс в машин ных единицах (вольтах). Тогда схема эксперимента принимает вид, по казанный на рис. 4.11.
|
|
0.66 |
|
1 |
|
|
|
|
0.00002s+1 |
Isx |
|
|
|
Koc1 |
|
||
|
|
|
Filtr1 |
|
|
|
|
|
|
|
|
|
|
31.11 |
Usx |
1/5.503 |
|
|
PI |
|
|
||
10 |
0.0002s+1 |
|
0.0123s+1 |
Scope |
|
Current |
|
||||
Current |
Transfer Fcn |
Sum12 |
Transfer Fcn |
|
|
PI Controller |
Invertor |
|
Current |
|
Рис. 4.11. Видоизменённая схема исследования контура тока
Результаты моделирования в машинных единицах (В) представле ны на рис. 4.12.
209

Рис. 4.12. Переходный процесс в контуре тока в (В) |
Имеющиеся в Simulink инструменты обработки диаграмм позволя ют с наименьшими затратами времени и с большой наглядностью по лучить нужные результаты. Например, по диаграмме на рис. 4.12 после использования инструмента определения координаты нужной точки, располагаемой на расчётной кривой, следует, что перерегулирование составляет 4,4 % при теоретическом значении 4,3 % [8]. Строго говоря, на этот результат влияет фильтр. Этот результат свидетельствует о том, что расчёт параметров регулятора произведён правильно. Какие то де тальные исследования соответствия полученных результатов рекомен дациям Кесслера не имеют смысла, если Вы убедились в правильности разработанного контура. Необходимые данные, если они требуются для дальнейшего проектирования, можно взять из табл. 2.2, приведён ной в [8].
4.3.2. Исследование влияния насыщения регулятора, квантования сигнала токовой обратной связи по уровню и времени
Схема имитационной модели исследования в Simulink показана на рис. 4.13.
На диаграмме (рис. 4.14) показаны результаты исследования влия ния настройки некоторых параметров контура при максимальном за дающем сигнале 10 В.
210