

Терехин. Учебное пособие
.pdf1 |
|
|
|
|
|
|
|
TL |
|
|
Integrator |
|
|
|
|
|
|
|
|
|
|
||
2 |
ia |
Te |
-K- |
1 |
w |
|
FCEM |
ia |
|
|
s |
|
|
1 |
|
|
|
|
|
E fcem |
|||
|
|
|
|
|
|
|
|
|
|
|
Coulomb (Tf) & |
|
|
|
|
|
|
|
Viscous ( Bm*w) |
|
|
|
|
|
|
|
Friction Torques |
|
|
|
|
3 |
If |
Laf |
|
|
|
|
|
20e-6s+1 |
|
|
|
|
|
||
if |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
ia |
|
|
|
|
|
|
|
If |
|
2 |
|
|
|
|
|
Te |
|
m |
|
|
|
|
|
|
Mux |
|
|
|
Рис. 1.5. Структура блока Mechanics |
|
|
|||
Блок с передаточной функцией W(s) = Laf/(20e – 6s + 1) реализует постоянную по эдс KE = LafIf. При вводе параметров двигателя в указан ных в диалоговом окне размерностях (рис. 1.2) постоянные по эдс и мо менту равны: KE = KT. Поэтому первый блок умножения формирует электромагнитный момент двигателя TE = LafIfIa = KTIa, а второй блок умножения – противоЭДС двигателя E = LafIfω = KEω.
Частота вращения вычисляется путем интегрирования уравнения движения электропривода
TE −TL −Tf −Bm ω = J ddtω .
Раскроем блок Coulomb (Tf) и представим его на рис. 1.6.
1 |
offset |
1 |
In1 |
Sign |
Out1 |
|
|
|
|
gain |
|
Рис. 1.6. Схема модели реактивного момента
Блоки Sign и offset по мнению авторов приложения Simulink призва ны моделировать реактивный момент сопротивления. Однако это реше ние не предусматривает, при нулевом значении частоты вращения, запрет нарастания частоты вращения при моменте двигателя меньшем, чем ре
11
активный момент сопротивления, задаваемый параметром offset. Поэтому при использовании библиотечной модели двигателя рекомендуется эти блоки удалить. Усилительный блок с параметром gain = Bm моделирует процесс формирования момента сопротивления по выражению Tm = Bmω.
Блок мультиплексора Mux объединяет выходные переменные дви гателя: частоту вращения ω, ток обмотки якоря (двигателя) Ia, ток об мотки возбуждения If и электромагнитный момент двигателя в одну шину m. Это сделано для упрощения виртуального изображения двига теля в SimPowerSystems.
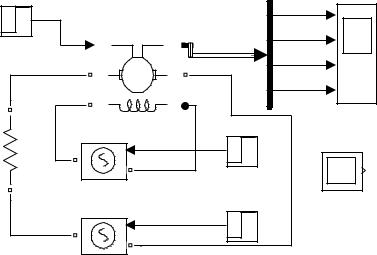
Для примера рассмотрим модель пуска двигателя. Ограничение пускового тока достигается введением резистора в цепь обмотки якоря. Схема модели показана на рис. 1.7. Источники питания обмотки воз буждения и обмотки якоря выбраны управляемыми, чтобы можно бы ло с помощью блока Step реверсировать или изменять величину по стоянного напряжения.
Step2 |
TL |
|
m |
|
|
A+ |
dc |
A- |
|
|
F+ |
|
F- |
Scope |
|
|
|
|
|
|
DC Machine |
|
|
|
|
+ |
s |
|
|
|
- |
Step1 |
0 |
|
|
|
|||
Controlled Voltage Source1 |
Multimeter |
|||
|
|
|
|
|
|
+ |
s |
|
|
|
- |
Step |
|
|
|
|
|
||
Controlled Voltage Source
Рис. 1.7. Модель пуска и реверса двигателя постоянного тока (Fig 1_7)
На выходах демультиплексора действуют сигналы частоты враще ния, тока двигателя, тока обмотки возбуждения и электромагнитного момента. Прибор Scope фиксирует изменение во времени подаваемых на его входы сигналов и строит диаграммы (осциллограммы). Блок Multimeter не используется, но ввести его рекомендует программа Simu* link, иначе моделирование запрещено.
Введённые параметры двигателя показаны на рис. 1.8.
Откроем файл Fig 1_7, который находится в папке «Пособие». На рис. 1.9 показан рабочий стол в Simulink с открытым файлом. Время мо делирования выбрано 2 с. Время моделирования вводится в окно, ря дом с которым находятся кнопки «Стоп» и «Пуск» моделирования.
12

Рис. 1.8. Параметры двигателя в файле Fig 1_7
Рис. 1.9. Рабочий стол Simulink
Параметры системы, обеспечивающие процесс моделирования, задаются в диалоговом окне при выборе в главном меню процедуры Si* mulation и команды ConFiguration Parameters (рис. 1.10) [1, 2].
Рекомендуется начать исследования с использованием численного метода ode 15s. Остальные параметры по умолчанию. Прибор Scope по зволяет одновременно наблюдать изменение частоты вращения, тока, тока возбуждения и момента двигателя. Прибор XY Graph формирует статическую механическую характеристику двигателя по динамиче ским характеристикам частоты вращения и момента. Блок Step задаёт напряжения на обмотке якоря двигателя: +240 В во времени 0...1 с и
13
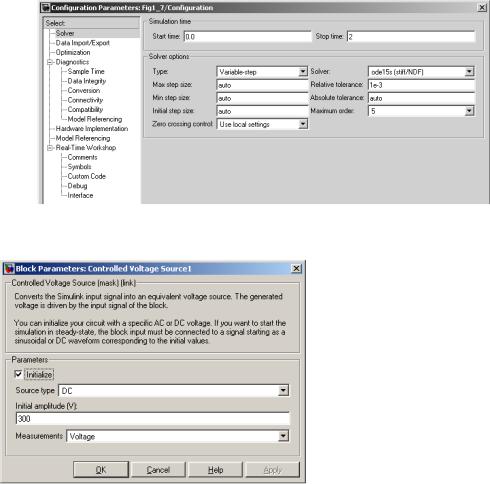
–240 В от 1 до 2 х с. Блок Step 1 задаёт напряжение на обмотке возбуж дения 300 В. Заметим, что здесь возможны два результата. Если для ис точника обмотки возбуждения установлено напряжение (см. рис. 1.11), то настройки блока Step 1 не воспринимаются и ток возбуждения при нулевом времени действует установившегося значения.
Рис. 1.10. Параметры системы моделирования
Рис. 1.11. Настройка источника обмотки возбуждения
Если флажок в окне Initialize убран, то начальное значение тока возбуждения равно нулю и после протекания переходного процесса устанавливается ток, обусловленный напряжением, заданным в блоке Step 1. Блок Step 2 задаёт активный момент нагрузки TL, равный, напри мер, 5НМ.
Рассмотрим моделирование процессов пуска и реверса при задан ном начальном значении тока возбуждения.
Запускаем процесс моделирования нажатием кнопки в виде зачер нённого треугольника. После окончания моделирования прослушива ется звуковое предупреждение, затем двойным щелчком открывается лицевая панель осциллографа Scope (рис. 1.12).
14
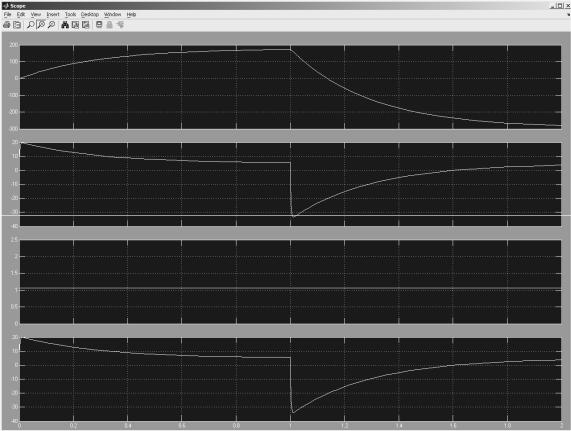
Рис. 1.12. Результаты моделирования
Для того, чтобы обеспечить доступ к редактированию полученной диаграммы, необходимо после моделирования выполнить в командном окне Matlab команды:
set(0,'ShowHiddenHandles','On') set(gcf,'menubar','Fig ure')
На верхней части диаграммы появляется главное меню и возмож ность редактирования (см. рис. 1.12). Выбирается в меню View команда Property Editor и устанавливаются необходимые свойства диаграммы: надписи, цвет фона, цвет и толщина линий осциллограмм.
После редактирования необходимо выйти из команды Property Edi* tor. Для оцифровки нужных точек осциллограмм в меню Tools выбрать команду Data Cursor. На курсоре появляется перекрестие, с помощью которого назначается координата обрабатываемой точки. Но прежде необходимо разрешить произвольный выбор нужной координаты. Двойным щелчком правой кнопки мыши открывается динамическое меню, в котором выбирается команда Selection Style и назначается вы бор позиции мышью (Mouse Position). После оцифровки выбранной точки нужно разрешить обработку следующей точки, вызвав динами
15

ческое меню и выбрав команду Create Now Datatip. По окончании про цесса оцифровки закрыть команду Data Cursor.
Рис. 1.13. Отредактированная диаграмма пуска и реверса двигателя
Следует отдельно указать на возможность нанесения надписей на русском языке. Для того чтобы кириллица воспринималась, необходи мо заменить кодовую страницу 1252 на 1251:
•в меню Пуск открыть команду Выполнить. В открывшемся окне набрать regedit и выполнить; открывается путь к кодовым страни цам: HKLM (HKey Lokal Masine) \ System \ Current Control Set \ NLS \ Code Page;
•открыть страницу 1252 и изменить запись С 1252 на С 1251.
Для исполнения произведённой записи необходимо перегрузить
компьютер.
Результаты моделирования, представленные в виде диаграммы на рис. 1.12, после редактирования выглядят, например, как рис. 1.13.
В первую очередь отметим, что ток возбуждения в начале модели рования соответствует установившемуся значению. В реальных приво дах постоянного тока порядок включения таков, что сначала подаётся напряжение на обмотку возбуждения, а потом запускается двигатель в работу. Пуск двигателя осуществляется через токоограничивающий ре
16
зистор. Пусковой ток достигает значение 19,4 А и снижается по мере разгона двигателя до значения 5,457 А (следует иметь в виду, что теоре тически процесс пуска ещё не закончился). Частота вращения достигла величины 171,4 1/с.
В момент времени, соответствующей одной секунде, произведен реверс путем изменения полярности напряжения на обмотке якоря. Ток двигателя меняет знак на противоположный и достигает значения –33,29 А. Начинается процесс интенсивного уменьшения частоты вра щения (торможения) двигателя. Двигатель разгоняется до частоты вра щения –278,4 1/с, и ток достигает величины +3,545 А. Это свидетель ствует о том, что момент нагрузки TL, действующий на двигатель, име ет активный характер и переводит двигатель в режим генераторного торможения. Отрицательная частота вращения двигателя значительно превышает абсолютное значение положительной частоты вращения.
Одновременно с окончанием моделирования появляется лицевая панель графопостроителя XY Graph. После выполнения в командном окне указанных ранее команд появляется главное меню графопостро ителя и открывается доступ к редактированию полученной диаграммы.
Выбирается в меню View команда Property Editor, и устанавливают ся необходимые свойства диаграммы: надписи, цвет фона, цвет и тол щина линии осциллограммы. Но сначала следует установить масштабы по осям. Наиболее целесообразно выполнить установку масштабов по осям X и Y автоматически. Для этого на закладке X Axis окна Property Editor (рис. 1.14) поставить флаг на строке X Limit Auto, на закладке Y Axis – флаг на строке Y Limit Auto. Статические характеристики прини мают вид, как на рис. 1.14.
После редактирования диаграммы средствами Property Editor и внесения дополнения в виде номеров точек, с помощью программы Microsoft Visio 11, диаграмма принимает вид, представленный на рис. 1.15. Характерные точки оцифрованы. Рассмотрим отдельные участки полученной диаграммы.
Участок 1, 2 соответствует процессу нарастания момента до значе ния 19,76 Н.м, причем и частота вращения изменилась до 5,912 1/с. Участок 2, 3 соответствует статической механической характеристике двигательного режима на условное направление движения «вперёд». Двигатель достиг частоты вращения 172,2 1/с при моменте 5,564 Н.м. Характеристика линейна, наклон определяется суммарным сопротив лением цепи обмотки якоря.
17
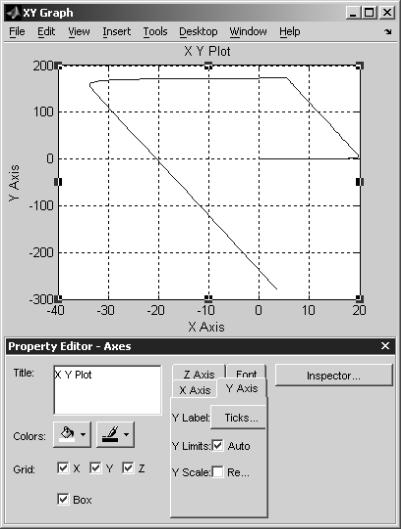
Рис. 1.14. Статические характеристики двигателя постоянного тока в различных режимах работы
Участок 3, 4 соответствует переходу двигателя на работу в режим противоточного торможения. Двигатель включен «назад», но вращает ся ещё «вперёд». Участок механической характеристики 4, 5 заканчива ется при нулевой частоте вращения (т. 5) и является продолжением (участок 5, 6) механической характеристики двигательного режима при работе «назад». Этот участок демонстрирует полный вид механической характеристики: момент короткого замыкания (пусковой) составляет примерно 20,45 Н.м, а частота вращения идеального холостого хода – 237,9 1/с. Участок 6, 7 является продолжением механической характе ристики (5, 6) и представляет механическую характеристику режима ге нераторного торможения. Абсолютное значение частоты вращения в т. 7 (279,9 1/с) больше частоты вращения идеального холостого хода, так как момент нагрузки двигателя активный и раскручивает двигатель
18

до скорости, на которой достигается равенство моментов двигателя и нагрузки. Двигатель работает в режиме генератора и отдаёт энергию, например для зарядки аккумулятора. Таким образом, на полученной диаграмме отразились почти все возможные режимы работы двигателя (кроме режима динамического торможения).
|
200 |
|
|
|
|
X: 5.554 |
|
|
|
|
|
|
|
Y: 172.2 |
|
1/ɫ |
150 |
4 |
|
|
|
3 |
|
X: -33.62 |
|
|
|
|
|||
, |
|
Y: 160.8 |
|
|
|
|
|
ɜɪɚɳɟɧɢɹ |
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
ɑɚɫɬɨɬɚ |
|
|
|
|
|
X: 19.76 |
|
|
|
X: -20.45 |
|
|
|
||
|
|
|
|
|
Y: 5.912 |
||
|
|
Y: 0.1911 |
|
|
|
||
0 |
|
|
|
|
|
||
|
5 |
|
1 |
|
2 |
||
|
|
|
|
||||
|
|
|
|
|
|||
|
-50 |
|
|
|
|
|
|
|
-100 |
|
|
|
|
|
|
|
-150 |
|
|
|
|
|
|
|
-200 |
|
|
|
|
X: 0.01102 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y: -237.9 |
|
|
-250 |
|
|
|
6 |
X: 3.618 |
|
|
|
|
|
|
|
Y: -279.9 |
|
|
-300 |
|
|
|
|
7 |
|
|
-30 |
-20 |
-10 |
0 |
10 |
20 |
|
|
-40 |
||||||
|
|
|
|
|
|
Ɇɨɦɟɧɬ ɞɜɢɝɚɬɟɥɹ, ɇɦ |
|
Рис. 1.15. Отредактированная диаграмма статических характеристик
Рассмотрим моделирование процессов пуска и реверса при на чальном нулевом значении тока возбуждения. Отличием в настройках модели (Fig 1_7) является отсутствие флажка в строке Initialize окна на стройки блока источника напряжения возбуждения (рис. 1.16).
Рис. 1.16. Окно настройки источника напряжения возбуждения
19
На рис. 1.17 показано окно настройки блока Step 1, задающее вели чину напряжения возбуждения.
Рис. 1.17. Окно настройки блока Step 1
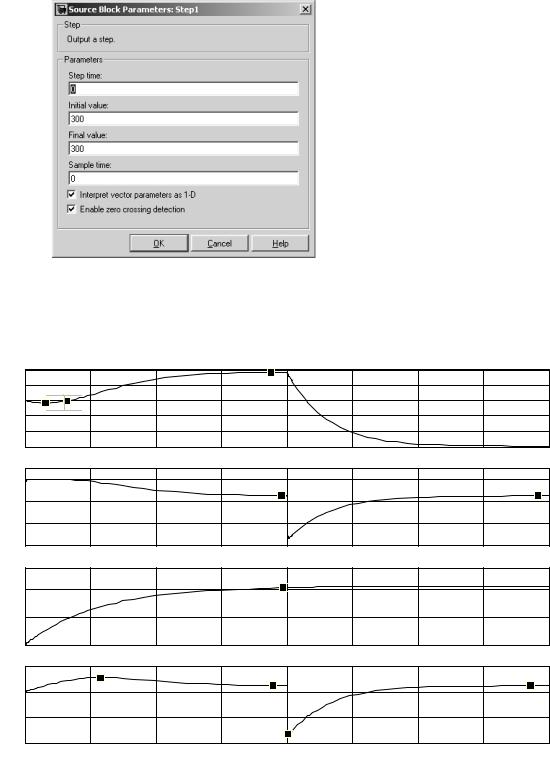
На рис. 1.18 показан переходный процесс пуска двигателя при ну левых начальных значениях частоты вращения и тока возбуждения двигателя.
200 |
X: 0.1563 |
|
|
100 |
X: 1.877 |
||
Y: -14.71 |
|||
Y: 182.4 |
|||
|
|
0 |
X: 0.3209 |
|
-100 |
|
|
Y: -0.8291 |
|
|
-200 |
|
|
|
|
|
-300 |
|
|
20 |
|
|
0 |
X: 1.959 |
X: 3.919 |
|
||
-20 |
Y: 5.078 |
Y: 4.912 |
|
|
|
-40 |
|
|
1 |
|
|
X: 1.969
Y: 1.036
0.5 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
0 |
|
X: 0.5741 |
|
X: 1.896 |
|
|
|
X: 3.86 |
|
Y: 11.15 |
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
|
Y: 5.022 |
|
|
|
Y: 4.952 |
-20 |
|
|
|
X: 2.008 |
|
|
|
|
|
|
|
Y: -32.75 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-40 |
0.5 |
1 |
1.5 |
2 |
2.5 |
3 |
3.5 |
4 |
0 |
||||||||
|
|
|
|
|
|
|
|
ȼɪɟɦɹ, ɫ |
Рис. 1.18. Результаты моделирования процессов пуска и реверса двигателя |
||||||||
при нулевых начальных значениях частоты вращения и тока возбуждения |
||||||||
20